本文主要是介绍详细介绍如何使用Ipopt非线性求解器求解带约束的最优化问题,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
本文中将详细介绍如何使用Ipopt非线性求解器求解带约束的最优化问题,结合给出的带约束的最优化问题示例,给出相应的完整的C++程序,并给出详细的解释和注释,以及编译规则等
一、Ipopt库的安装和测试
本部分内容在之前的文章《Ubuntu20.04安装Ipopt的流程介绍及报错解决方法(亲测简单有效)》中已经详细介绍过了,链接如下:
https://blog.csdn.net/qq_44339029/article/details/133679131
二、使用Ipopt非线性求解器求解带约束的最优化问题的程序示例
0、明确要求解的带约束的最优化问题
首先,我们来看一个简单的带约束的最优化问题,其包含两个不等式约束和1个等式约束,详情如下:
f = ( x 1 − 10.24 ) 2 + 5.21 x 2 + 9.9 ( x 3 − x 4 ) 2 f=(x_1-10.24)^2+5.21x_2+9.9(x_3-x_4)^2 f=(x1−10.24)2+5.21x2+9.9(x3−x4)2
g 1 : 2 ≤ x 3 − x 4 ≤ 10 g 2 : 2.99 ≤ x 2 ≤ 100 g 3 : x 2 = x 4 \begin{aligned}g_1 & : & 2\leq x_3-x_4\leq10\\ g_2 & : & 2.99\leq x_2\leq100\\ g_3 & : & x_2=x_4\end{aligned} g1g2g3:::2≤x3−x4≤102.99≤x2≤100x2=x4
其中 x 1 x_1 x1、 x 2 x_2 x2、 x 3 x_3 x3、 x 4 x_4 x4的取值范围均为0~100,易知使得上述目标函数 f f f取值最小的解为:10.24、2.99、4.99、2.99。
下面介绍,如何编程使用Ipopt非线性求解器求解该问题
1. 引入头文件和命名空间:
#include <iostream>
#include <cassert>
#include <cppad/ipopt/solve.hpp>
using CppAD::AD;
引入必要的C++头文件,包括iostream(用于输入输出),cassert(用于C风格的assert)以及cppad/ipopt/solve.hpp(用于Ipopt求解器和CppAD库的接口)。然后在一个匿名的命名空间中引入了AD类型,这是CppAD库中用于自动微分(Automatic Differentiation)的数据类型。
2. 定义FG_eval类:
namespace {class FG_eval {public:typedef CPPAD_TESTVECTOR(AD<double>) ADvector;void operator()(ADvector& fg, const ADvector& x) {// ...}};
}
在匿名命名空间中,定义一个FG_eval类,用于计算目标函数和约束条件的值。这个类也是调用使用CppAD和Ipopt库所需的最重要的接口,这个类中的operator()函数是用于计算问题的目标函数和约束条件的核心部分。它接受两个向量:fg用于存储目标函数值和约束条件值,x用于存储优化变量。
3. 定义operator()函数:
接下来,我们根据第0步中明确的目标函数及约束条件来编写核心的operator函数,示例如下:
void FG_eval::operator()(ADvector& fg, const ADvector& x) {assert(fg.size() == 4);assert(x.size() == 4);AD<double> x1 = x[0];AD<double> x2 = x[1];AD<double> x3 = x[2];AD<double> x4 = x[3];fg[0] = (x1 - 10.24) * (x1 - 10.24) + 5.21 * x2 + 9.9 * (x3 - x4) * (x3 - x4);fg[1] = x3 - x4;fg[2] = x2;fg[3] = x2 - x4;// 打印计算结果std::cout << "fg[0]:" << fg[0] << std::endl;std::cout << "fg[1]:" << fg[1] << std::endl;std::cout << "fg[2]:" << fg[2] << std::endl;std::cout << "fg[3]:" << fg[3] << std::endl;
}
operator()函数接受fg和x向量,然后根据问题的定义计算目标函数和约束条件的值,并将它们存储在fg向量中。同时,它也打印出这些值, 其中fg[0]即为目标函数表达式、fg[1]、fg[2]、fg[3]中依次对应了第0步中设定的三个约束,不等式约束直接写即可,等式约束的等式左右两边同时减去右边的项,使等式右边变为0。
4. 定义主函数get_started(该函数名字可任取):
定义一个主函数,设定自变量的初始值,以及自变量和约束的上下限,设定和提供调用Ipopt非线性求解器求解所需要的变量,然后调用求解器进行求解,并进行验证等操作,程序示例如下:
bool get_started(void)
{ bool ok = true;size_t i;typedef CPPAD_TESTVECTOR( double ) Dvector;size_t nx = 4;size_t ng = 3;Dvector xi(nx);xi[0] = 10.0;xi[1] = 5.0;xi[2] = 5.0;xi[3] = 100.0;Dvector xl(nx), xu(nx);for(i = 0; i < nx; i++){ xl[i] = 0;xu[i] = 100;}Dvector gl(ng), gu(ng);gl[0] = 2; gu[0] = 10;gl[1] = 2.99; gu[1] = 100;gl[2] = 0; gu[2] = 0;FG_eval fg_eval;std::string options;options += "Integer print_level 0\n";options += "String sb yes\n";options += "Integer max_iter 10\n";options += "Numeric tol 1e-6\n";options += "String derivative_test second-order\n";options += "Numeric point_perturbation_radius 0.\n";CppAD::ipopt::solve_result<Dvector> solution;CppAD::ipopt::solve<Dvector, FG_eval>(options, xi, xl, xu, gl, gu, fg_eval, solution);ok &= solution.status == CppAD::ipopt::solve_result<Dvector>::success;double check_x[] = { 10.24, 2.99, 4.99, 2.99 }; double rel_tol = 1e-6; // relative tolerancedouble abs_tol = 1e-6; // absolute tolerancefor(i = 0; i < nx; i++){ ok &= CppAD::NearEqual(check_x[i], solution.x[i], rel_tol, abs_tol ); std::cout << "x[" << i << "] = " << solution.x[i] << std::endl;}return ok;
}
以下是程序的详细解释:
(1). bool get_started(void):程序逻辑流程的主要函数,get_started函数定义了问题的基本参数,如变量数量、约束数量、变量的初始值,以及变量和约束的上下界。然后,它创建了一个FG_eval对象来计算目标函数和约束条件,设置了Ipopt求解器的选项,并最终调用求解器来解决问题。
(2). bool ok = true;:定义一个布尔变量 ok,用于表示问题是否成功求解。一开始将其初始化为 true。
(3). 类型别名 Dvector:通过 typedef CPPAD_TESTVECTOR(double) Dvector; 定义了一个 Dvector 类型,它是CppAD库中的向量类型,用于存储双精度(double)数值。
(4). size_t nx = 4;:定义一个 size_t 类型的变量 nx,表示问题中独立变量(自变量)的数量,即问题的变量维度。在这个示例中,有4个独立的自变量。
(5). size_t ng = 3;:定义一个 size_t 类型的变量 ng,表示问题中的约束数量,即约束的维度。在这个示例中,有3个约束条件。
(6). 创建 Dvector 向量 xi:用于存储问题的独立变量(自变量)。这个向量有4个元素,对应于4个自变量。
(7). 设置初始猜测值 xi:为 xi 向量中的每个元素分别赋初值,为检验算法性能,这里设定了一个较差的初始值。
- `xi[0] = 10.0;`- `xi[1] = 5.0;`- `xi[2] = 5.0;`- `xi[3] = 100.0;`
(8). 定义变量和约束条件的上下界:
- 创建 Dvector 向量 xl 和 xu,它们分别表示变量的下界和上界,并根据第0步中的设定的自变量的取值范围0~100进行设定
- 创建 Dvector 向量 gl 和 gu,它们分别表示约束条件的下界和上界,并根据第0步中,三个约束的进行设定,对于前两个不等式约束,直接设定即可,第三个等式约束,即 x 2 − x 4 = 0 x_2-x_4=0 x2−x4=0,因此,上下限均设为0即可。
(9). 创建 FG_eval 类的对象 fg_eval:FG_eval 即我们第二步中设定的类,用于计算目标函数和约束条件的值。这是问题的目标函数和约束条件的具体定义。
(10). 创建字符串 options:用于存储Ipopt求解器的选项,包括设置输出级别、最大迭代次数、收敛容差等,详情如下所示:
- `options += "Integer print_level 0\n";`:将输出级别设置为0,以关闭求解器的详细输出,只打印关键信息。- `options += "String sb yes\n";`:使用平衡约束优化方法。- `options += "Integer max_iter 10\n";`:设置最大迭代次数为10次。- `options += "Numeric tol 1e-6\n";`:设置迭代停止的收敛容差为1e-6。- `options += "String derivative_test second-order\n";`:启用二阶导数测试,用于检查目标函数和约束条件的导数是否正确。- `options += "Numeric point_perturbation_radius 0.\n";`:将随机扰动的半径设置为0,表示不使用扰动进行数值近似求导。
(11). 创建 CppAD::ipopt::solve_result<Dvector> solution;:用于存储求解结果的对象。
(12). 调用 CppAD::ipopt::solve 函数:使用Ipopt求解器解决非线性规划问题。传递了问题选项、独立变量的初始值、变量的上下界、约束条件的上下界、问题的定义(fg_eval 对象),以及存储结果的 solution 对象。
(13). 检查求解器的状态:如果状态为成功(success),则将 ok 变量保持为真,表示问题已成功求解。
注:下面的第(14)~(16)部分,是为了验证求解是否正确,为非必要步骤
(14) 创建 check_x 数组:包含问题的精确解。这些值是问题的已知精确解。
(15). 设置相对容差和绝对容差的阈值:这些值用于控制验证解的精度。
(16). 遍历问题中的每个变量,进行解的验证:使用 CppAD::NearEqual 函数来比较问题的解与精确解是否足够接近。如果它们的差距在相对容差和绝对容差的范围内,ok 变量将保持为真,并打印每个变量的解。
(17).返回 ok 变量:表示问题是否成功求解。
5. C++主函数main:
int main(void) {std::cout << "===== Ipopt with CppAD Testing =====" << std::endl;bool result = get_started();std::cout << "Final checking: " << result << std::endl;
}
main函数是程序的入口点,它简单地调用get_started函数来执行非线性规划问题的求解,并打印结果。
6. ☆☆☆带详细注释的完整程序`☆☆☆
# include <iostream>
// C style asserts
# include <cassert>
// 包含Ipopt求解器头文件
# include <cppad/ipopt/solve.hpp>// 在一个匿名的命名空间中,引入了一个AD类型,它是CppAD库中用于自动微分(Automatic Differentiation)的数据类型。AD类型可以用来表示变量和函数,使其具备微分能力。
namespace {using CppAD::AD;class FG_eval {public:typedef CPPAD_TESTVECTOR( AD<double> ) ADvector;// fg: function that evaluates the objective and constraints using the syntax// 定义一个函数运算符,用于计算目标函数和约束条件的值void operator()(ADvector& fg, const ADvector& x){ //使用assert来设定fg和x的大小,以确保它们与问题的维度匹配//fg 向量用于存储目标函数值和约束条件值,x向量用于存储优化变量assert( fg.size() == 4 );assert( x.size() == 4 );// 将 x 中的优化变量分配给 AD 类型的变量 x1 到 x4。这是在使用C++ Algorithmic Differentiation(CppAD)时定义问题中的独立变量的方式。AD<double> x1 = x[0];AD<double> x2 = x[1];AD<double> x3 = x[2];AD<double> x4 = x[3];// 计算目标函数的值,将其存储在 fg[0] 中。这里使用了 x1 到 x4 这些 AD 类型的变量,这意味着这个表达式将被自动微分,以便后续的梯度计算。fg[0] = (x1-10.24) * (x1-10.24) + 5.21*x2 + 9.9*(x3-x4)*(x3-x4);// 分别计算三个约束条件的值,并将它们存储在 fg[1] 和 fg[2]、 fg[3]中。fg[1] = x3-x4;fg[2] = x2;fg[3] = x2-x4;//std::cout << "fg[0]:" << fg[0]<< std::endl;std::cout << "fg[1]:" << fg[1]<< std::endl;std::cout << "fg[2]:" << fg[2]<< std::endl;std::cout << "fg[3]:" << fg[3]<< std::endl;return;}};
}// 该函数用于设置和解决非线性规划问题
// 它首先定义了问题的一些基本参数,如变量数量、约束数量、变量的初始值、变量和约束的上下界等
// 然后创建一个FG_eval对象用于计算目标函数和约束条件
// 最后,使用CppAD::ipopt::solve函数来解决问题,并将结果存储在solution中
bool get_started(void)
{ bool ok = true;size_t i;// 创建了一个类型别名 Dvector,它是CppAD库中的一个向量类型,用于存储双精度(double)数值。这个向量类型是CppAD库的一部分,通常用于存储问题的变量、约束和其他向量。typedef CPPAD_TESTVECTOR( double ) Dvector;// 声明了一个 size_t 类型的变量 nx,它表示问题中独立变量(自变量)的数量,也就是问题的变量维度。在这个示例中,有4个独立变量,因此 nx 的值为4。size_t nx = 4;// 声明了一个 size_t 类型的变量 ng,它表示问题中的约束数量,也就是约束的维度。在这个示例中,有3个约束条件,因此 ng 的值为3。size_t ng = 3;// 创建了一个名为 xi 的 Dvector 类型的向量,用于存储问题的独立变量(自变量)。这个向量有4个元素,对应于4个自变量。Dvector xi(nx);// 分别为这4个独立变量设置了初始值。这些值将用作问题的初始猜测,作为非线性规划求解器的起点。xi[0] = 10.0;xi[1] = 5.0;xi[2] = 5.0;xi[3] = 100.0;//设置问题的变量(自变量)和约束条件的上下界(限制条件)。Dvector xl(nx), xu(nx);for(i = 0; i < nx; i++){ xl[i] = 0;xu[i] = 100;}Dvector gl(ng), gu(ng);gl[0] = 2; gu[0] = 10;gl[1] = 2.99; gu[1] = 100;gl[2] = 0; gu[2] = 0;// 创建了 FG_eval 类的对象 fg_eval,用于计算目标函数和约束条件的值。这是问题的目标函数和约束条件的具体定义。FG_eval fg_eval;// 创建了一个字符串 options,用于存储Ipopt求解器的选项。std::string options;// 设置了求解器选项,将 print_level 参数设置为0,以关闭求解器的输出,即不会在控制台打印详细信息,只打印关键信息。options += "Integer print_level 0\n";// 将 sb 参数设置为 "yes",这表示使用平衡约束优化方法。options += "String sb yes\n";// 设置最大迭代次数为10次。options += "Integer max_iter 10\n";// approximate accuracy in first order necessary conditions;// see Mathematical Programming, Volume 106, Number 1,// Pages 25-57, Equation (6)// 设置迭代停止的收敛容差为1e-6。options += "Numeric tol 1e-6\n";// 启用了二阶导数测试,用于检查目标函数和约束条件的导数是否正确。options += "String derivative_test second-order\n";// maximum amount of random pertubation; e.g.,// when evaluation finite diff// 将随机扰动的半径设置为0,表示不使用扰动进行数值近似求导。options += "Numeric point_perturbation_radius 0.\n";// 创建了一个用于存储求解结果的对象 solution,CppAD::ipopt::solve_result<Dvector> solution;// 调用了 CppAD::ipopt::solve 函数,用于解决非线性规划问题。它传递了问题选项、独立变量的初始值、变量的上下界、约束条件的上下界、问题的定义(fg_eval 对象),以及存储结果的 solution 对象。CppAD::ipopt::solve<Dvector, FG_eval>(options, xi, xl, xu, gl, gu, fg_eval, solution);//检查求解器的状态,如果状态为成功(success),则 ok 变量将保持为真。这表示问题已成功求解。ok &= solution.status == CppAD::ipopt::solve_result<Dvector>::success;// 创建一个名为 check_x 的数组,其中包含了问题的精确解。这个数组中的值是问题的已知精确解。double check_x[] = { 10.24, 2.99, 4.99, 2.99 }; // 设置了相对容差和绝对容差的阈值。这些值用于控制验证解的精度。double rel_tol = 1e-6; // relative tolerancedouble abs_tol = 1e-6; // absolute tolerance// 遍历问题中的每个变量,进行解的验证。for(i = 0; i < nx; i++){ //使用 CppAD::NearEqual 函数来比较问题的解 solution.x[i] 与精确解 check_x[i] 是否足够接近。如果它们的差距在相对容差和绝对容差的范围内,ok 变量将保持为真。ok &= CppAD::NearEqual(check_x[i], solution.x[i], rel_tol, abs_tol ); // 使用 std::cout 打印每个变量的解,以便在控制台上查看结果。std::cout << "x[" << i << "] = " << solution.x[i] << std::endl;}return ok;
}// main program that runs all the tests
int main(void)
{ std::cout << "===== Ipopt with CppAD Testing =====" << std::endl;bool result = get_started();std::cout << "Final checking: " << result << std::endl;
}
// END C++
三、编译验证
将上面第二部分,第6步中给出的完整的程序,保存为CppAD_Ipopt.cpp,然后在同一目录下,创建一个名为CMakeLists.txt的文件,接下来,我们需要在CMakeLists.txt文件中,编写编译规则,如下所示:
# 设置CMake的最低版本要求
cmake_minimum_required(VERSION 3.5)
# 项目名称
project(CppadIpoptDemo)
# 寻找Ipopt包(确保你已经安装了Ipopt和CppAD)
# find_package(Ipopt REQUIRED)
# 设置可执行文件的名称和源文件
add_executable(cppad_ipopt_demo CppAD_Ipopt.cpp)
# 包含Ipopt的头文件
# target_include_directories(cppad_ipopt_demo PRIVATE ${IPOPT_INCLUDE_DIRS})
# 链接Ipopt库
# target_link_libraries(cppad_ipopt_demo ${IPOPT_LIBRARIES})
TARGET_LINK_LIBRARIES(cppad_ipopt_demo ipopt)
保存,并关掉CMakeLists.txt文件,接下来就利用该文件对CppAD_Ipopt.cpp进行编译,在该目录下空白处,右键打开终端,依次输入以下四条语句
mkdir build
cd build
cmake ..
make

以上编译结束后,在build文件夹下,生成了可执行文件cppad_ipopt_demo,如下图所示

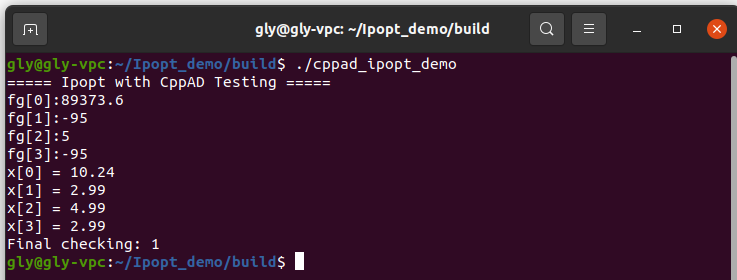
在当前目录下,右键打开终端,输入以下指令运行该文件
./cppad_ipopt_demo
运行结果如下,可以发现即使在给定的初始解很差的情况下,Ipopt非线性求解器依然能够求解出第二部分第0部步中设定的带约束优化问题的最优解。
这篇关于详细介绍如何使用Ipopt非线性求解器求解带约束的最优化问题的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







