本文主要是介绍球体的顶点绘制与纹理坐标的转换,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
预备知识:基础三角函数sin 、cos、方位角、仰角
方位角:the angular distance usually measured clockwise from the north point of the horizon to the intersection with the horizon of the vertical circle passing through a celestial body — from WiseDictionary
意思就是说水平圆片的角 θ \theta θ 范围 是 从0~2π
仰角:在视线所在的垂直平面内,水平线以上的视线与水平线所形成的夹角 ϕ \phi ϕ
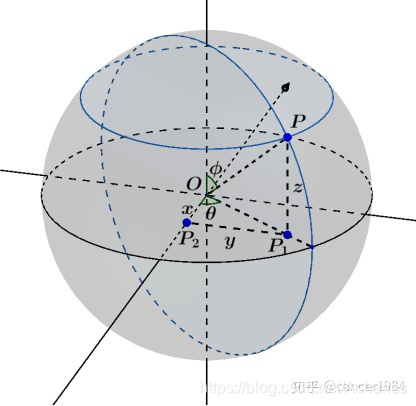
在该图片中,x轴指向屏幕外,与y轴垂直,Z轴指向上方。且线段|PO| = R
即:R* cos( ϕ \phi ϕ) = z;
R* sin( ϕ \phi ϕ) = |OP1| (注P1为点P在圆形平面xoy 上的垂点)
沿着P1作线段 垂直x轴于P2,
线段|P1P2|就是y, |OP2|就是x
|p1p2| = y
|Op2| = x
对于球上一点P(x,y,z),;
P ( x , y , z ) = { R ∗ s i n ( t h e t a ) ∗ c o s ( p h i ) , R ∗ s i n ( t h e t a ) ∗ s i n ( p h i ) , R ∗ c o s ( t h e t a ) P(x,y,z) = \begin{cases} R*sin(theta)*cos(phi), \\ R*sin(theta)*sin(phi), \\ R*cos(theta) \end{cases} P(x,y,z)=⎩⎪⎨⎪⎧R∗sin(theta)∗cos(phi),R∗sin(theta)∗sin(phi),R∗cos(theta)
最后需要注意点:在一般的生活中,x轴指向屏幕外,与y轴垂直,Z轴指向上方,这并不奇怪。但在图形学中,通常是Z轴指向屏幕里面,我们看到的2D平面(屏幕)是横轴X向右为正,纵轴Y向下为正。
球体3D坐标轴与2D纹理顶点数据
在上述公式中决定P(x, y, z)的只有R(默认为1.0f)和 θ \theta θ角以及 ϕ \phi ϕ 。
绘制一个球体的过程在代码中总是从下到上,一层一层地绘制出“点圈”,数层点圈紧密叠在一起就成了一个球体。我们将抽象成两个变量:1、一个y轴上线性递增的量ySegment 2、一个围绕不同维度画一个圈的周长长度的变量xSegment。
如果我们想要将一张2D的图片映射到3D的球面上,那么就必须保持2D图片坐标(U, V)与(xSegment, ySegment)对应即可。
也就是说当设定好xSegment和ySegment的增长率,这里假设为a,b;
那么就可以有:
U = xSegment = xstep * a ; (比如,a = 1/50,将周长均匀划分50等分 )
V = ySegment = ystep * b; (比如, b = 1/50,将球的高度均匀划分50等分)
附带C++实现球体3D坐标到2D纹理坐标的代码:
const float R = 1.0f;for (int y = 0; y <= Y_SEGMENTS; y++){for (int x = 0; x <= X_SEGMENTS; x++){float xSegment = (float)x / (float)X_SEGMENTS;float ySegment = (float)y / (float)Y_SEGMENTS;float xPos = std::cos(xSegment * 2.0f * PI) * std::sin(ySegment * PI);float yPos = std::cos(ySegment * PI);float zPos = std::sin(xSegment * 2.0f * PI) * std::sin(ySegment * PI);sphereVertices.push_back(xPos);sphereVertices.push_back(yPos);sphereVertices.push_back(zPos);// xSegment. ySegment就是对应的纹理坐标纹理//同样压入顶点序列sphereVertices.push_back(xSegment);sphereVertices.push_back(ySegment);}}这篇关于球体的顶点绘制与纹理坐标的转换的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




