4d专题

51-53 DriveWorld:通过自动驾驶世界模型进行 4D 预训练场景理解 (含模型数据流梳理)
24年5月,北京大学、国防创新研究院无人系统技术研究中心、中国电信人工智能研究院联合发布了DriveWorld: 4D Pre-trained Scene Understanding via World Models for Autonomous Driving。 DriveWorld在UniAD的基础上又有所成长,提升了自动驾驶目标检测、目标追踪、3D占用、运动预测及规划的性能,后期扩大数据集
4D 成像毫米波雷达:新型传感器助力自动驾驶
1 感知是自动驾驶的首要环节,高性能传感器必不可少 感知环节负责对侦测、识别、跟踪目标,是自动驾驶实现的第一步。自动驾驶的实现,首先要能够准确理解驾驶环境信息,需要对交通主体、交通信号、环境物体等信息进行有效捕捉,根据实时感知的环境信息,自动驾驶系统得以完成接下来的决策、规划与控制等环节。传感器的性能会直接影响到感知信息的质量,目前广泛搭载的传感器有摄像头、激光雷达、毫米波雷达、
【百度Apollo】探索自动驾驶:新版本 Beta全新升级算法方向支持4D毫米波,引入新模型提供增量训练
🎬 鸽芷咕:个人主页 🔥 个人专栏: 《linux深造日志》《粉丝福利》 ⛺️生活的理想,就是为了理想的生活! 文章目录 引入一、背景介绍二、引入全新模型,算法检测效果显著提升2.1、更强大易用的激光雷达检测模型CenterPoint检测效果示意 2.2 Beta激光雷达检测的优势检测效果示意 三、相机检测,Yolo X+Yolo 3D

Cinema 4D 2024 for mac 三维建模渲染软件
Cinema 4D 2024 for Mac是一款专业的三维建模、动画和渲染软件,广泛应用于电影制作、广告设计、工业设计等多个领域。它拥有强大的建模工具,能够创建各种复杂的几何体,包括多边形网格、NURBS曲线和体积对象,为用户提供了丰富的设计可能性。同时,Cinema 4D 2024还提供了丰富的材质和纹理编辑功能,使模型表面效果更加逼真。 软件下载:Cinema 4D 2024 for

4D毫米波雷达原理和系统方案
4D毫米波雷达原理和系统方案 附赠自动驾驶学习资料和量产经验:链接 4D毫米波雷达的性能比一般的“3D”雷达要高,体现在距离远,精度高,角分辨率高等方面。 那么4D成像毫米波雷达是如何做到的呢? 本篇文章从雷达指标方程上进行简要的解释,以及介绍一下主流的4D毫米波雷达系统方案。 1. 雷达关键指标方程 2. 为什么必须要增大天线孔径 如果让雷达波束尽可能窄,配合扫描机构实
智能汽车行业产业研究报告:4D成像毫米波雷达—自动驾驶最佳辅助
今天分享的是智能汽车系列深度研究报告:《智能汽车行业产业研究报告:4D成像毫米波雷达—自动驾驶最佳辅助》。 (报告出品方:开源证券) 报告共计:43页 视觉感知最佳辅助——4D 成像毫米波雷达 感知是自动驾驶的首要环节,高性能传感器必不可少 感知环节负责对侦测、识别、跟踪目标,是自动驾驶实现的第一步。自动驾驶 的实现,首先要能够准确理解驾驶环境信息,需要对交通主体、交通信号、环境物
4D毫米波雷达——ADCNet 原始雷达数据 目标检测与可行驶区域分割
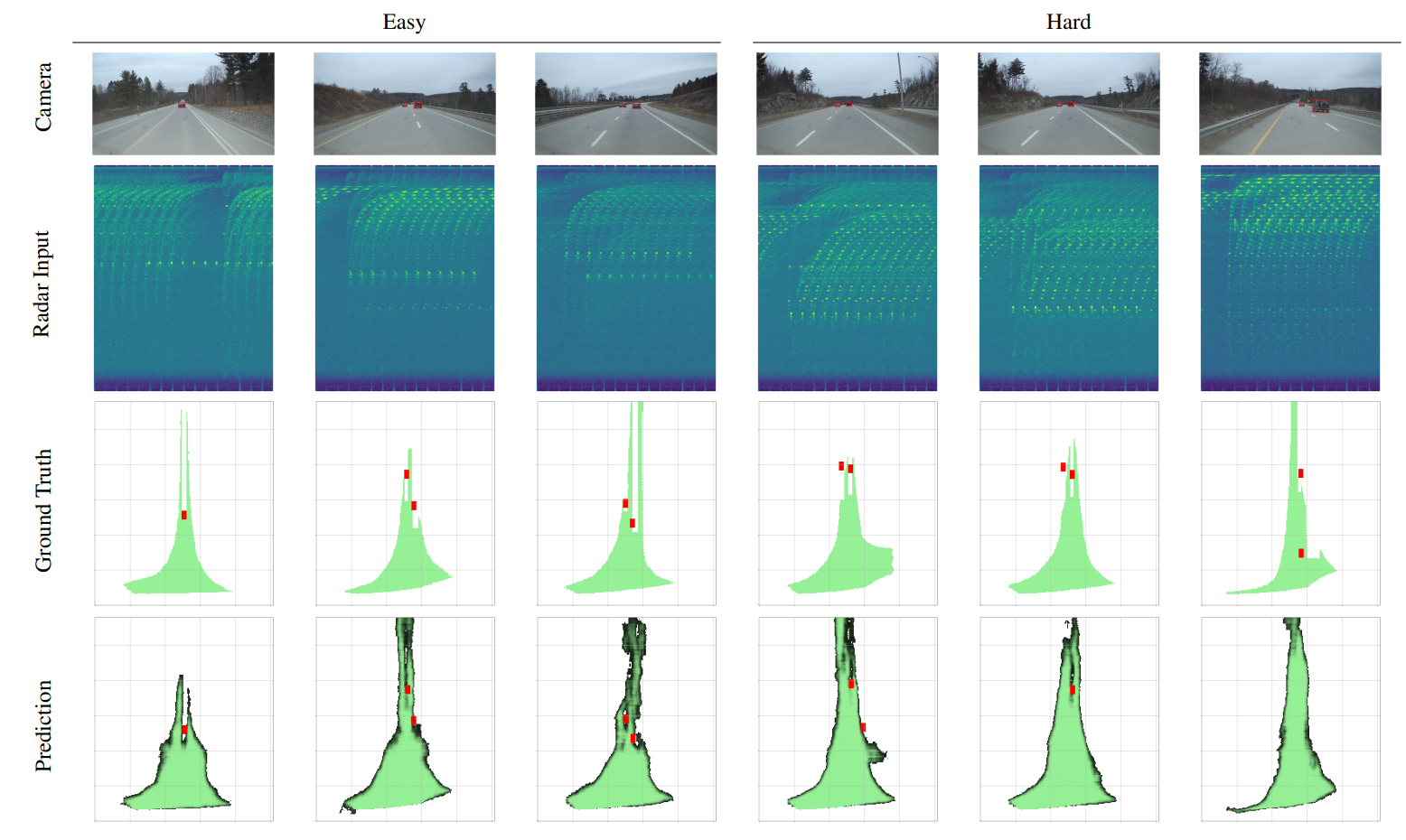
前言 本文介绍使用4D毫米波雷达,基于原始雷达数据,实现目标检测与可行驶区域分割,它是来自2023-12的论文。 会讲解论文整体思路、输入分析、模型框架、设计理念、损失函数等,还有结合代码进行分析。 论文地址:ADCNet: Learning from Raw Radar Data via Distillation 1、模型框架 ADCNet只使用雷达信息,实现车辆检测和可行驶
4D毫米波雷达——RADIal数据集、格式、可视化 CVPR2022
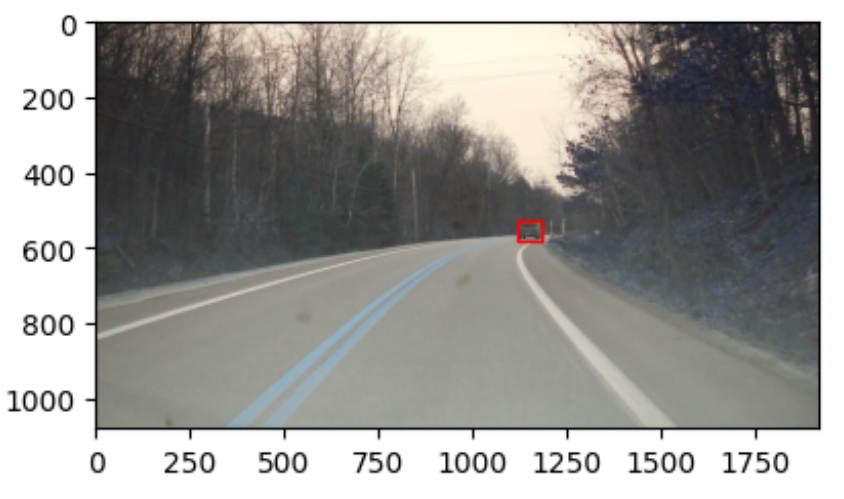
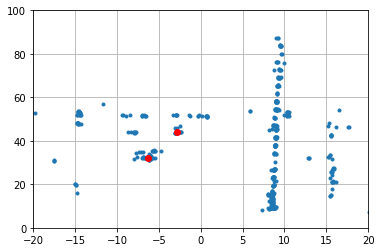
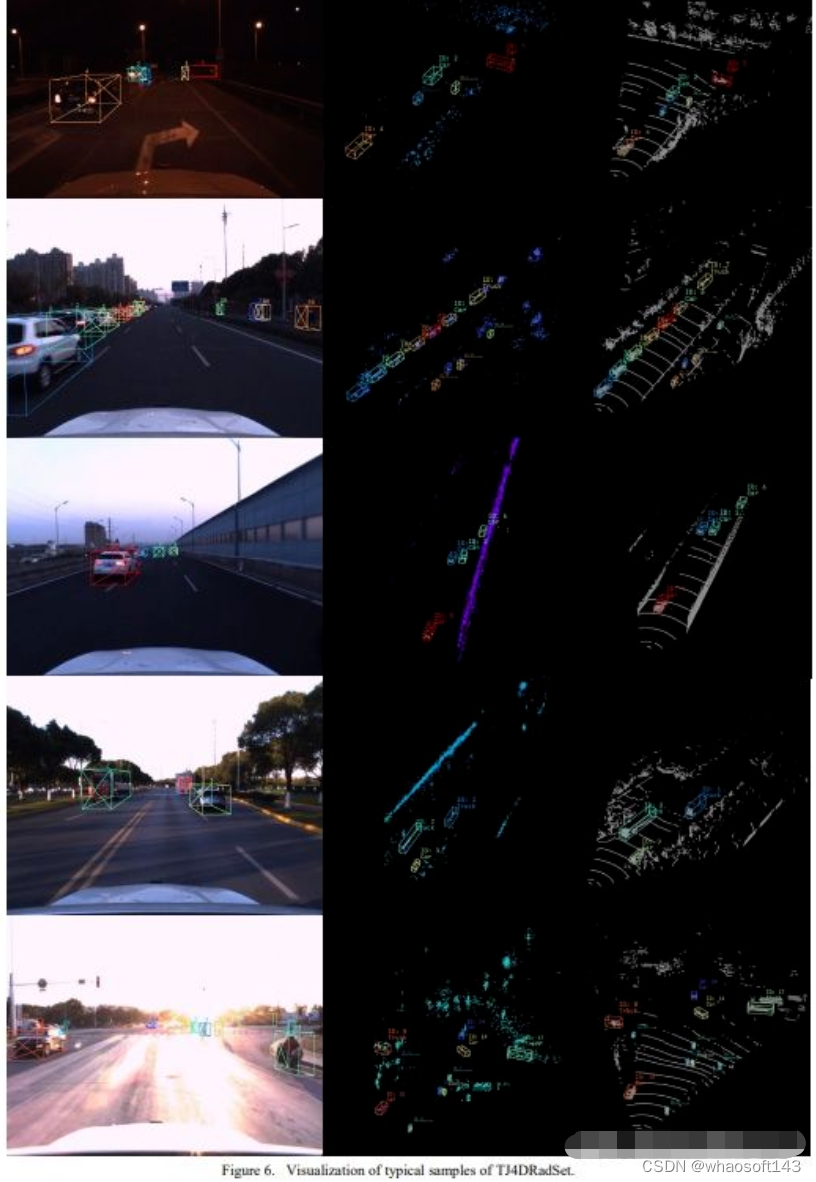
前言 本文介绍RADIal数据集,来自CVPR2022的。 它是一个收集了 2 小时车辆行驶数据的数据集,采集场景包括:城市街道、高速公路和乡村道路。采集设备包括:摄像头、激光雷达和高清雷达等,并且还包括了车辆的 GPS 位置和行驶信息。总共有 91 个视频序列,每个视频时长从 1 分钟到 4 分钟不等,加起来一共是 2 小时。这些视频详细记录了车辆在不同地点和环境下的行驶情况。在大约 25,

对c语言打印格式的理解比如%4d
printf( "%4d", 1);1//输出1的前边有3个空格,补齐4位的宽度printf( "%4d", 11);11//输出11前边有2个空格,补齐4位的宽度printf( "%4d", 11111 );11111//因为超过了4位 不用再补充空格了其实主要我们注意的就是补齐空格的意思 只要小于那个长度我们就不需要补充 这个方法对于我们之后打印也有帮助其实 需要掌握
4D毫米波雷达——FFT-RadNet 目标检测与可行驶区域分割 CVPR2022
前言 本文介绍使用4D毫米波雷达,实现目标检测与可行驶区域分割,它是来自CVPR2022的。 会讲解论文整体思路、输入数据分析、模型框架、设计理念、损失函数等,还有结合代码进行分析。 论文地址:Raw High-Definition Radar for Multi-Task Learning 代码地址:https://github.com/valeoai/RADIal/tree/main
4D毫米波雷达——原理、对比、优势、行业现状
前言 4D 毫米波雷达是传统毫米波雷达的升级版,4D指的是速度、距离、水平角度、垂直高度四个维度。 相比传统 3D 毫米波雷达,4D 毫米波雷达增加了“高度”的探测,将第四个维度整合到传统毫米波雷达中。 4D毫米波雷达被视为未来车载雷达的一种可能的标准配置,因为它在多方面优于传统的毫米波雷达和低线激光雷达,能与高线激光雷达互补。预计这种雷达将被广泛应用于各种车型中。与传统雷达产品相比,4D毫
4D Radar~开源数据汇总
4D Radar在自动驾驶领域中越来越受关注,在价格和功能上都有比较大的竞争力,相关研究也逐渐open,今天为大家盘点下开源的4D Radar数据,为相关科学研究提供保障! 1Astyx 数据集链接:http://www.astyx.net 论文名称:Automotive Radar Dataset for Deep Learning Based 3D Object Detection A
4D 毫米波雷达:智驾普及的新路径(二)
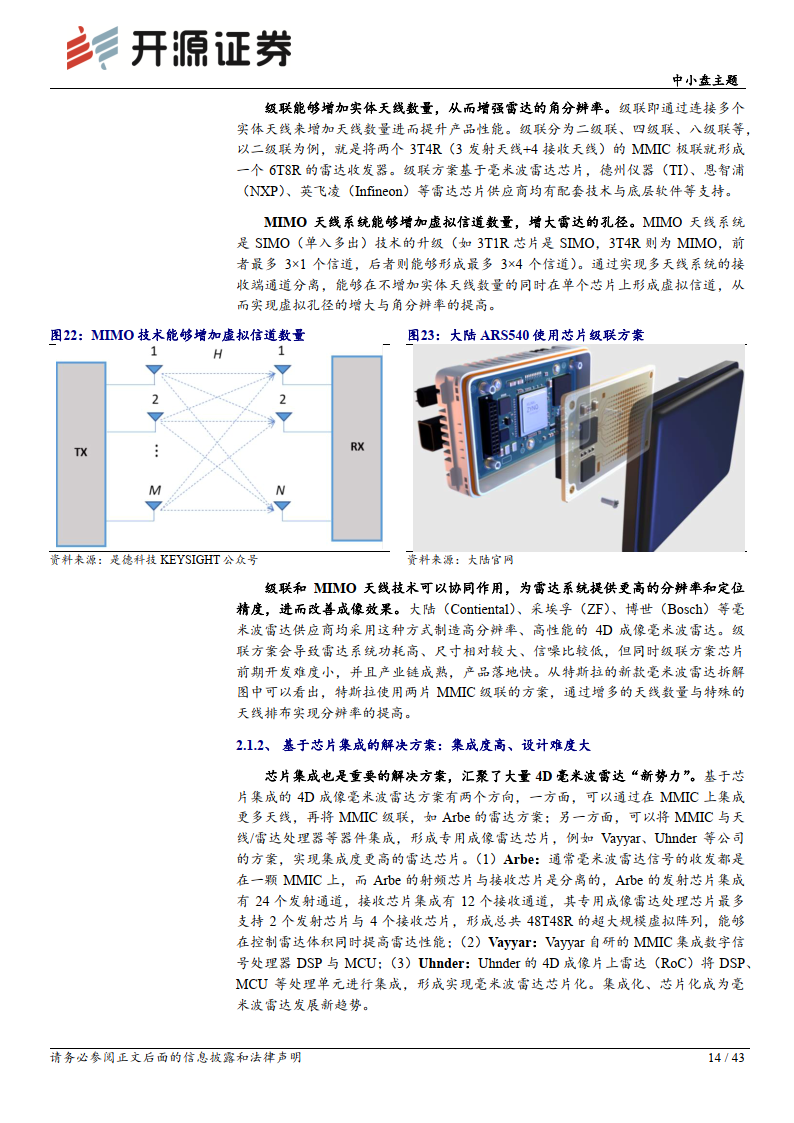
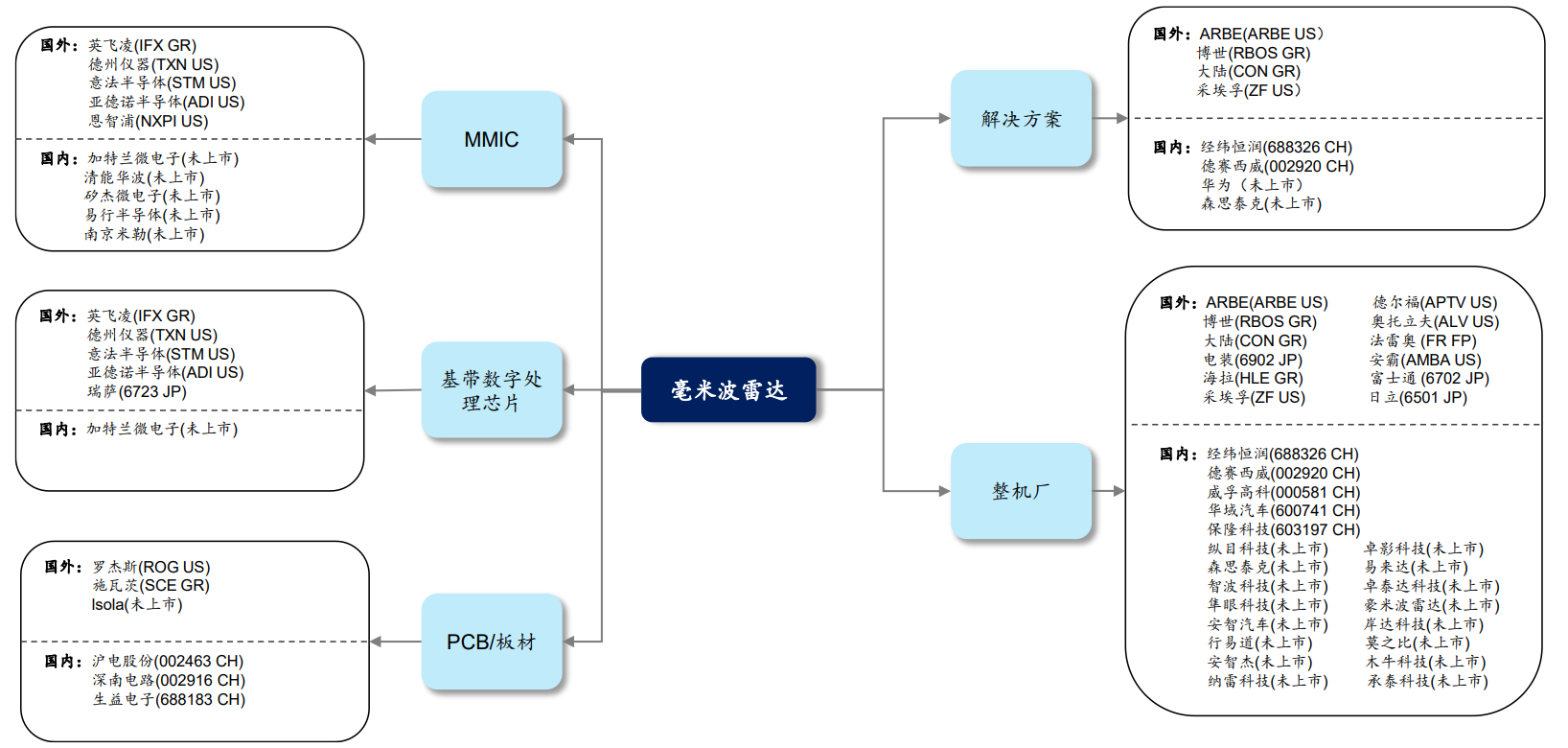
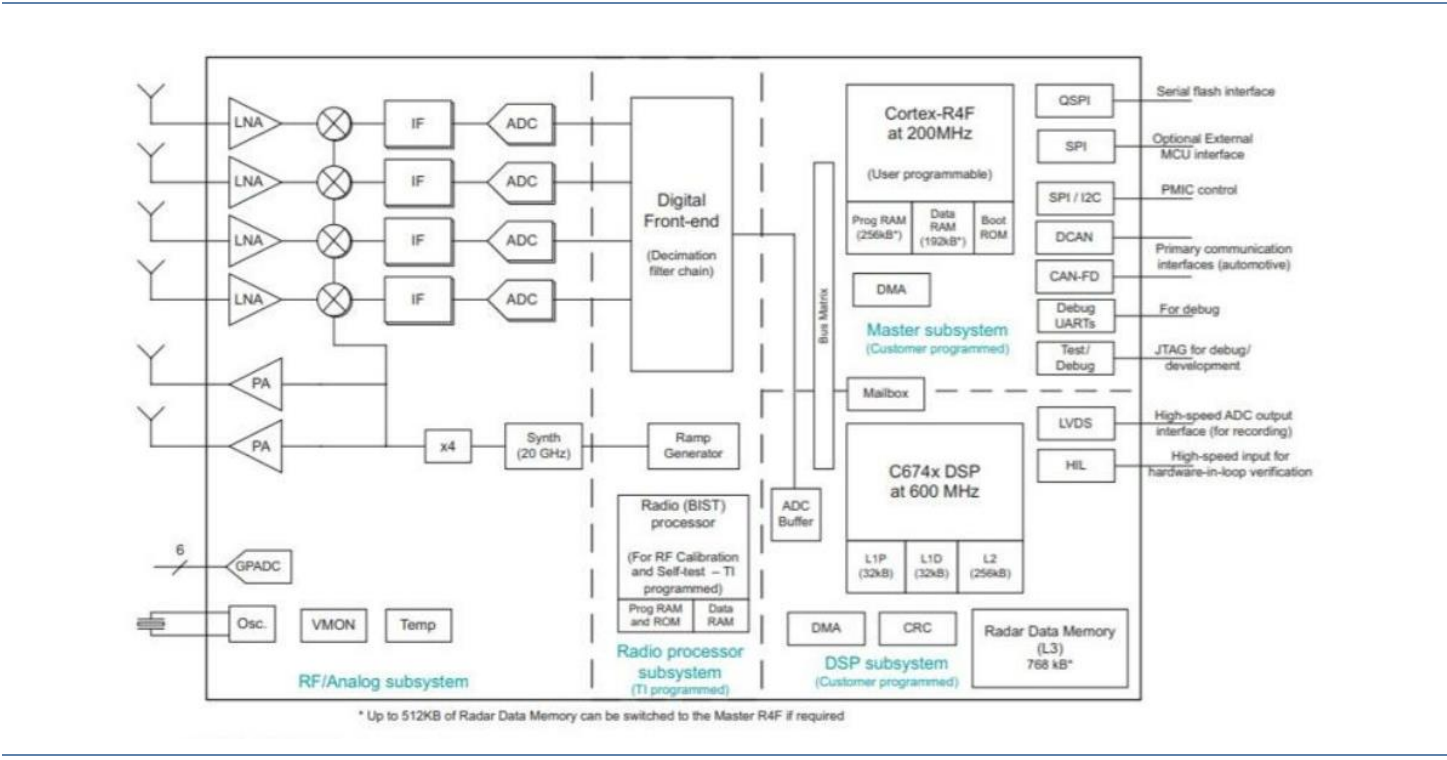
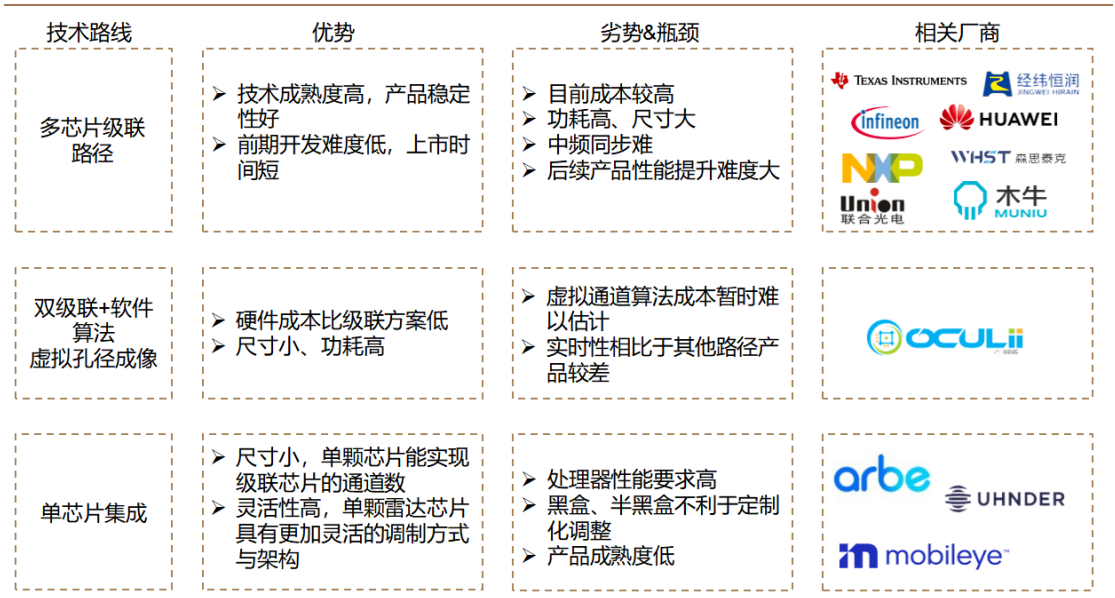
4 4D 毫米波的技术路线探讨 4.1 前端收发模块 MMIC:级联、CMOS、AiP 4.1.1 设计:级联、单芯片、虚拟孔径 4D 毫米波雷达的技术路线主要分为三种,分别是多级联、级联 + 虚拟孔径成像技术、以及 集成芯片。( 1 )多级联:级联方案以成熟的标准雷达芯片为基础,在业内得到广泛应用。级联方案通常应用德州仪器、英飞凌、恩智浦等公司的标准雷达芯片,通过
毫米波雷达:从 3D 走向 4D
1 毫米波雷达已广泛应用于汽车 ADAS 系统 汽车智能驾驶需要感知层、决策层、执行层三大核心系统的高效配合,其中感知层通过传感器探知周围的环境。汽车智能驾驶感知层将真实世界的视觉、物理、事件等信息转变成数字信号,为车辆了解周边环境、制定驾驶操作提供基本保障,并为高级辅助驾驶系统的决策层提供准确、及时、充分的依据,进而由执行层对汽车安全行驶作出准确判断。目前市场上主流的汽车智

史帝奇文旅技术篇——4D动感影院技术方案
该系统是一个4D影院系统,由立体放映系统、特效座椅与特效设备、银幕系统、音响系统、控制系统、操作一体化等子系统构成,各个子系统协同作用,构成一个整体,共同刺激观众的视觉、听觉、触觉、感觉等各个感官,再现影片主题所涉及的环境,环境内的各种细节,以及观众在特定环境内的遭遇等,营造出使人身临其境的整体效果。 4D影院技术方案说明 放映系统根据现场场地采用2台或以上投影机投影机,实现单组画面的平面无缝

史帝奇文旅技术篇——4D动感影院系统技术特点
随着娱乐生活的多样化发展,电影已经成为人们休闲娱乐之首选,忙碌闲暇之余体验4D电影,感受4D带来的新鲜视听体验已经成为当下主流的娱乐放松形式之一。国内建设专业高端4D影院的公司或机构不是很多,本文概述4D动感影院系统的特点,以关键动力电动平台采用电动缸驱动的技术方案为例,希望对有建设或改造4D影院的投资者有所帮助。 4D动感影院,在立体观感基础上加上了动感座椅以及全方位的特

史帝奇文旅新动态——4D动感影院的解决方案
4D影院是在3D立体电影的基础上加环境特效模拟仿真而组成的特种影视产品。所谓4D电影,也叫四维电影;即三维的立体电影和周围环境模拟组成四维空间。观众在看立体电影时,顺着影视内容的变化,可实时感受到风暴、雷电、下雨、泡泡、撞击、喷洒水雾、扫腿等身边所发生与立体影象对应的事件,4D的座椅具有运动,喷水,耳风,捅背、扫腿和振动(音频)等功能,以电动缸驱动作为动力。环境模拟仿真是指影院内安装有下雪、下雨、
4D成像雷达,掀起高阶自动驾驶“革命”的黑科技?
文|智能相对论(aixdlun) 作者|leo陈 马斯克上个月在推特上表示,特斯拉FSD的Beta 9.0版本将不再依赖于雷达。若它真正到来,意味着特斯拉又重整旗鼓,回到了纯视觉的自动驾驶方案。 目前,特斯拉已经更新了北美官网的Model 3宣传页面,关于FSD的内容仅保留了视觉和超声波传感器部分,此前毫米波雷达的信息已经被撤掉。取而代之为:“250米的强大视觉处理能力”。 不同于特斯

进入未来,探索无限创意——Maxon Cinema 4D 2024 Mac/win
在当今数字艺术和动画制作领域,Maxon Cinema 4D一直是业界领先的三维建模和动画渲染软件。而随着2024年的到来,Maxon Cinema 4D将再次引领潮流,为用户带来更多令人惊叹的创意工具和功能。 Maxon Cinema 4D 2024将推出全新的创意工具,让艺术家和设计师能够更加自由地表达他们的创意想法。无论是建筑、产品设计还是角色动画,Maxon Cinema 4D 2024

4D毫米波雷达和3D雷达、激光雷达全面对比
众所周知,传统3D毫米波雷达存在如下性能缺陷: 1)静止目标和地物杂波混在一起,难以区分; 2) 横穿车辆和行人多普勒为零或很低,难以检测; 3) 高处物体和地面目标不能区分,容易造成误刹,影响安全性; 4) 角度分辨率低,远处目标位置精度低,误差大; 5) 点云稀疏,难以识别目标类型。
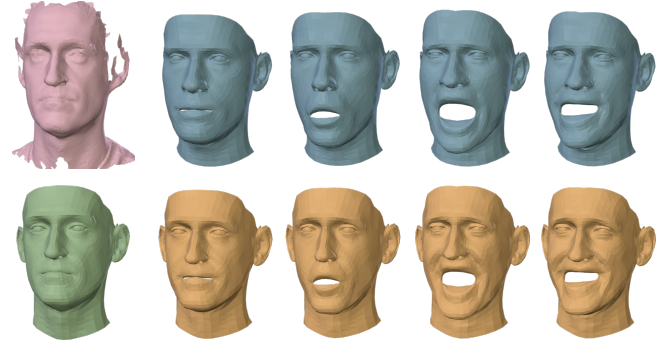
【计算机视觉|人脸建模】学习从4D扫描中获取的面部形状和表情的模型
本系列博文为深度学习/计算机视觉论文笔记,转载请注明出处 标题:Learning a model of facial shape and expression from 4D scans 链接:Learning a model of facial shape and expression from 4D scans | ACM Transactions on Graphics Per
适用于4D毫米波雷达的目标矩形框聚类
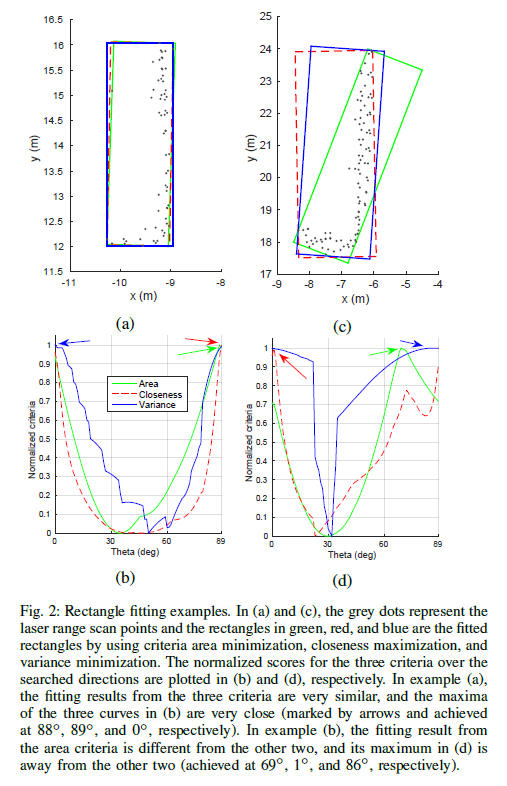
目录 一、前言 二、点云聚类分割 三、基于方位搜索L型拟合 四、评价准则之面积最小化 五、评价准则之贴合最大化 六、评价准则之方差最小化 一、前言 对于多线束雷达可以获取目标物体更全面的面貌,在道路中前向或角雷达可能无法获取目标车矩形框但可以扫到两边或者一边,在做目标方向估计时这些信息至关重要。看到一篇文章不错的思路,拿来记录借鉴下。 整体算法: Step1:

22款迈巴赫S480升级主动氛围灯、电动后门,4D旋转高音
梅赛德斯-迈巴赫S级轿车秉承“礼”道, 匠心打造典雅外观,精心雕琢考究细节, 目之所至备显尊崇。迈巴赫专属设计语言 - 自成一派的豪华标杆,再度迎来全新蜕变。在贯穿发动机舱盖的镀铬筋线前端,三叉星徽立标熠熠生辉,与迈巴赫专属保险杠和经典进气格栅共同凝聚成庄重典雅的前脸造型。 本次迈卡库阿忠介绍的是云南上门安装的迈巴赫S480升级原厂主动氛围灯,4D旋转高音,电动后门,更多科技体验,更豪

23款奔驰S450发烧友升级原厂4D大柏林之声音响,狂飙的音乐厅
大家好,我是小志bzs878,专注名车原厂升级,欢迎戳戳右上角“+”号关注一下,持续为您带来精彩改装案例 4D大柏林之声音响,全车一共配备31个扬声器,8个座椅振荡器,1大1小的功放,全套音响输出功率1750W,分布在整车从主驾驶脚坑到后备箱的每个位置。 先来看看这满满的配件,车上中高低音全覆盖,让你在车内享受演唱会现场般的豪华体验。 原厂4D大柏林之声音响系统有多种音效,自然、环绕

【论文笔记】Point Cloud Forecasting as a Proxy for 4D Occupancy Forecasting
原文链接:https://arxiv.org/abs/2302.13130 1. 引言 运动规划需要预测其余物体的运动,但相应的感知模块如建图、目标检测、跟踪和轨迹预测通常都需要大量人力标注HD地图、语义标签、边界框或物体的轨迹,难以扩展到大型无标签数据集上。3D点云预测是一种自监督方法,但其算法隐式地捕捉传感器的外参(自车运动)、内参(激光雷达的采样模式)和其余物体的形状与运动。但自动驾驶系