本文主要是介绍【论文理解】Neural circuit policies enabling auditable autonomy,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
特点
- 用一个非常浅层的网络结构,实现了自动驾驶的功能。
- 网络结构中的神经元是借鉴了仿生学生物的细胞结构,起名字叫LTC,有比价复杂的传到公式。
- 网络结构是端到端的输入形式,输入是摄像头拍摄的路面情况,输出是控制方向盘的动作。
- 模型可解释性比较好,可以通过观测每一个神经元输出情况,来观测模型的整个学习状况。
- command层网络,使用了rnn序列网络的思想,可以短期记忆之前的网络状态,做到一定的稳定性。
- 模型贡献是在证明了,在端到端的自动复杂任务中,不用使用比较复杂的模型,也能够达到很好的效果,并且在解释性上更强。
模型结构
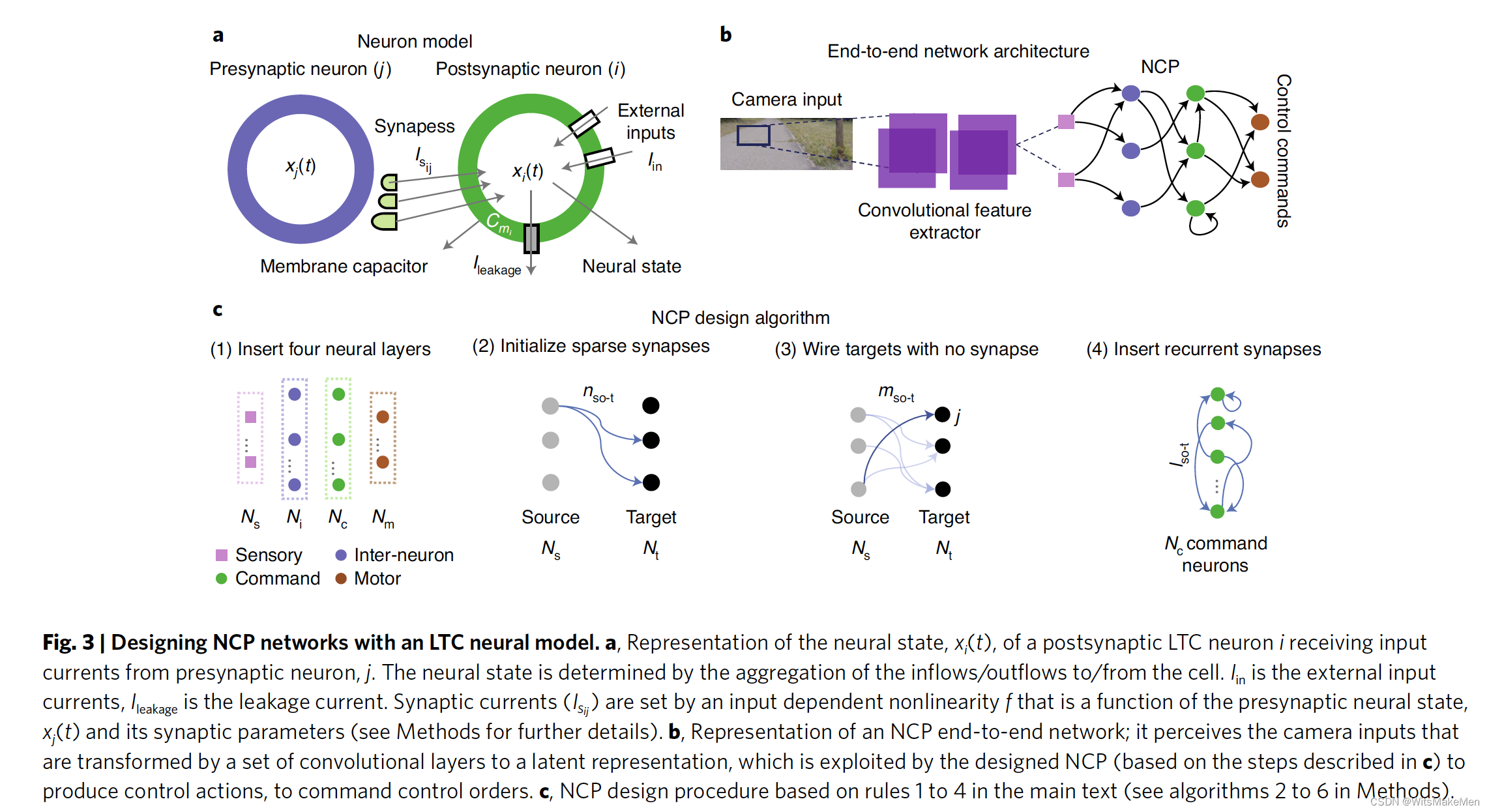
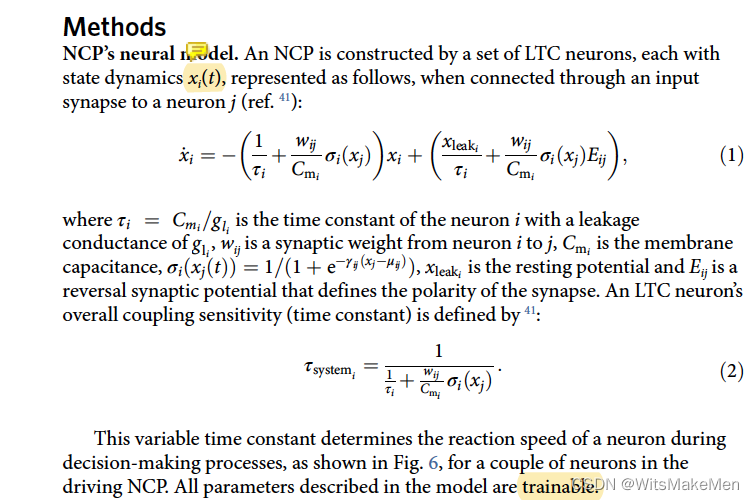
- 模型结构中最大的特点是,经过设计的神经元,xi(t)是一个比较复杂的公式,代表这个神经元的输出。
- 模型总体的结构是,模型第一层sensory感知层,是一个多层CNN网络。
- 第二层inter-neuron是一个稀疏的神经元网络层。
- 第三层command层,是一层带有自连接的rnn网络。
- 最后一层motor输出最终的指令。
RNN的作用
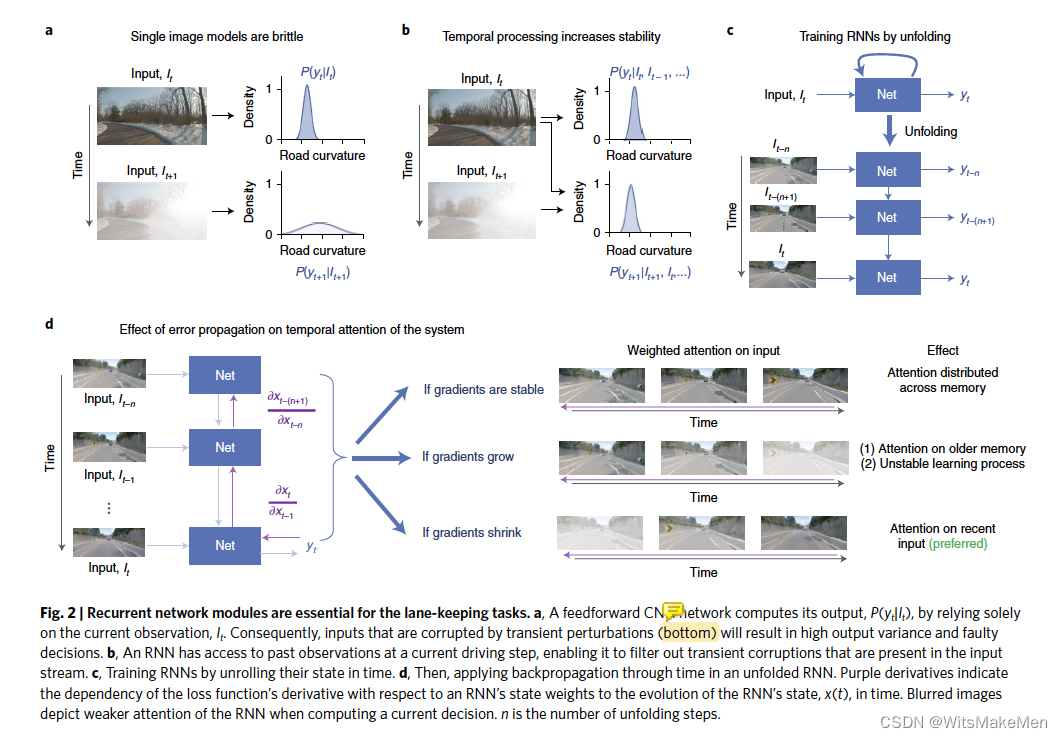
- 让模型的鲁棒性更强,可以有效的对抗噪音
- 对历史的场景有短期的记忆
- 对近期的场景有更优先的选择学习的能力
效果
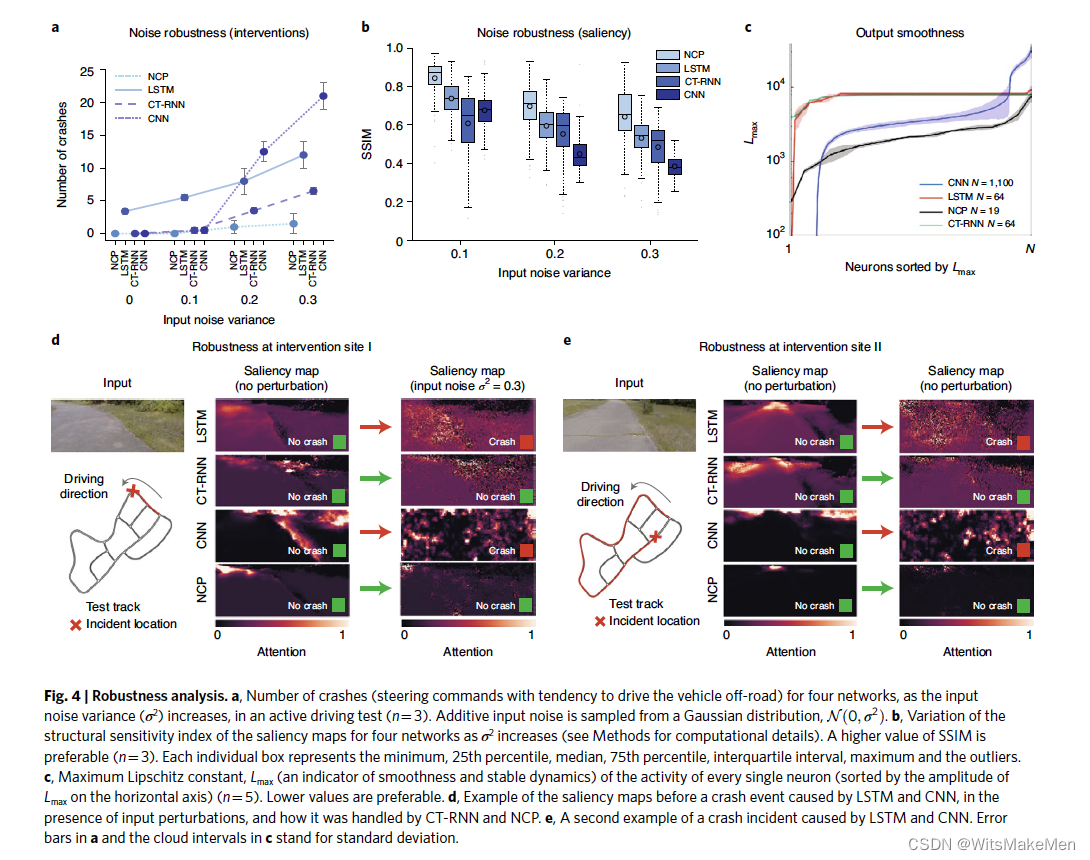
- 在有噪音的情况下,NCP出错了更低
- 和没加入噪音之前对比,使用自定义的ssim计算预测之间的相似度,发现NCP算法加入噪音后,受到的影响最小。
- 操作的流畅度也是ncp更好
可解释性
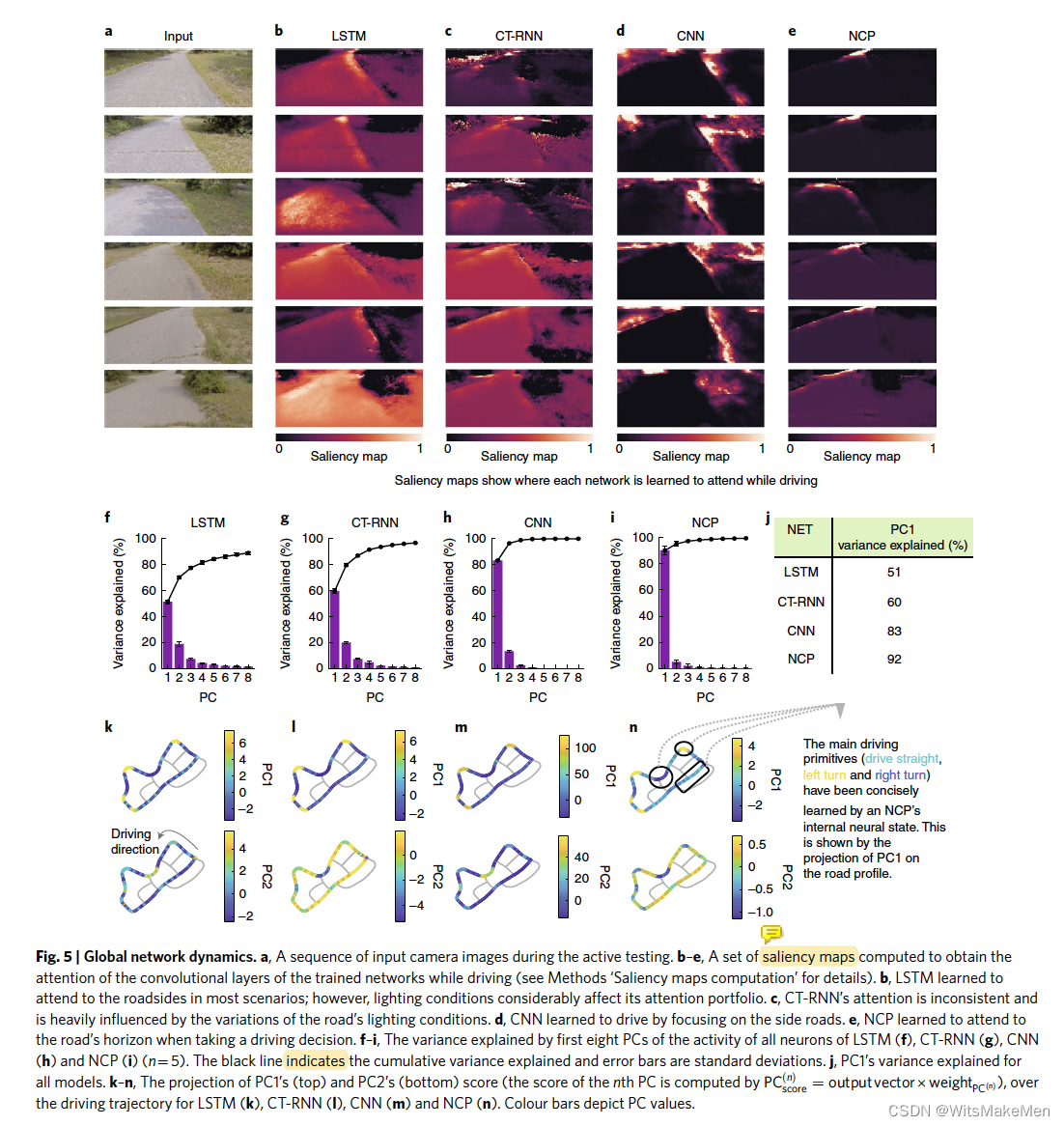
- 主要从三个方面进行可解释性分析:cnn卷积层成像解释,全局动力分析,神经元层分析。
- cnn感知输入层,ncp模型中,倾向于学习路的水平方向,这正是我们想要的。
- 全局动力分析,通过pca主要成分分解,ncp模型中侧pc1可以和目标对应,说明预测效果更好。
- 从神经元方面分析,也能够很好的说明ncp模型学习路况操作效果更好。
原理方面
- 主要是对全连接网络结构进行了改造,当前神经元的输入要和之前神经元的各种状态以及触手链接相关。
这篇关于【论文理解】Neural circuit policies enabling auditable autonomy的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







