gmsl专题

实物仿真平台设计方案:927-8路GMSL视频注入回灌的自动驾驶半实物仿真平台
8路GMSL视频注入回灌的自动驾驶半实物仿真平台 一、平台介绍 产品基于8路GMSL视频注入回灌的自动驾驶半实物仿真平台旨在提高实验室及研究生院师生在基础软件层开发、计算机视觉和深度学习方面的专业知识学习和实践能力,为师生提供一个稳定软件开发和多精度框架学习和训练平台,为后续相关专业技能培训提供提供全面的硬件加速支持和软件仿真模拟服务,完善相关行业中的应用并实现全面测试评估。
【相机方案】智能驾驶的域控采用的“串行器和解串器”方案的总结(持续更新),SerDes,GMSL
SerDes是Serializer/Deserializer的缩写,即串行器和解串器。由于同轴线的传输延迟几乎可以忽略不计(ns级别),相当于将原来只能短距离传输的高速并行信号(MIPI/I2C/CLK等)的传输距离延长,真正做到高带宽、低延迟、长距离的数据传输。 SerDes的串行-解串可以通过数模电路或者FPGA来实现。在商用领域,出于性价比的考量,往往会使用独立IC芯片来实现这个功能,GM


GMSL相机的相关配置(1)
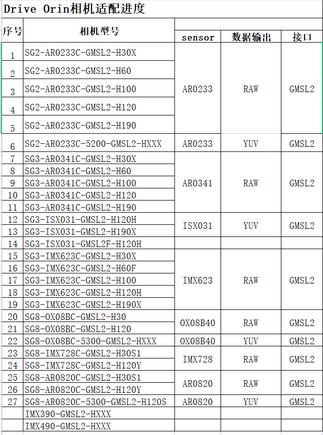
文章目录 一:GMSL相机的信息二:相关配置1.emmc系统下运行upgrade文件2.连接GMSL相机3.给ui可执行文件赋权限4.进入图为GMSL相机配置ui图形界面5.运行程序,打开摄像头 一:GMSL相机的信息 我选择相机适配于基于Jetson AGX Orin的图为智盒T906G,相机型号是SG2-IMX390C-5200-GMSL2,通过GMSL2接口进行连接,
linux v3h平台开发系列详解(GMSL摄像头篇):1.3 两路GMSL相机
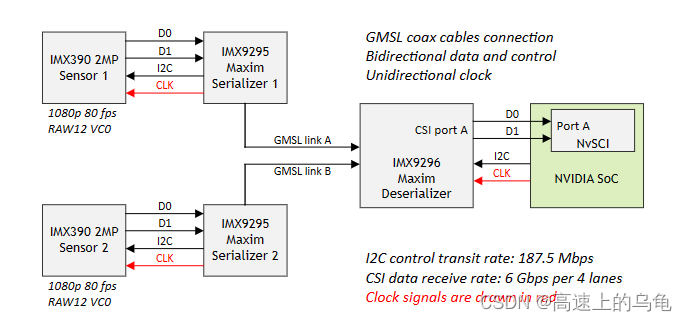
1、两路相机链路 下图显示了 的控制、数据和时钟连接 参考GMSL模块在Jetson AGX Xavier系列上经过验证。 2、基本配置 在此 GMSL 设置中,两个传感器与其各自的串行器配对,每个传感器通过 x1080 CSI MIPI 通道流式传输 30p/12fps RAW2 像素串行器通过不同的 GMLS 端口(端口 A 和 B)和使用同轴电缆的 GMSL 链路连接到 GMSL

图像工坊Jetson系列GMSL/FPDlink相机采集套件产品展示
说明: 应淘宝店老板睡服 帮忙宣传下之前采购的淘宝店Jetson系列GMSL/FPDlink相机采集套件 现在出了不少板子可进行选购,比之前可选的产品多了不少,完善了很多; 价格也便宜了很多 有需要可以参考如下展示列表 淘宝店网址: 首页-图像工坊-淘宝网 图像工坊Jetson系
Linux ARM平台开发系列讲解(GMSL摄像头篇)1.3 MAX9295 GMSL注意事项
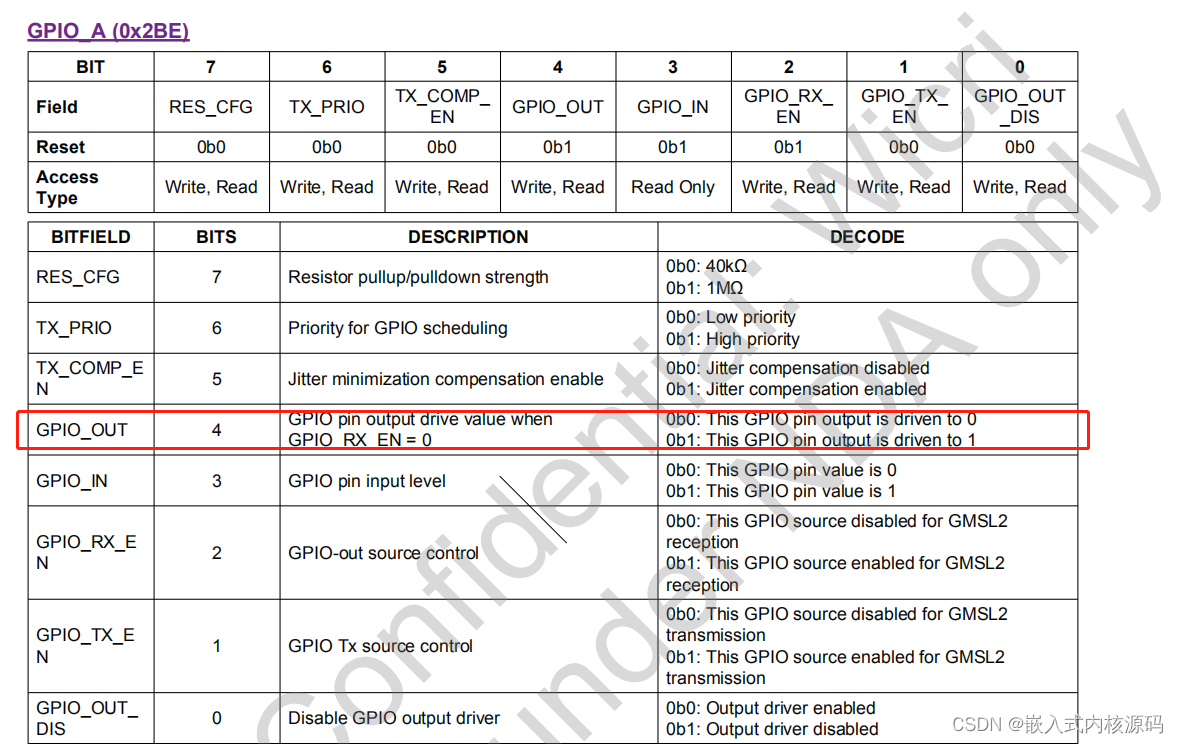
1. 概述 MAX9295芯片是串行器,一般可能会集成在摄像头内部,比如这里提到的AR0233就是这样的结构,官方给出的构造如下,这里需要配置摄像头的电源开关,摄像头和max9295的链路才会打通。 2. MAX9295给摄像头上电 由上图结构可知,MAX9295需要控制MFP8和MFP0给摄像头和ISP上电,所以这里需要给高电平。如下图MAX9295内部可扩展GPIO共有三组寄