本文主要是介绍NXP再出手,让天下没有难做的「4D成像雷达」,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
4D成像毫米波雷达市场进展,超出很多企业的预期。随着宝马iX、上汽智己、路特斯等多款车型前装搭载量产,不管是大陆集团、采埃孚、博世等传统雷达巨头,还是福瑞泰克、川速微波、为升科等新进入者,都在主推4D雷达。
在大陆集团看来,ARS540 4D成像雷达提供了四维(距离、多普勒、方位角、仰角)的直接和独立探测能力,从而产生了独特的传感器性能,通过基于密集点云的前融合,可以大幅提升智能驾驶系统的安全性和舒适性。

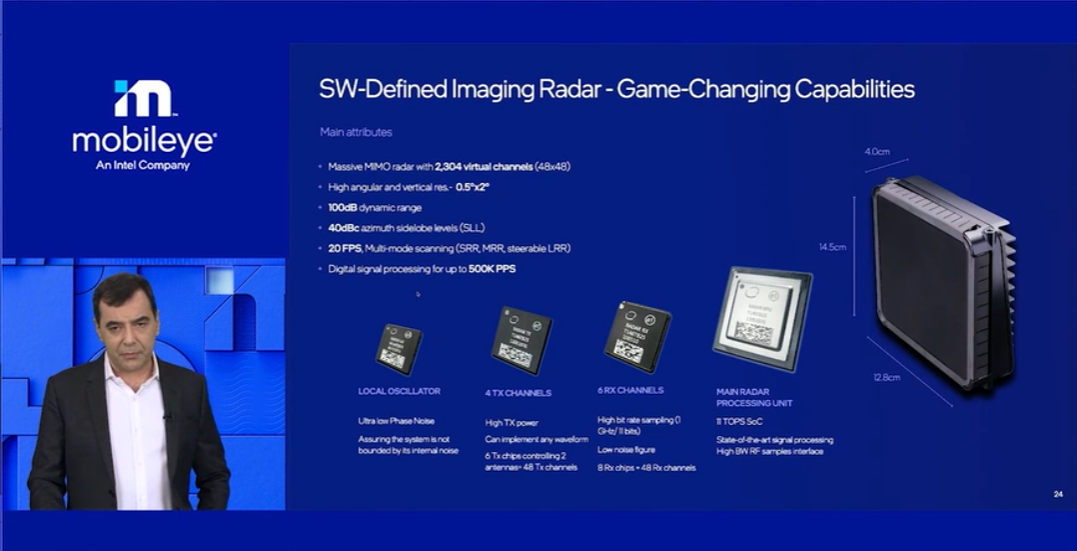
尤其是特斯拉在“抛弃”传统3D雷达(速度、距离和方位角)之后,原因是,毫米波雷达的角分辨率性能瓶颈阻碍了多传感器的前融合效果。而同样视觉起家的Mobileye也已经在部署4D成像雷达的研发,具有2304个虚拟通道(高于大陆、采埃孚的192个),计划于2025年量产。
不过,摆在4D雷达面前的难题还有很多。比如,虚拟通道的数量能否继续提升,核心元器件的成本能否继续下降(包括专用处理芯片),点云处理算法性能是否能跟上硬件的能力。
按照Arbe(一家4D雷达初创公司)的说法,大陆集团的ARS540,基于4个3发4收芯片级联实现12*16阵列,以及Xilinx FPGA,整体系统的成本约为220美元(仍然较高),同时需要高功耗,有散热问题,并仅支持较低的帧速。
而现如今,如果哪家毫米波雷达厂商说自己没有研发4D成像雷达,在一级市场的估值都要打个折扣。即便是博世这样的巨头,也在去年急忙推出了第五代至尊版毫米波雷达,试水4D赛道。
一、
目前,汽车毫米波雷达行业主要有两种方式实现4D雷达量产(还有超材料技术的路径,但量产难度较大),一种是基于NXP、TI等传统雷达天线及芯片方案商提供的标准方案。一种是类似Arbe、Mobileye自研芯片。
其中,第一种方式是主要选择项。同时,也在一定程度上降低开发成本。
2020年底,NXP宣布推出新的TEF82xx单芯片方案,采用16nm FinFET和40nm RFCMOS技术,支持76-81GHz频段,可用带宽高达4GHz。一个6位相位旋转器,支持调制MIMO和波束转向。
TEF82xx是一颗完全集成的RFCMOS芯片,三发四收、Exposed Die封装方案提供了增强的热性能,符合ISO26262 ASIL B级标准,支持短、中、远程雷达应用,2021年开始批量生产。
紧接着,NXP推出了全新的S32R294和S32R45 4D成像雷达SoC解决方案。其中,S32R294解决近距离角和前/后雷达应用,而S32R45提供4D成像的特征检测和分类支持。

S32R45芯片架构图
S32R294采用NXP的z系列处理器内核,实时Z4内核同步运行,而双Z7处理器用于处理应用程序。整体性能是此前S32R274 SoC的两倍,包括支持CSE3安全模块设计的OTA更新,可用于处理最多两颗TEF82xx芯片。
而S32R45则标志着恩智浦向Arm平台的迁移,SoC具有多个同步运行的Cortex- M7以及一对Cortex-A53应用内核,也支持锁步机制。
此外,该芯片有8MB的SRAM与ECC支持以及外部DDR支持。它具有一个用于处理附加外设的PCI Express接口,以及八个具有CAN-FD支持的FlexCAN接口,还包括两个Gb以太网端口。
S32R45可以执行与S32R294相同的任务,但它也能够处理特征检测和分类(识别不同类型的对象,如人、车和动物),不过需要更多的计算能力。
2022年初,NXP正式宣布,业界首款专用16nm成像雷达处理器S32R45量产,基于该方案开发的4D成像雷达是第一款可同时提供短、中、远程三合一多模式雷达,支持192个虚拟天线通道以及上一代处理器64倍的计算性能。
同时,更高性价比的处理器S32R41,专为L2+自动辅助驾驶应用量身定制(S32R45则面向更高级别自动驾驶)。而整个S32R平台提供了通用架构,以实现软件复用和快速开发,同时还提供高性能的硬件安全引擎,支持OTA更新,符合新的网络安全标准。
紧接着,NXP与为升科(CubTEK)联手发布最新一代4D成像雷达方案,提供图像级感知能力和小于0.1度的角度分辨率,实现增强4D感知功能,满足L3级以上自动驾驶的感知需求。

在关键参数方面,由于精密天线与NXP处理器上的硬件加速功能进行了高度协同工作,该款4D成像雷达可以同时进行短程和远程的测距,能够同时分辨前方200-300米处并行行驶的两车。
二是速度方面,这款4D成像雷达能够确定车辆和物体各自的速度,这些信息在自动紧急制动、自适应巡航控制等与路线规划有关的安全驾驶决策当中极为重要。
三是方位角,即被检物体距离雷达中心线的右侧或左侧的距离,如果有多个物体距离很近,为升科CubTEK与NXP联手打造的这款4D成像雷达可以提供小于1°的方位角分辨率,能够将这些物体彼此区分开。
四是仰角的测量,这款4D成像雷达能够计算出物体相对于路面的高度,然后确定车辆能否安全地通过被检测的物体,如不能通过则需要避开这些物体,主要应用在探测道路上方的立交桥或其他桥梁。
目前,为升科(CubTEK)的毫米波雷达已经在国内前五大商用车厂实现前装量产,在国内牵引车前装雷达市场份额占比已经超过了50%,是商用车毫米波雷达前装量产规模Top1企业。
与此同时,在乘用车领域,为升科(CubTEK)也已经拿下了多家企业的量产订单,涉及舱内感知、角雷达、前向雷达等。
按照NXP的测算,从L2+到要求最高的L5,每辆车可能需要超过10个成像雷达传感器。以L2+为例,4-6个成像雷达,可以实现360度环绕感知,从而替代传统角雷达无法满足AVP的需求。
比如,川速微波(聚速电子)研发生产的77GHz增强版AVP角雷达,提供角雷达模式和4D点云模式,水平角探测范围±75°,俯仰角探测范围±15°;最远探测距离120米。其中,4D点云模式用于AVP泊车,具体包括车位搜索、 自动泊入、自动泊出等功能。
二、
而在关键的雷达算法方面,为升科(CubTEK)的4D成像雷达应用了自研的最新信号处理算法,不仅大幅提升了角度分辨率,还大幅提高了输出点云的正确性、质量。
或许是考虑4D感知算法的高门槛,NXP选择提供标准化的SDK软件包。
近日,NXP宣布推出4D雷达信号处理算法的第一版,作为其高级雷达SDK (PRSDK)的一部分。通过将NXP的软件算法与最新的S32R4x雷达处理器系列紧密耦合,设计人员可以优化雷达系统的性能。
目的之一,就是真正提升雷达探测的安全性和分辨率(实际可用,现在很多雷达厂商可以拿出硬件版本,但在软件能力上还很弱)。比如,专有雷达算法库能够将现成的和已经验证的算法集成到雷达传感器应用中,这有助于加速开发和减少研发投入。
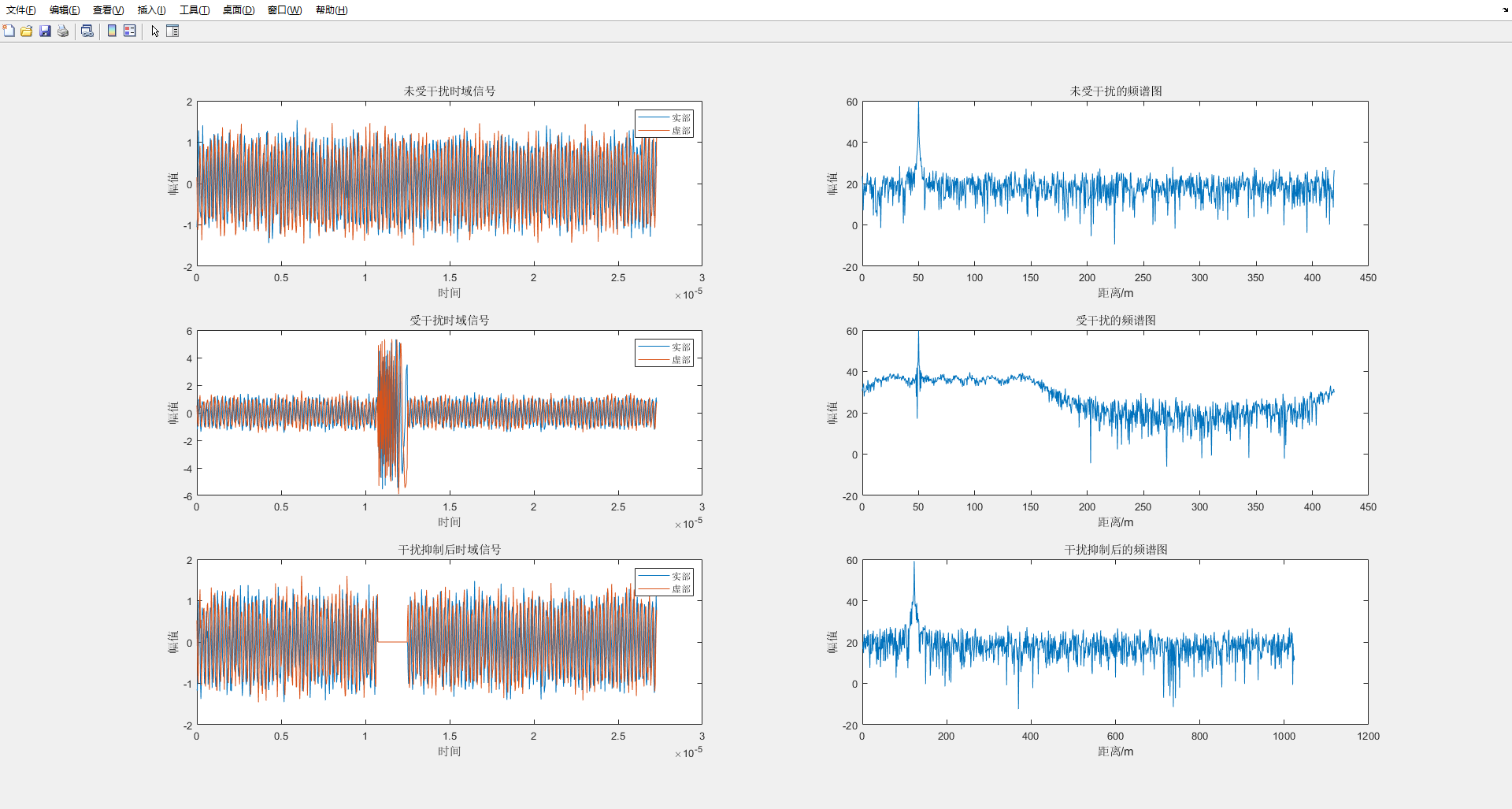
按照计划,第一个软件算法库版本将在今年进行释放,并提交客户进行评估。包括三个算法包,解决干扰消除、MIMO波形优化和角分辨率提高。
其中,优化的MIMO波形对于提供更高分辨率和更长探测距离至关重要。这里的特殊调制过程允许多个发射天线同时运行,并对单个发射天线的信号进行编码。这确保了信号在接收端可以被识别。
此外,高分辨率的可以用于实现更精确的对象分割和分类。同时,PRSDK算法包将定期更新来适应NXP未来的雷达方案路线图(相当于向后兼容),同时满足IATF 16949:2016和ASPICE L3级要求,允许用户定制开发,以满足差异化的需求。
在算法评估方面,NXP提供两种方式,一是基于Matlab的版本将算法作为编译后的代码提供,以帮助开发人员理解PRSDK如何工作。另一种,基于MCU的评估版本包含算法二进制,可以在各自的雷达处理器的开发板上执行。
“4D雷达提供的数据,比视觉系统提供的要复杂得多;不过,前者除了提供目标的位置之外,还提供距离和速度等信息,这是相当有价值的。”安波福相关负责人表示,同时,由于域控制器架构带来的高算力,意味着雷达的机器学习加速成为可能。
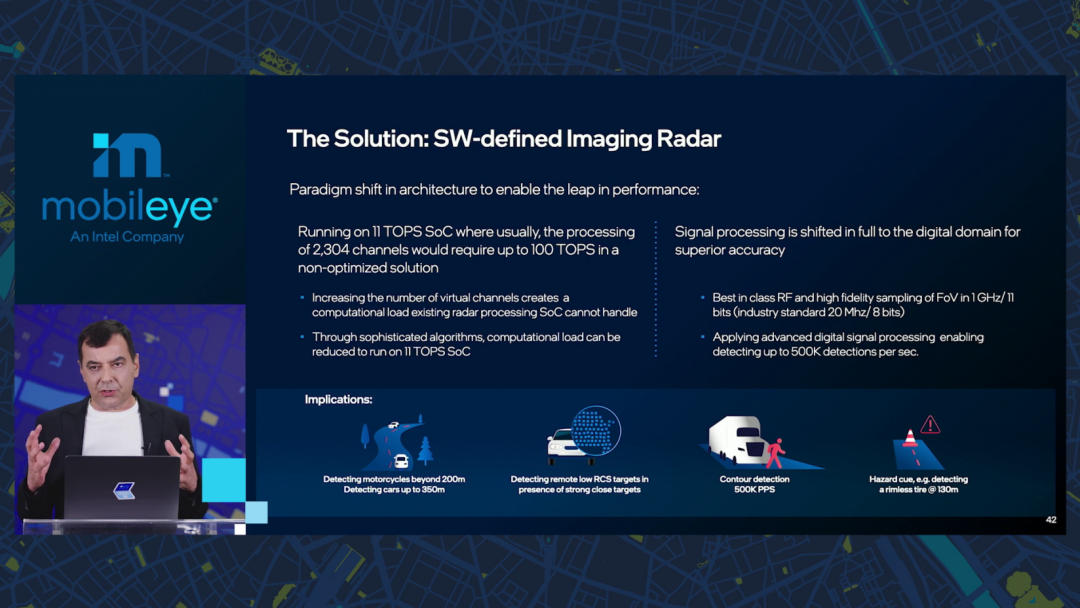
而Mobileye更是将下一代4D雷达提升为“软件定义的数字雷达”概念。
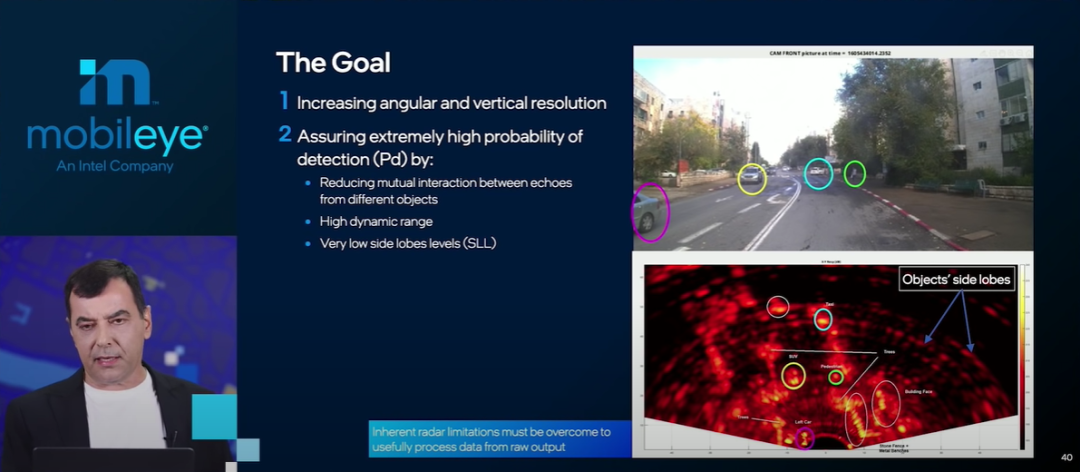
一方面,这种架构上的范式转变使传统雷达性能实现了真正的飞跃——增加检测准确率,同时减少回声的杂波。同时,能实现较弱反射目标的更远探测(300米),以及不必要的静态杂波滤除,从而解决静止物体的识别障碍。
另一方面,软件定义意味着同样的硬件方案,具有更大的灵活性。复杂的专有算法,类似摄像头的计算机视觉技术,可以有效处理雷达探测到的物体。

而更高的灵敏度意味着要处理更多的数据,同时考虑到毫米波雷达相比于摄像头、激光雷达来说,噪音更多。这都需要软件算法来进行优化处理,同时也对处理器的性能要求极高。
比如,NXP的S32R45,配置四颗Arm Cortex-A53@800MHz,提供超过300 GFLOPS的算力,满足192个虚拟通道的数据处理。而Mobileye则提出,在2304个虚拟通道(12倍数量)下,提升处理能力的效率,并控制在11TOPS内。
在高工智能汽车研究院看来,随着类似NXP、TI这样的芯片方案供应商陆续推出4D雷达芯片方案,输出点云数据只是入门级别。数据处理才是真正提高雷达性能所必需的。
BlueSpace.ai是一家专门提供4D雷达、激光雷达等传感器的预测感知软件技术方案的公司,提供任何对象的完整运动状态(不需要事先的训练),与现有的解决方案相比,运动精度提高了10-100倍,并且可部署在低成本的通用嵌入式CPU上。
这家公司瞄准的细分市场机会,正是目前4D成像雷达的现状,“提升雷达的分辨率只是第一步,但目前还没有一款强大的软件能够开箱即用。”
这篇关于NXP再出手,让天下没有难做的「4D成像雷达」的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!