本文主要是介绍如何确定压电晶体仿真comsol旋转坐标系中的欧拉角,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
如何确定comsol旋转坐标系中的欧拉角?
1. 压电晶体的切向
切向的表示方式主要有两种方式,数字在前或者在后。
在前: 42° Y-X LiNbO3 ,表示:
切面法向: 与Y轴夹角为42°, 与x轴方向成右手螺旋关系,绕X轴。
切面中波的传播方向:X轴与切面平行,为saw(瑞利波或者勒夫波)的传播方向。
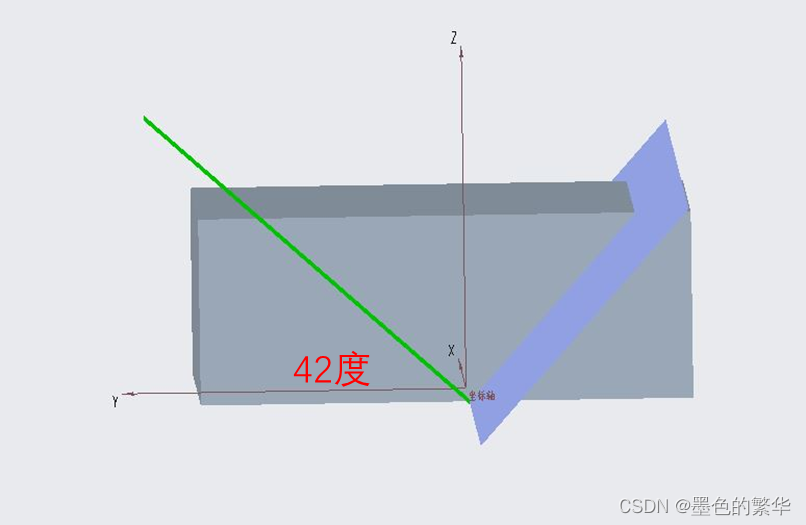
蓝色: 切面 绿色:切面法向 X轴: 波的传输方向
在后: Y-112° X LiNbO3 ,表示:
切面法向: 为Y轴。
切面中波的传播方向:X轴与切面平行,为saw(瑞利波或者勒夫波)的传播方向,相当于模拟仿真中的x方向,112°为X轴和传播方向夹角,绕Y轴。
 蓝色: 切面 Y轴:切面法向 橙色:波的传输方向
蓝色: 切面 Y轴:切面法向 橙色:波的传输方向
2. 压电晶体的切向与COMSOL中的旋转关系
COMSOL中的欧拉变换时安装Z-X-Z的方式变换
三维:
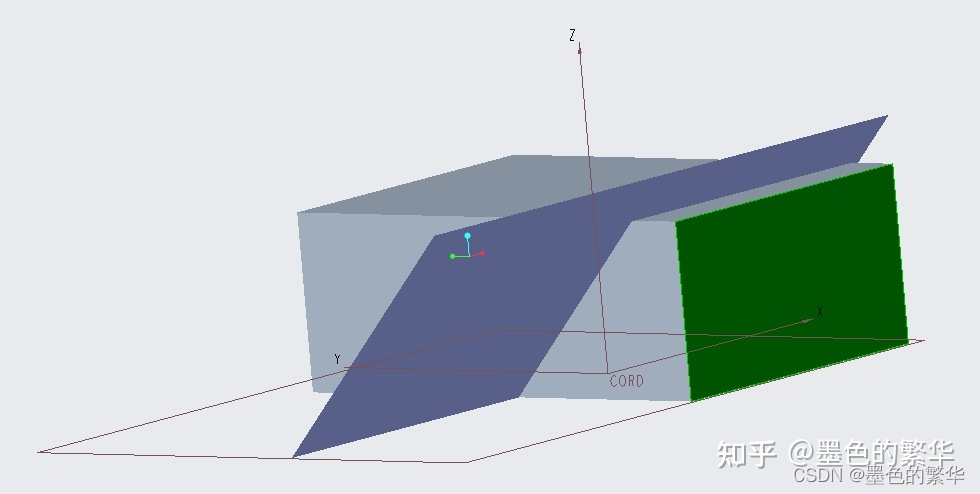
旋转坐标系中的欧拉角就是把切面旋转到坐标系原始位置的大小:如图。
 蓝色: 切面 绿色:原始位置 注意传播方向必须为x轴
蓝色: 切面 绿色:原始位置 注意传播方向必须为x轴
 只要绕X轴旋转即可
只要绕X轴旋转即可
要使得蓝色的面旋转到绿色的面(XY面或者平行面),同时波的传播方向为X轴。
欧拉旋转: Z - X - Z
角度: 0° 48° 0°
二维:
由于二维只有x y 维度,y为厚度,旋转坐标系中的欧拉角就是把切面旋转到坐标系原始位置(XZ面或者平行面)的大小:如图。
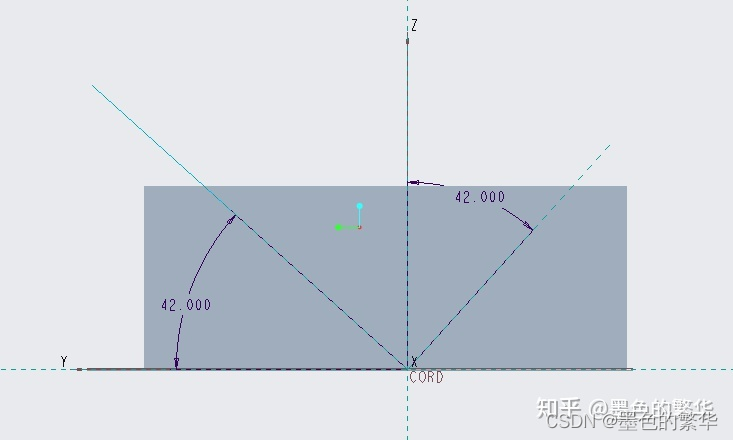
要使得蓝色的面旋转到绿色的面(XZ面或者平行面),同时波的传播方向为X轴。
欧拉旋转: Z - X - Z
角度: 0° -42° 0°
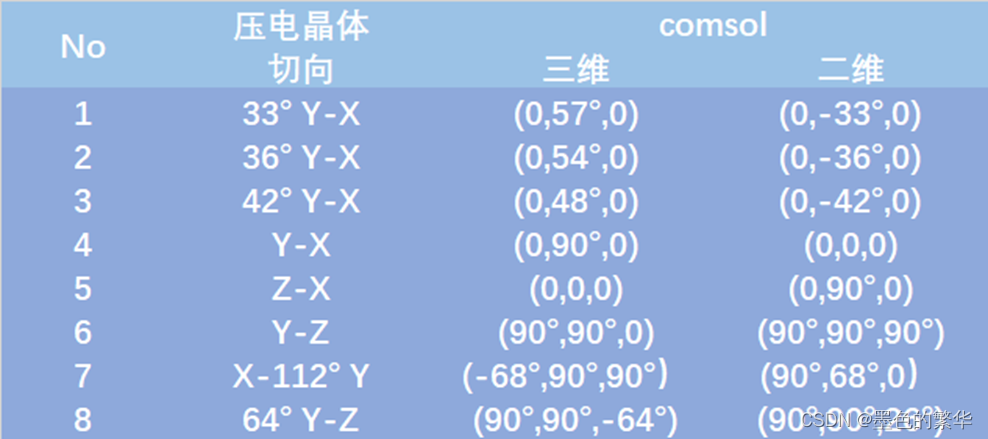
3. 其他复杂情况如下表格
这篇关于如何确定压电晶体仿真comsol旋转坐标系中的欧拉角的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







