本文主要是介绍ROS学习笔记一:publishers and subscribers,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
ROS学习笔记一:publishers and subscribers
个人把ROS看做是一种通信机制的框架,围绕着三种通信机制有很多其他的功能,核心还是三种通信机制
- publishers/subscribers
- services/clients
- action-servers/action-clients
为了确保这种通信机制能够顺利运行,引入了nodes、topic和messages等等的概念,使得这种通信机制更具逻辑性以及便于理解。
在ROS框架下,可以把一个大项目分成若干个小部分,让不同的人去完成,最后通过ROS这个框架,将每个人负责完成的那部分作为一个node,通过在topic上发布和订阅messages,这就实现了各个nodes之间的通信,将各个node连接起来,组合完成这个项目。
一.publishers/subscribers
一个node既可以是publishers也可以是subscribers,可以同时发布topic的信息,也可以订阅topic上的信息,这里面有一个很重要的特性,一个subscriber只需要知道它要订阅的那个topic的名称,并不需要准确知道是哪一个publisher发布的这个topic,同样的,一个publisher也只管发布topic的消息就行了,不用管谁会来订阅这个topic上的信息,一个subscriber可以订阅很多个topic上的信息。
信息发布的间隔是不确定的,所以subscribers有可能会错过这个消息,这种通信机制比较适合重复的消息,比如产生的某种传感器的数值。
以下是一个publisher节点的代码:
#include <ros/ros.h> //惯例第一头文件,ROS的源码
#include <std_msgs/Float64.h> //传递的消息类型文件,根据实际需要选择对应的消息类型头文件 int main(int argc, char **argv) { //每一个节点只有一个main函数ros::init(argc, argv, "minimal_publisher2"); // 初始化这个节点, 双引号中的是节点名, 可以通过.launch文件启动时更改节点名(不建议)ros::NodeHandle n; // 创建一个与ROS系统对话的pulisher对象(n是随意命名的)ros::Publisher my_publisher_object = n.advertise<std_msgs::Float64>("topic1", 1); //创建一个发布消息类型为std_msgs::Float64的topic(即topic1)的对象(即my_publisher_object)//这里定义了发布topic的名称,其他subscribers想要订阅这个topic的信息只需要知道这个topic的名字是topic1就可以了//参数1是指queue size,可以理解为通道大小,一般设置为1,即传递的信息是1个接着1个,不是多个齐头并进传输到subscribers处的 std_msgs::Float64 input_float; //定义了一个以std_msgs::Float64为消息类型的变量//任何发布到topic上的信息都必须要定义好对应的格式,这样subscribers才知道怎么去解读这个信息ros::Rate naptime(1.0); //设置发布信息的间隔时间,如果不设置,系统会尽全力去输出,有多快就多快的去发布信息,很多时候是没必要的,浪费CPU//还要在while循环里加上naptime.sleep(); 这样就完成了间隔时间的设定input_float.data = 0.0;初始化变量input_float的值while (ros::ok()) {input_float.data = input_float.data + 0.001; //变量以0.001的速度迭代增长my_publisher_object.publish(input_float); // 在topic上发布变量(input_float)的数值信息naptime.sleep(); 与ros::Rate naptime(1.0)对应,设置间隔时间}
}以下是一个subscriber节点的代码:
#include<ros/ros.h> //惯例第一头文件,ROS的源码
#include<std_msgs/Float64.h> //传递的消息类型文件,根据实际需要选择对应的消息类型头文件
void myCallback(const std_msgs::Float64& message_holder) //subscriber节点与publishers节点有一个很大不同就是需要有一个回调函数即callback function
{ //函数中的std_msgs::Float64是topic1的信息类型,并把接收到的信息储存在参数message_holder中// 每当有信息发布到topic1上,就会激活回调函数,很多工作都是在回调函数中进行的,main函数中一般都是获取最后的结果 ROS_INFO("received value is: %f",message_holder.data); //ROS_INFO跟cout和printf很像,但在ROS中要优于cout和prinf,它发布的消息会被记录或监测,可以通过rosbag这个指令来对被记录的数据进行回放
} int main(int argc, char **argv)
{ ros::init(argc,argv,"minimal_subscriber"); //初始化,命名这个subscriber节点ros::NodeHandle n; // 创建一个与topic1通信的对象,订阅topic上的信息ros::Subscriber my_subscriber_object= n.subscribe("topic1",1,myCallback); //这个跟publisher很像,但是需要在queue size后面加上回调函数名ros::spin(); //callback函数需要时间响应,所以加入ros::spin()只有当callback函数完成计算后才会进行下一个运算周期,这个时候main函数会被暂停,而callback函数不受影响return 0; //一般不会运行到这里,除了roscore被kill
} 最后要整个包编译成功,还需要
- 在package.xml文件中添加相应的依赖项和包
- 在CMakeLists.txt中添加生成可执行文件的命令行及其依赖的库文件
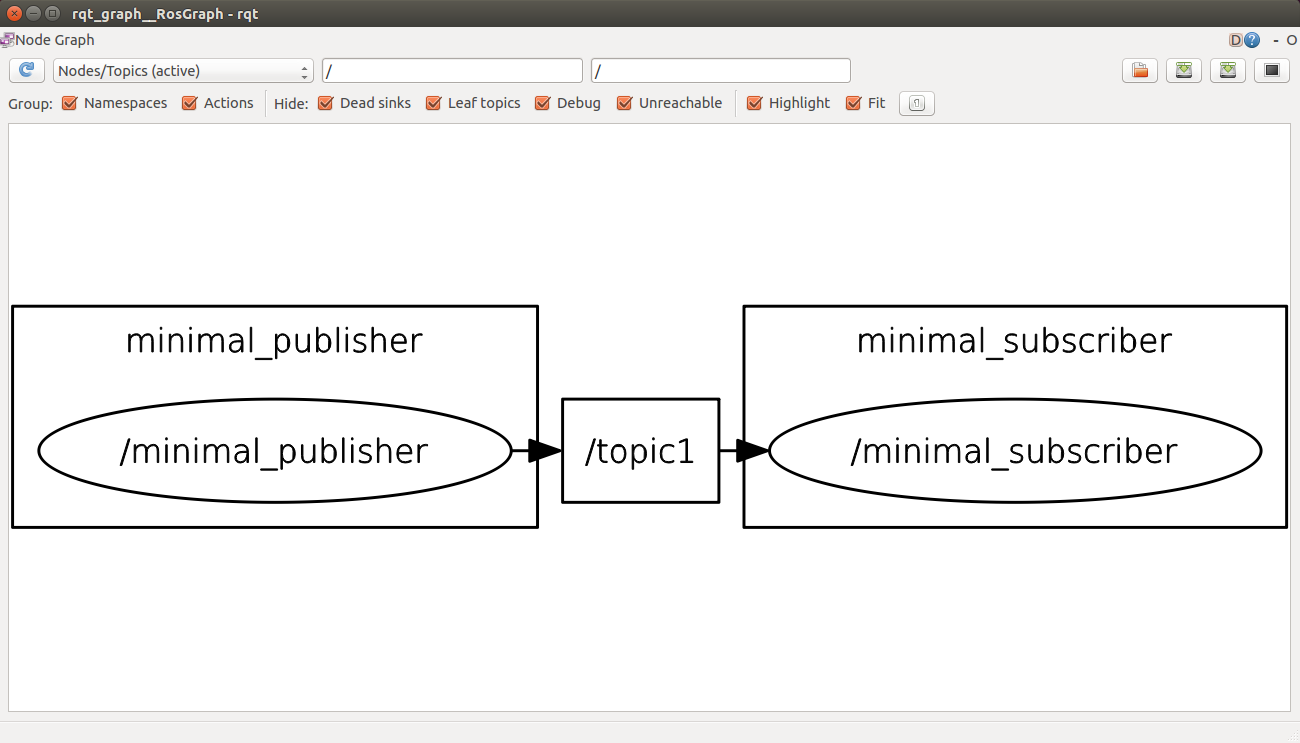
最后通过rosrun分别在两个terminal中运行两个node,再通过rqt_graph查看两节点的关系
二.ROS Tools:
常用的指令
| 常用指令 | 说明 |
| rosnode list | 查看所有激活的节点 |
| rostopic list | 查看所有激活的topic |
| rostopic info <topic name> | 可以查看topic的调用信息类型,还有它的发布者以及订阅者 |
| rostopic echo <topic name> | 查看对应topic发布的消息 |
| rqt_graph | 以图像的形式表现整个正在运行的ROS系统 |
| rqt_plot velocity/data | 以二维图的形式查看topic的输出 |
| rosmsg show package/messageName | 例如:rosmsg show std_msgs/Float64 查看对应的消息类型 |
| rosrun <packagename> <node name> | 运行包中的节点(编译成功后才能运行) |
| roslaunch <package name> <launch file> | 启动.launch文件 |
| catkin_make | 进入到工作区间后,执行会编译所有的包 |
| catkin_make -DCATKIN_WHITELIST_PACKAGES=package | 编译指定的包 |
边学边总结吧,有新的理解再更新,欢迎多多交流学习,共同进步。
这篇关于ROS学习笔记一:publishers and subscribers的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







