本文主要是介绍【Ubuntu】Ubuntu18.04配置ros+创建ros工作空间+激光点云路面分割实验步骤,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
1、配置ros环境
2、创建ros工作空间
3、激光点云路面分割实验步骤
1、配置ros环境
(1)首先在创建虚拟机的时候最好将内存设置为70G,以防后面内存不足

(2)启动虚拟机,设置软件的更新源
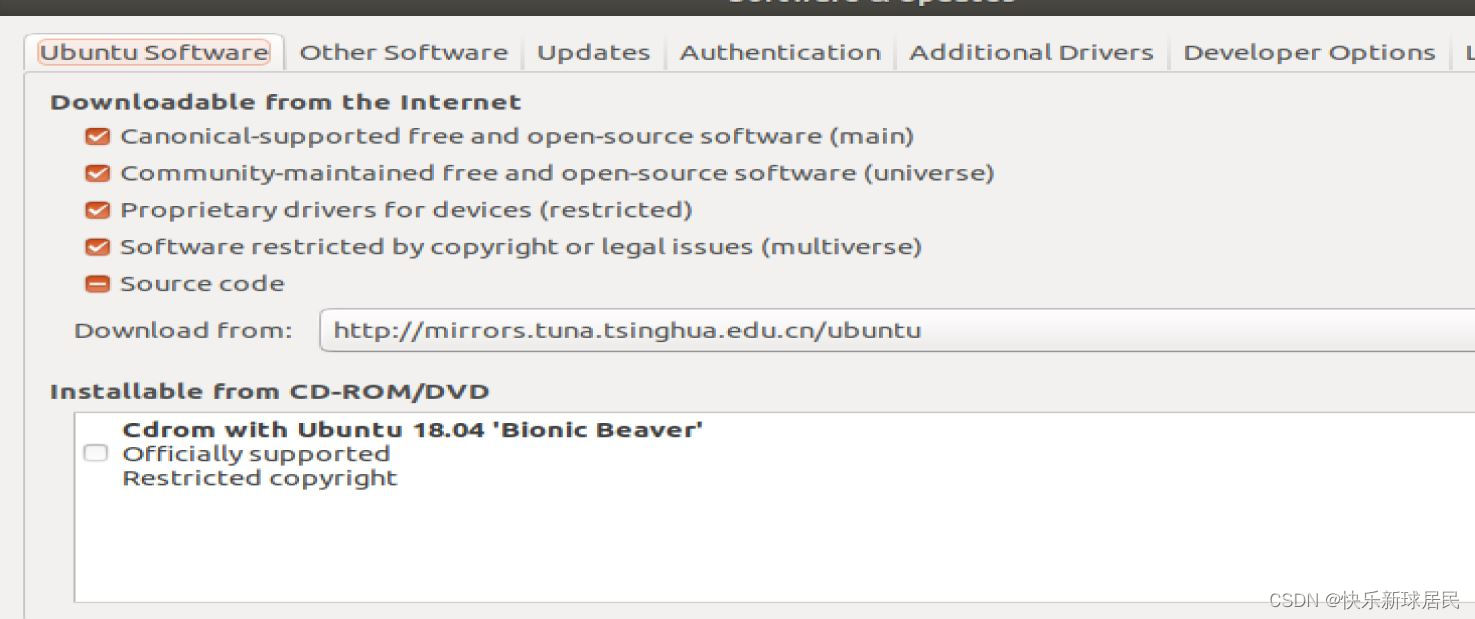
(3)设置下载源:按照顺序输入以下命令
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
(4)更新
sudo apt update
(5)安装ros:注意版本,因为我的Ubuntu是18.04;所以是melodic;这个安装过程时间比较长,如果网络不好下载也可能会报错
sudo apt install ros-melodic-desktop-full
(6)设置环境变量
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrcsource ~/.bashrc(7)下载其他的功能组件,这里可能要注意一下自己的python版本,python表示的是python版本是二点几的;如果版本是三点几就应该是python3
sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential
(8) rosdep init 初始化
sudo rosdep init
如果出现不能下载或者超时的错误请执行接下来的步骤(没有出现错误就可以直接到第(9)步):
a、进入hosts文件
sudo gedit /etc/hosts在文件后面添加(注意不要删除原来的内容,直接在后面添加),这个操作在安装ros完成后可以将添加的内容删除,因为可能会影响到git clone 外网的资料
199.232.28.133 raw.githubusercontent.com
192.30.253.118 gist.github.com
185.199.110.153 github.io
151.101.113.194 github.global.ssl.fastly.net
52.216.227.168 github-cloud.s3.amazonaws.com
52.74.223.119 github.com
199.232.28.133 avatars1.githubusercontent.com
199.232.28.133 avatars2.githubusercontent.com
199.232.28.133 avatars0.githubusercontent.com
199.232.28.133 avatars3.githubusercontent.com
199.232.28.133 user-images.githubusercontent.com
199.232.28.133 avatars.githubusercontent.com
199.232.28.133 github.map.fastly.net
199.232.28.133 avatars7.githubusercontent.com
54.239.31.69 aws.amazon.com
54.239.30.25 console.aws.amazon.com
54.239.96.90 ap-northeast-1.console.aws.amazon.com
54.240.226.81 ap-southeast-1.console.aws.amazon.com
54.240.193.125 ap-southeast-2.console.aws.amazon.com
54.239.54.102 eu-central-1.console.aws.amazon.com
177.72.244.194 sa-east-1.console.aws.amazon.com
176.32.114.59 eu-west-1.console.aws.amazon.com
54.239.31.128 us-west-1.console.aws.amazon.com
54.240.254.230 us-west-2.console.aws.amazon.com
54.239.38.102 s3-console-us-standard.console.aws.amazon.com
54.231.49.3 s3.amazonaws.com
52.219.0.4 s3-ap-northeast-1.amazonaws.com
54.231.242.170 s3-ap-southeast-1.amazonaws.com
54.231.251.21 s3-ap-southeast-2.amazonaws.com
54.231.193.37 s3-eu-central-1.amazonaws.com
52.218.16.140 s3-eu-west-1.amazonaws.com
52.92.72.2 s3-sa-east-1.amazonaws.com
54.231.236.6 s3-us-west-1.amazonaws.com
54.231.168.160 s3-us-west-2.amazonaws.com
52.216.80.48 github-cloud.s3.amazonaws.com
54.231.40.3 github-com.s3.amazonaws.com
52.216.20.171 github-production-release-asset-2e65be.s3.amazonaws.com
52.216.228.168 github-production-user-asset-6210df.s3.amazonaws.comb、进入resolv.conf文件
sudo gedit /etc/resolv.conf将文件里面原有的nameserver注释掉(用#注释哦)然后添加上以下的语句
nameserver 8.8.8.8
nameserver 8.8.4.4 经过以上步骤再执行下面的语句:
sudo rosdep init如果显示 rosdep update就表示成功了
(9)更新rosdep
rosdep update可能会出现超时错误,那么请执行以下步骤:
a、下载下面这个文件
链接:https://pan.baidu.com/s/1tzAsAN48_uVfPMSgBN5fxA
提取码:cu0w
b、然后放入到/etc/ros路径下;如图所示
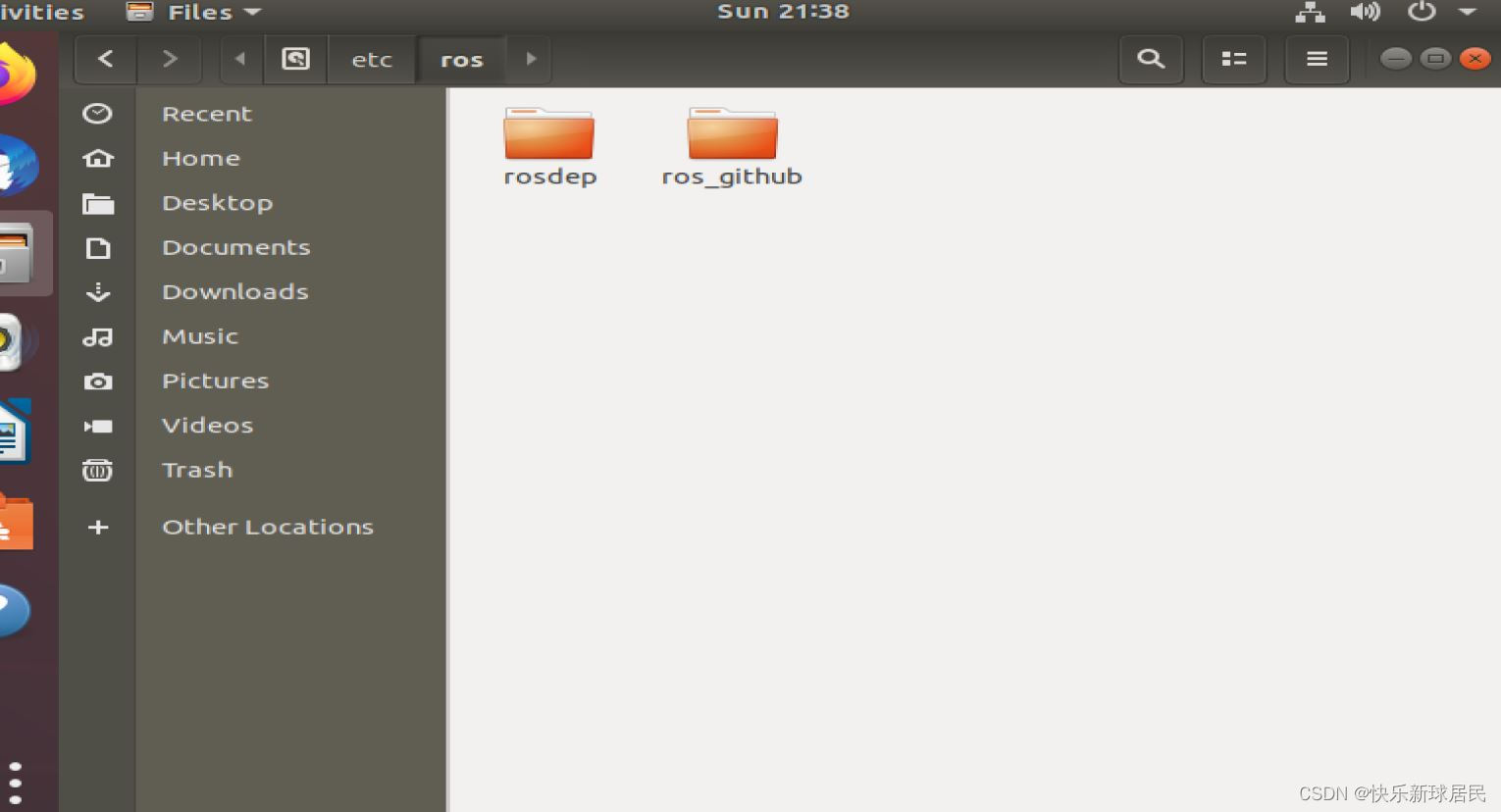
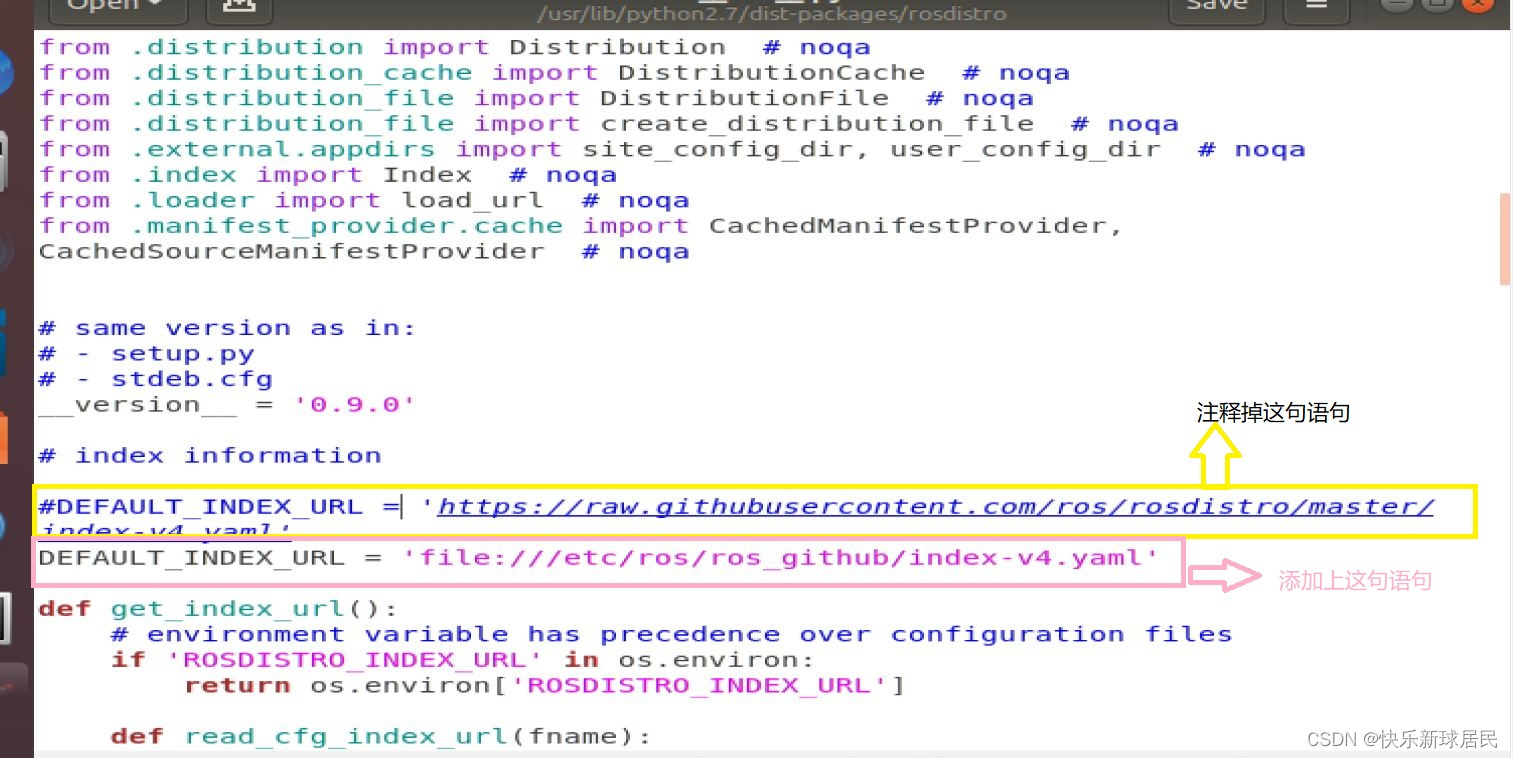
c、输入下列命令
sudo gedit /usr/lib/python2.7/dist-packages/rosdistro/__init__.py然后对文件进行以下的修改(记得保存文件哦):
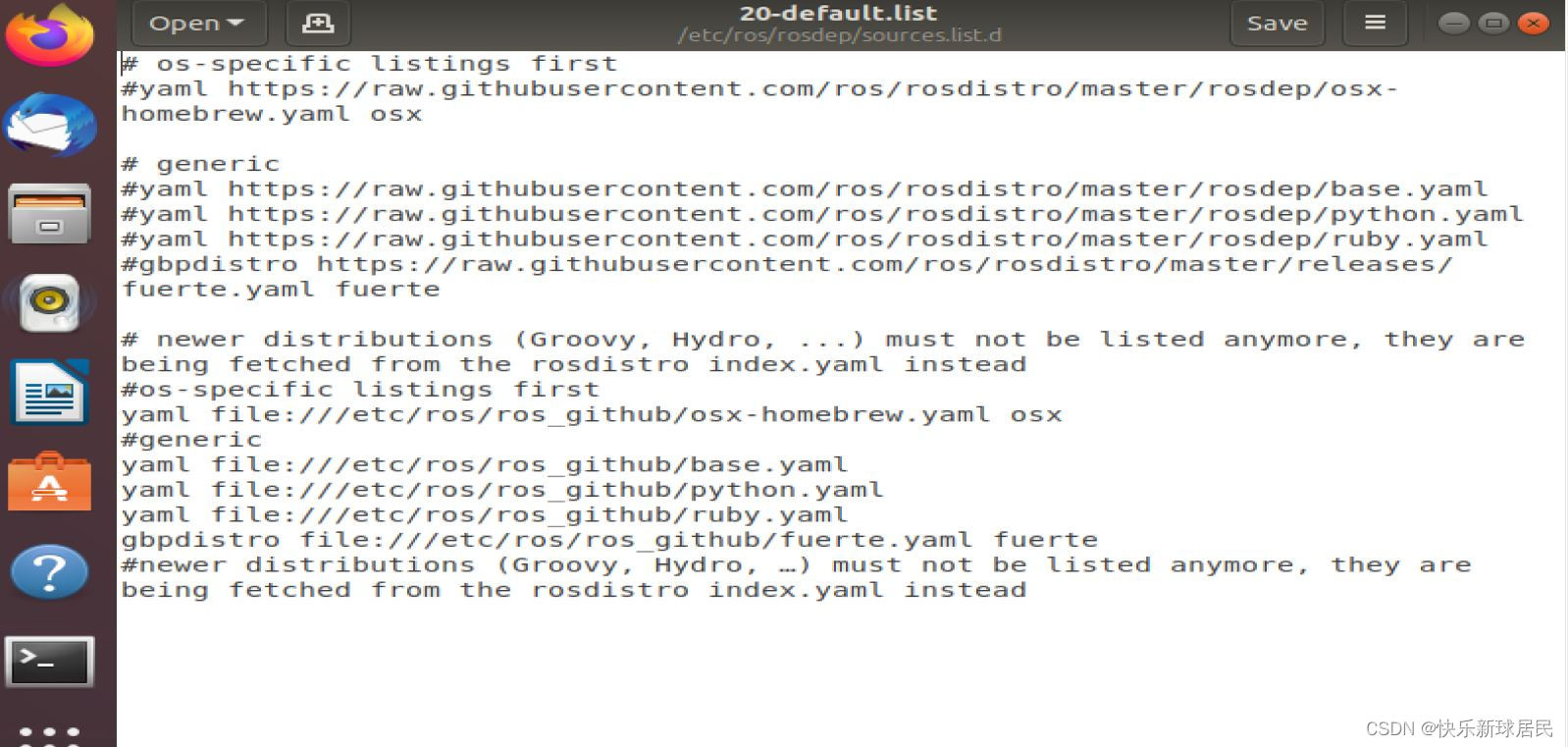
d、输入以下语句
sudo gedit /etc/ros/rosdep/sources.list.d/20-default.liste、然后对文件进行如下修改:首先将原有的内容注释掉;添加以下的语句(记得保存文件哦)
#os-specific listings first
yaml file:///etc/ros/ros_github/osx-homebrew.yaml osx
#generic
yaml file:///etc/ros/ros_github/base.yaml
yaml file:///etc/ros/ros_github/python.yaml
yaml file:///etc/ros/ros_github/ruby.yaml
gbpdistro file:///etc/ros/ros_github/fuerte.yaml fuerte
#newer distributions (Groovy, Hydro, …) must not be listed anymore, they are being fetched from the rosdistro index.yaml instead修改后的文件如图所示:
最后再执行一次,如果没有报错就没有问题啦
rosdep update(10)最后运行小乌龟检测一下是否安装成功吧
打开第一个终端,输入
roscore再打开一个终端,输入
rosrun turtlesim turtlesim_node最后再打开一个终端,输入
rosrun turtlesim turtle_teleop_key记得要把鼠标箭头移入到第二个终端界面,然后再点击上下左右键,小乌龟就可以动了
2、创建ros工作空间
在桌面打开一个终端依次输入以下命令:
(1)创建
mkdir -p ~/catkin_ws/srccd ~/catkin_ws/src
catkin_init_workspace(2)编译整个工作空间
cd ~/catkin_ws/catkin_make(3)使用source命令,让工作空间中的环境变量生效
source devel/setup.bash
为了确保生效,可以通过以下命令进行检查;如果打印的路径包含当前的工作空间路径则设置成功
echo $ROS_PACKAGE_PATH(4)创建功能包
cd ~/catkin_ws/srccatkin_create_pkg_ learning_communication std_msgs rospy roscppcd ~/catkin_wscatkin_makesource ~/catkin_ws/devel/setup.bash创建完成后就可以在catkin_ws文件夹下看到如下的文件:
3、激光点云路面分割实验步骤
(1)首先将我们所需要的文件下载下来(可以打开网页先下载到U盘再拖入到虚拟机中)
https://github.com/shuming1998/AT128_ground_remove_JPC
也可以直接在虚拟机的终端输入进行下载
sudo git clone https://github.com/shuming1998/AT128_ground_remove_JPC还有一个文件
链接:https://pan.baidu.com/s/1upKPXdEerZDZw4bQZyNrIA
提取码:khvm
下载好以上两个文件后解压后放入到catkin_ws的src文件夹里面(可以先给文件重命名),如下

(2)编译一下
cd ~/catkin_ws/catkin_make(3)打开一个终端输入
roscore
(4)再打开一个终端输入
cd ~/catkin_wssource devel/setup.bashrosrun at128_jpc at128_jpc(5)再打开一个终端
因为我的bag包的路径是/catkin_ws/src/AT128;所以需要根据自己的路径进入到bag包的路径下打开终端再输入以下命令
rosbag play AT128.bag
(6)最后再打开一个终端输入
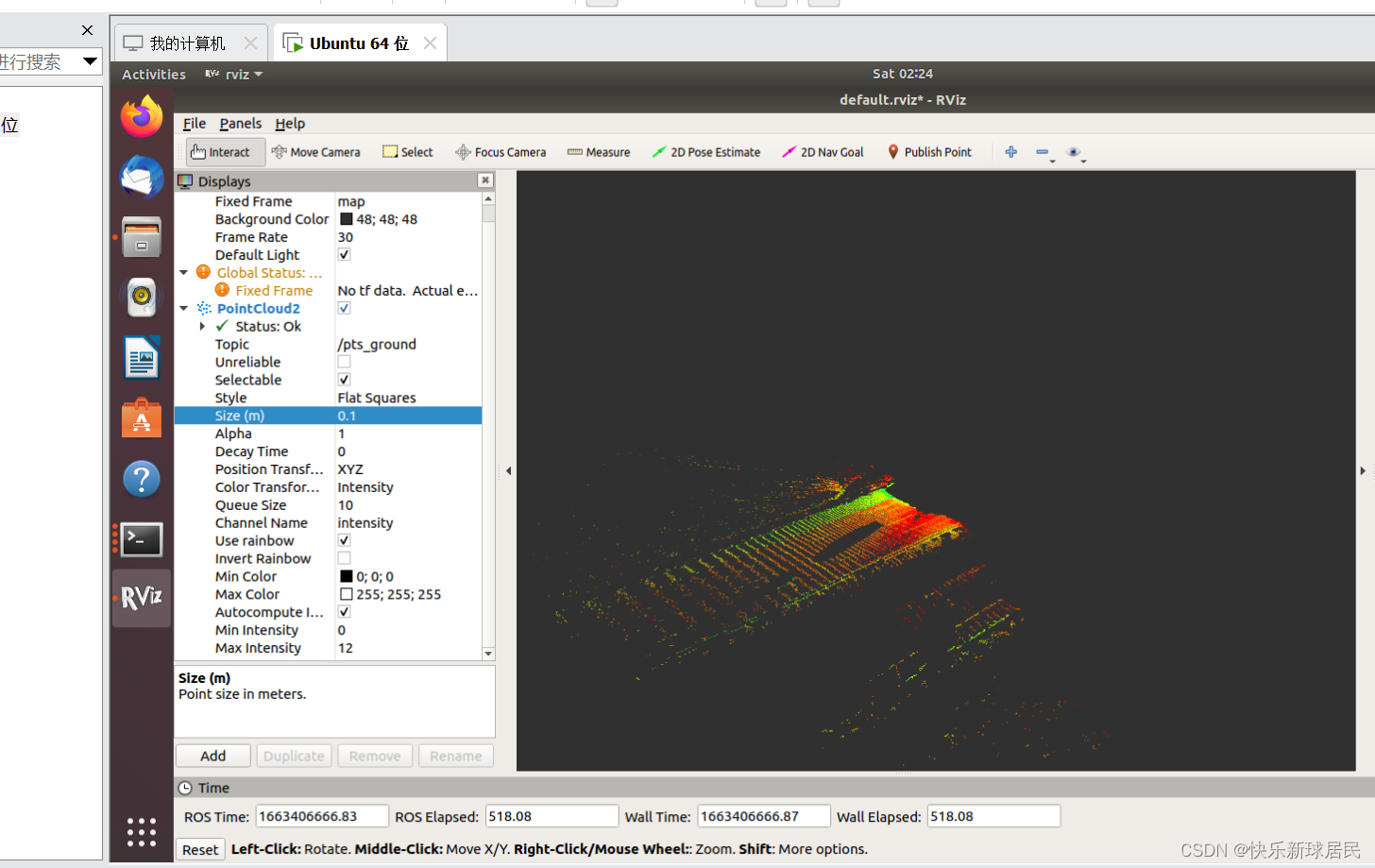
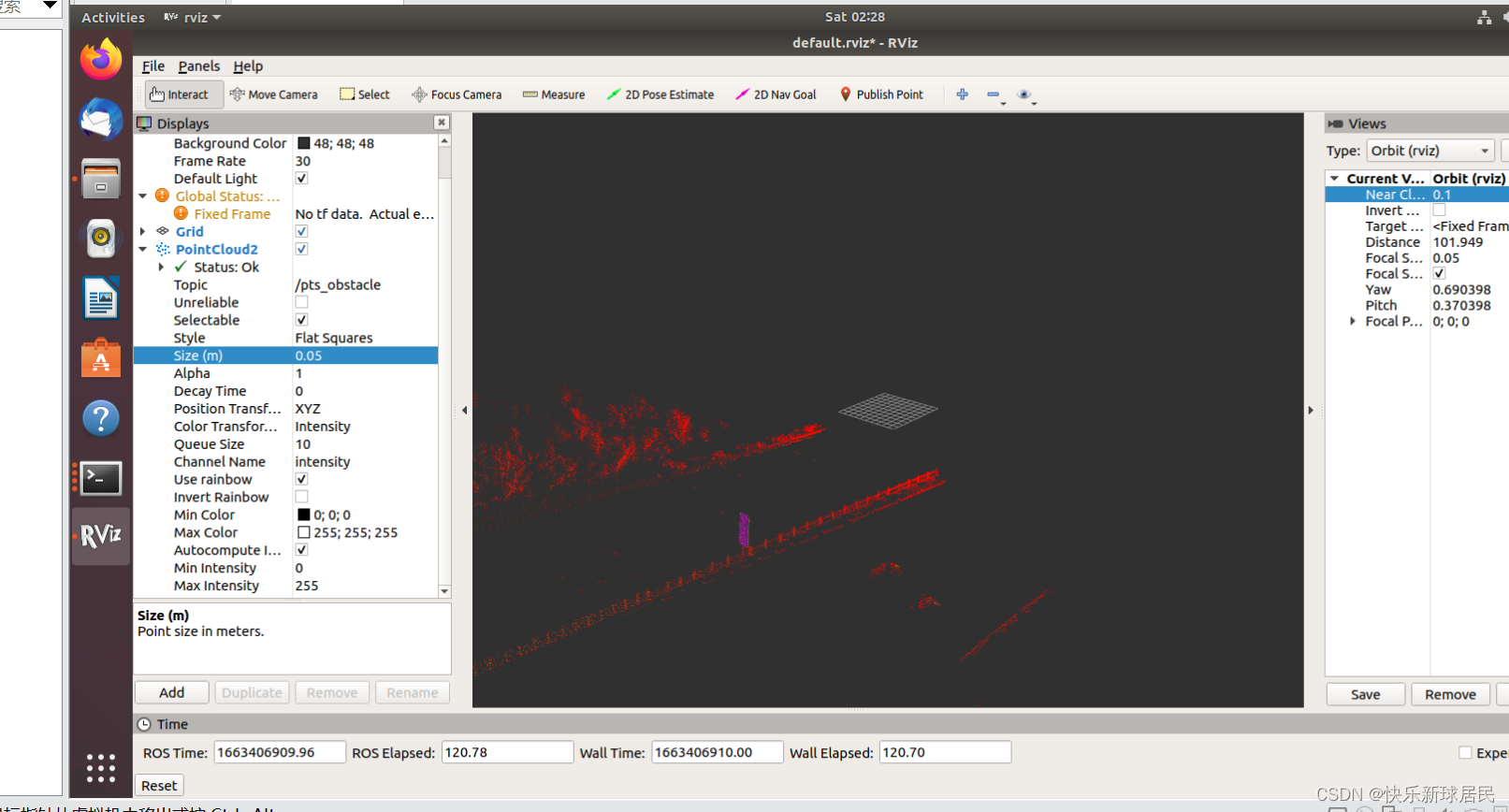
rviz然后点击rviz的add选项,在 by topic中选择pts_ground和pts_obstacle;其中pts_ground为分割的地面点,pts_obstacle为分割的障碍物点;我是分开添加的,这样更清晰,也可以两个一起添加,然后调节一下参数让图像更清晰;(因为前面的终端运行的文件是有时间限制的,运行完就停止了,如果你打开rviz一段时间后没有画面了,就需要重新运行一下前面rosrun的步骤)
以上步骤我操作过好几次没有问题,但是也不排除出现其他问题,大家还可以搜索一下网上的资料来解决相应的问题!!!!!
这篇关于【Ubuntu】Ubuntu18.04配置ros+创建ros工作空间+激光点云路面分割实验步骤的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






