本文主要是介绍cesium-二三维联动优化(ol-cesium),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
cesium-二三维联动优化(ol-cesium)
之前已经实现了ol和cesium联动的效果了,但还是有点问题:cesium和ol平面视角联动还算正常的,但是当cesium为三维视角时联动的效果就出现问题。
这里使用ol-cesium来实现完善的联动效果
ol-cesium
介绍
在 2D 和 3D 之间平滑切换并同步:
- 地图上下文(边界框和缩放级别);
- 栅格数据源;
- 2D 和 3D 的矢量数据源;
- 地图选择(选定项目);
- 地图和地球视图之间的动画过渡。
ol-cesium官网地址
安装
我这里使用的是vue-cli框架
使用npm安装ol-cesium
npm i ol-cesium
使用例子如下:
import OLCesium from 'ol-cesium';
const ol3d = new OLCesium({map: ol2dMap}); // ol2dMap is the ol.Map instance
ol3d.setEnabled(true);
具体的参考demo可以去官网看看
实现效果
ol-cesium二三维联动
我的这个项目并不需要全部的ol-cesium功能,我只需要其中一部分功能:cesium和ol视角联动的效果
最终效果实现的二三维同步效果如下:
这里我对代码进行来修改,提取了部分功能出来
实现代码
项目结构
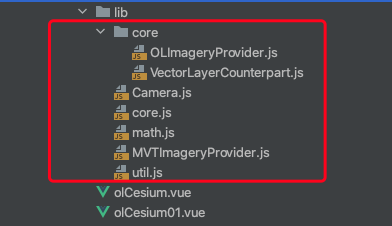
lib目录中为从ol-cesium中提取出来的代码
核心代码是Camera.js,其它代码为相关依赖,主要就是修改一下相应代码的依赖
主要代码
testOLCs()
使用camera方法
- new olcsCamera(this._viewer.scene, this.map);这里传入cesium的viewer和ol的map,让camera来管理两个地图的视角
- checkCameraChange();开启viewer和map变化的监听
render_()
用于渲染铯场景
requestAnimationFrame()
请求动画帧回调方法
核心方法
testOlCs() {this.camera_ = new olcsCamera(this._viewer.scene, this.map);this.camera_.checkCameraChange();},/*** 渲染铯场景*/render_() {// 如果对 `requestAnimationFrame`(请求动画帧) 的调用处于挂起状态,请取消它if (this.renderId_ !== undefined) {cancelAnimationFrame(this.renderId_);this.renderId_ = undefined;}this.renderId_ = requestAnimationFrame(this.onAnimationFrame_.bind(this));},/*** Callback for `requestAnimationFrame`. 请求动画帧回调方法* @param {number} frameTime The frame time, from `performance.now()`.帧时间* @private*/onAnimationFrame_(frameTime) {this.renderId_ = undefined;// 检查帧是否在目标帧速率内渲染const interval = 1000.0 / this.targetFrameRate_;const delta = frameTime - this.lastFrameTime_;if (delta < interval) {// 太早了,还没渲染this.render_();return;}// 渲染一帧的时间,节省时间this.lastFrameTime_ = frameTime;const julianDate = this.time_();this.scene_.initializeFrame();this.scene_.render(julianDate);this.camera_.checkCameraChange();// 在这个完成后请求下一个渲染调用,以确保浏览器不会得到备份this.render_();}
完整代码
<template><div class="home"><cesiumComponent ref="refCesium"/><div id="eye"></div></div>
</template><script>
import cesiumComponent from '../cesium/cesium.vue'
import olcsCamera from './lib/Camera.js';export default {name: "olCesium01",data() {return {_viewer: undefined,scene_: undefined,view_: undefined,camera_: null,targetFrameRate_: Number.POSITIVE_INFINITY,lastFrameTime_: 0,time_: function () {return Cesium.JulianDate.now()},layer: {tiandituVecLayer: '',tiandituCvaLayer: '',tiandituImgLayer: '',tiandituCiaLayer: '',},map: '',};},components: {cesiumComponent},mounted() {this.init();this.addTiles();},methods: {init() {let that=this;this.$refs.refCesium.initMap();let viewer = this.$refs.refCesium._viewer;this._viewer = viewer;that.scene_ = viewer.scene;//渲染铯场景that.render_();this.addOlMap();this.testOlCs()},addOlMap() {var that = this;//普通地图this.layer.tiandituVecLayer = new ol.layer.Tile({title: 'generalMap',source: new ol.source.XYZ({url: 'http://t3.tianditu.com/DataServer?T=vec_w&x={x}&y={y}&l={z}&tk=token',crossOrigin: 'anonymous'}),// zIndex: 1,visible: true});//普通地图标记that.layer.tiandituCvaLayer = new ol.layer.Tile({title: 'generalMapZj',source: new ol.source.XYZ({url: 'http://t3.tianditu.com/DataServer?T=cva_w&x={x}&y={y}&l={z}&tk=token',crossOrigin: 'anonymous'}),visible: true});//影像地图that.layer.tiandituImgLayer = new ol.layer.Tile({title: 'generalMapImg',source: new ol.source.XYZ({url: 'http://t3.tianditu.com/DataServer?T=img_w&x={x}&y={y}&l={z}&tk=token',crossOrigin: 'anonymous'}),visible: true});//影像地图标注that.layer.tiandituCiaLayer = new ol.layer.Tile({title: 'generalMapImgZj',source: new ol.source.XYZ({url: 'http://t3.tianditu.com/DataServer?T=cia_w&x={x}&y={y}&l={z}&tk=token',crossOrigin: 'anonymous'}),visible: true});this.map = new ol.Map({target: 'eye',layers: [that.layer.tiandituImgLayer,that.layer.tiandituCiaLayer,that.layer.tiandituVecLayer,that.layer.tiandituCvaLayer,],view: new ol.View({center: [13410926.774433982, 3715530.4937355495],zoom: 12}),controls: ol.control.defaults({attributionOptions: {collapsible: false}})});this.view_ = this.map.getView();},addTiles() {// cesium加载代码let tileSet = this._viewer.scene.primitives.add(new Cesium.Cesium3DTileset({url: '../res/data/3dtiles/tianjie/tileset.json',modelMatrix: Cesium.Matrix4.fromArray([0.9972458032561666, 0.04372029028528979, 0.05991113506964879, 0,-0.03623787897545647, 0.9920229449104262, -0.12073646051879428, 0,-0.06471185374661931, 0.11823287609043515, 0.9908750491338749, 0,-663.0794944260269, 1211.490494620055, 2974.1003134818748, 1]),}));this._viewer.flyTo(tileSet);},testOlCs() {this.camera_ = new olcsCamera(this._viewer.scene, this.map);this.camera_.checkCameraChange();},/*** Render the Cesium scene*/render_() {// if a call to `requestAnimationFrame` is pending, cancel itif (this.renderId_ !== undefined) {cancelAnimationFrame(this.renderId_);this.renderId_ = undefined;}this.renderId_ = requestAnimationFrame(this.onAnimationFrame_.bind(this));},/*** Callback for `requestAnimationFrame`.* @param {number} frameTime The frame time, from `performance.now()`.* @private*/onAnimationFrame_(frameTime) {this.renderId_ = undefined;// check if a frame was rendered within the target frame rateconst interval = 1000.0 / this.targetFrameRate_;const delta = frameTime - this.lastFrameTime_;if (delta < interval) {// too soon, don't render yetthis.render_();return;}// time to render a frame, save the timethis.lastFrameTime_ = frameTime;const julianDate = this.time_();this.scene_.initializeFrame();this.scene_.render(julianDate);this.camera_.checkCameraChange();// request the next render call after this one completes to ensure the browser doesn't get backed upthis.render_();}},created() {},
}
</script><style scoped>
.home {height: 100%;width: 100%;margin: 0;padding: 0;overflow: hidden;
}#eye {position: absolute;width: 20%;height: 20%;bottom: 0;right: 0;z-index: 999;background: red;border: solid blue 1px;
}#cesiumContainer {height: 100%;width: 100%;margin: 0;padding: 0;overflow: hidden;
}
</style>

这篇关于cesium-二三维联动优化(ol-cesium)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





