本文主要是介绍【UG NX MCD 机电一体化概念设计】PID算法在 UG NX MCD 中的应用案例设计与实现(一),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
PID算法是经典的行之有效的控制算法。
我们如何在NX实现相关的控制呢?MCD这么强大,不用来搞PID就可惜了。
对真实电机,控制器和控制卡通过控制算法控制电机的运动。
对MCD中位置控制,有MCD内置的加减速控制算法控制位置定位,而定位误差的控制暂时未知。
在MCD中,可通过添加碰撞体并配置其碰撞材料模拟真实平面,具有摩擦,阻尼属性。
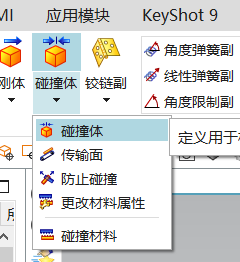
具有重力场

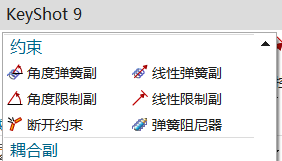
可以配置弹簧
具有各种传感器

材料属性解释
- 动摩擦:动摩擦因数(或动摩擦系数)是彼此接触的物体做相对运动时摩擦力和正压力之间的比值。
- 静摩擦:静摩擦是一个物体在另一个物体表面上具有相对运动趋势时,但并没有发生相对运动时,所受到的阻碍物体相对运动趋势的力。
- 滚动摩擦:滚动摩擦(rolling friction)一物体在另一物体表面作无滑动的滚动或有滚动的趋势时,由于两物体在接触部分受压发生形变而产生的对滚动的阻碍作用,叫“滚动摩擦”。它的实质是静摩擦力。
- 恢复:材料吸收能量或反射能力的系数,影响碰撞的弹性
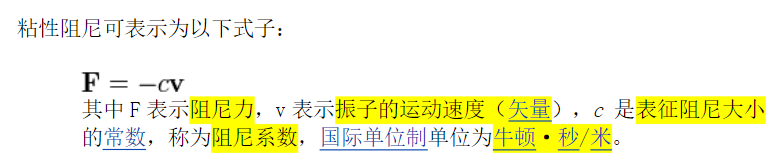
阻尼解释
-
线性阻尼
-
角度阻尼
阻尼是指任何振动系统在振动中,由于外界作用或系统本身固有的原因引起的振动幅度逐渐下降的特性,以及此一特性的量化表征。 在电学中,是响应时间的意思。
另外关于首选项,可参考文献:“机电一体化概念设计器首选项”对话框
基于MCD环境,能用来实现PID的思路就是建立一个模型,模型的状态由MCD物理属性决定,通过给模型输入,以控制模型达到目标状态,即输出,那么反馈就是各类传感器。
PID常见项目
在PID算法应用中,常见的并且可以在MCD中实现的例子:
- 平衡小车

2. 板球系统
不过检测是通过视觉检测,所以需要换一种检测方式。

当然还有很多案例可以做,只等你去发现。
欢迎继续阅读
【UG NX MCD 机电一体化概念设计】PID算法在 UG NX MCD 中的应用案例设计与实现(二)
文章列表:
【UG NX MCD 机电一体化概念设计】PID算法在 UG NX MCD 中的应用案例设计与实现(一)
【UG NX MCD 机电一体化概念设计】PID算法在 UG NX MCD 中的应用案例设计与实现(二)
这篇关于【UG NX MCD 机电一体化概念设计】PID算法在 UG NX MCD 中的应用案例设计与实现(一)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




