nx专题

NX二次开发—进阶(二)
一、创建圆弧 在NX上通过代码画出圆弧,定义起始和终止位置,还有圆心位置和半径 创建圆弧,需要获取CSYS的矩阵ID,通过UF_CURVE_create_arc函数进行创建 //定义参数UF_CURVE_arc_t arc;arc.start_angle = 0.0;arc.end_angle = 225 * DEGRA;//DEGRA=PI/180//中心坐标arc.arc_center

NX二次开发——进阶(一)
一、链表及相关函数的用法 函数说明UF_MODL_create_list创建一个链表,并返回链表的头指针UF_MODL_put_list_item插入元素到链表中,不检验对象是否重复,或者已经存在UF_MODL_ask_list_count获取链表对象数量,从头开始遇到null_tag结束UF_MODL_ask_list_item查询链表对象标识,给个位置返回标识UF_MODL_delete_l

NX客户没有开发许可,需要注册签名
报错提示,库缺少需要的入口 在允许程序后,在NX日志中可以看到,注册许可失败 1、正对C的代码觉得不存在需要注册的情况如果需要注册添加对应的CPP文件,用NXopen下的EXE签名 2、C#的代码如果客户没有开发许可需求注册,用NXBIN下EXE签名 两种签名的EXE不同。

NX上传数据集到TC问题
NX上传数据集到TC问题 NX集成TC中上传数据集总是,”Sheet“的命名的引用不存在与 Sheet中。 解决版本是因为没有再Sheet数据集中添加对应的CGM文件的引用和工。再BMIDE中给数据集Sheet添加对应的工具PV 和新的引用”XD5-cgm“,再次上传成功。

C# NX二次开发-获取体全部面
使用 UF_MODL_ask_body_faces 或获取一个体的全部面: 代码: theUf.Modl.AskBodyFaces(body.Tag, out var face_list);face_list.Foreach(x => x.NxListing()); 免责声明: 只用于参考,如果有什么问题不要找我呀。
![[Python图论]在用图nx.shortest_path求解最短路径时,节点之间有多条边edge,会如何处理?](/front/images/it_default2.jpg)
[Python图论]在用图nx.shortest_path求解最短路径时,节点之间有多条边edge,会如何处理?
问: 在使用图求最短路径时,如果节点之间有多条路径,shortest_route = nx.shortest_path(G, source=start_node, target=end_node, weight='length')会如何处理,会自动选择最短那条吗? # 输出图G各节点之间有多少条边edge,并给出其长度Edges between 103928 and 25508583:共2条
xavier NX编译caffe错误记录(一)
在xavier NX上编译caffe时遇到一些错误,简单记录一下, 目录 一:首先是缺少各种库,对于这种错误直接用下面这篇博客的笔记安装相应的依赖库即可。 二:无法读取cudnn版本 三:找不到opencv 四:CUDA_cublas_device_LIBRARY (ADVANCED) linked by target "caffe" in directory /data/software/c
Jetson Xavier NX apt更换国内源
在xavier NX板子上安装软件包的时候,网速特别慢,于是想更换源,网上找到了如下博客,验证可用。 原文地址 [NVIDIA]-3 入手 Jetson Xavier NX apt更换国内源_darnell888的博客-CSDN博客 本文主要讲述,基于 Jetson Xavier NX 开发者套件apt更换国内源。 What is Jetson Xavier NX : NVIDIA® Jet

NVIDIA Jetson xavier NX安装torchvision
上一篇文章里面记录了在xavier NX上安装pytorch,https://www.cnblogs.com/cumtchw/p/13273753.html 然后接下来安装torchvision,下面是英伟达官网上的torchvision的安装方法:https://forums.developer.nvidia.com/t/pytorch-for-jetson-nano-version-1-5-
Jetson xavier NX 485串口接口封装/Jetson Xavier NX 串口通讯
目录 1.查看Jetson Xavier NX串口 2.硬件调试环境搭建 3.代码 3.1.dataType.h 3.2.rs485Service.h 3.3 rs485Service.cpp 3.4 demo 4 实验结果 1.查看Jetson Xavier NX串口 首先查看NX板子上的串口,执行 ll /dev | grep tty 可以看到串口,这次我们使用ttyT

UG NX二次开发(C++)-获取曲面的相切曲面
文章目录 1、前言2、创建一个三维模型3、获取相切曲面的方法3、测试结果 1、前言 最近一段时间,QQ群中的群友总问我一个问题,那就是如何获取曲面的相切曲面,我今天就把这个方法写出来,以帮助读者。 在UG二次开发中,查询了帮助文档,没有找到获取相切曲面的函数。所以采用NXOpen来获取。如果有关于UG NX二次的疑问或者想学习UG NX二次开发技术,可以私信博主。 2、创建

jetson xavier nx 编译使用 libtorch
不能直接下载编译好的。使用起来会报错要自己编译,详细根据自己的 JetPack 去下载对应版本 下载地址:JetPack libtorch下载地址 3.安装 sudo apt-get update sudo apt-get upgradesudo apt-get install python3-pip libopenblas-base libopenmpi-devpip3 instal
NX/UG二次开发—其他—关于CATIA数据转UG数据
可以使用录制UG导入CATIA功能实现,但是根据UG版本的不同,里面的参数设置不同,不能做成通用的版本。对于UG文件名如果需要跟CATIA数据名一致,还需要考虑名字问题。因为CATIA数据的名字里可能还要特殊字符,但UG不支持,还需要写字符处理的功能,开发起来还是有一定的工作量。 以下是我的方案,只需两步(剩下的调用转换器和名字字符处理都交给UG去处理了): 1、直接打开catia

NX/UG二次开发—QT—基于QT平台的UG二次开发
1、新建QT工程,选择C++库,工程名称qtugdemo: 2、添加对话框文件: 3、将UG入口函数考入到qtugdemo.cpp中,并添加如下代码: 4、修改*.pro文件,添加UG函数需要的lib库和头文件包含路径: 5、编译运行,在UG中调用,效果如下: PS:在开发过程中发现一个问题未解决:当我将QT窗口嵌入到BLOCK UI后,block ui对话框消
NX/UG二次开发—其他—分享几个UG内部函数
1、获取当前模块名称 ?MT_get_appname@@YAPEADXZ 2、获取当前过滤类型个数和激活项?SEL_ask_type_filter_index@@YAH_NPEAH@Z 3、设置当前过滤类型?SEL_set_type_filter_index@@YAXH_N0@Z 4、附加和获取UG标题字符?MT_append_ug_title@@YAXPEAD_N@Z ||?MT_ask_ap
NX/UG二次开发—其他—替换、新增UG启动界面+修改UG背景界面
一、修改UG启动画面(适用于UG6.0以前版本): 1.首先准备软件ResHacker,百度一下就行。 2.到UG的安装目录UGII下拷贝ugraf.exe(记住:复制一个放着备份,以免修改错误),去掉ugraf.exe的只读属性,然后用ResHacker打开,在>>资源>>位图>>130,点击一下,左侧显示的就是UG启动的那张画面,我们需要做的就是拿同样大小的图片用在位

NX/UG二次开发—CAM—获取加工环境下所有程序组、刀具组、加工坐标系并输出名称
以下代码为CAM所有程序组、刀具组、加工坐标系并输出名称 源文件在群共享文件中。(QQ群:1023204977)
NX/UG二次开发—CAM—获取刀轨最低点算法
找了半天帮助文档,没有找到关于刀轨加工Z向最低点的函数,既然没找到,那就换个方法。可以用UF_SETUP_generate_clsf导出程序的刀轨文件,然后再刀轨文件里遍历“GOTO”语句,查看最小的Z值。注意打孔的话还需要找到“CYCLE”语句后面的深度值,用最小Z值减去深度值。 按照这个思路,试运行一下,发现结果没问题。后来编制一个G18\G19的圆弧刀轨,发现出现BUG,因为圆弧的GOTO

NX/UG二次开发—其他—UFUN函数调用Grip程序
在平时开发中,可能会遇到UFUN函数没有的功能,比如创建PTP的加工程序(我目前没找到,哪位大神可以指点一下),可以使用Grip创建PTP,然后用UFUN函数UF_call_grip调用Grip程序。 具体如下截图(左侧UFUN,右侧Grip程序):

NX/UG二次开发—CAM—用户自定义刀轨(UDOP)+ 螺旋铣用例教程 + 源码
用户定义刀轨是指:在需要一种无法由标准制造处理器完成的加工方法时,使用NX以外的处理器生成刀具路径的操作。这可能是你自己的或第三方的代码。入口函数udop。以下是程序框架,可以往里面添加你的代码 extern void udop(char *param, int *status, int parm_len) { char
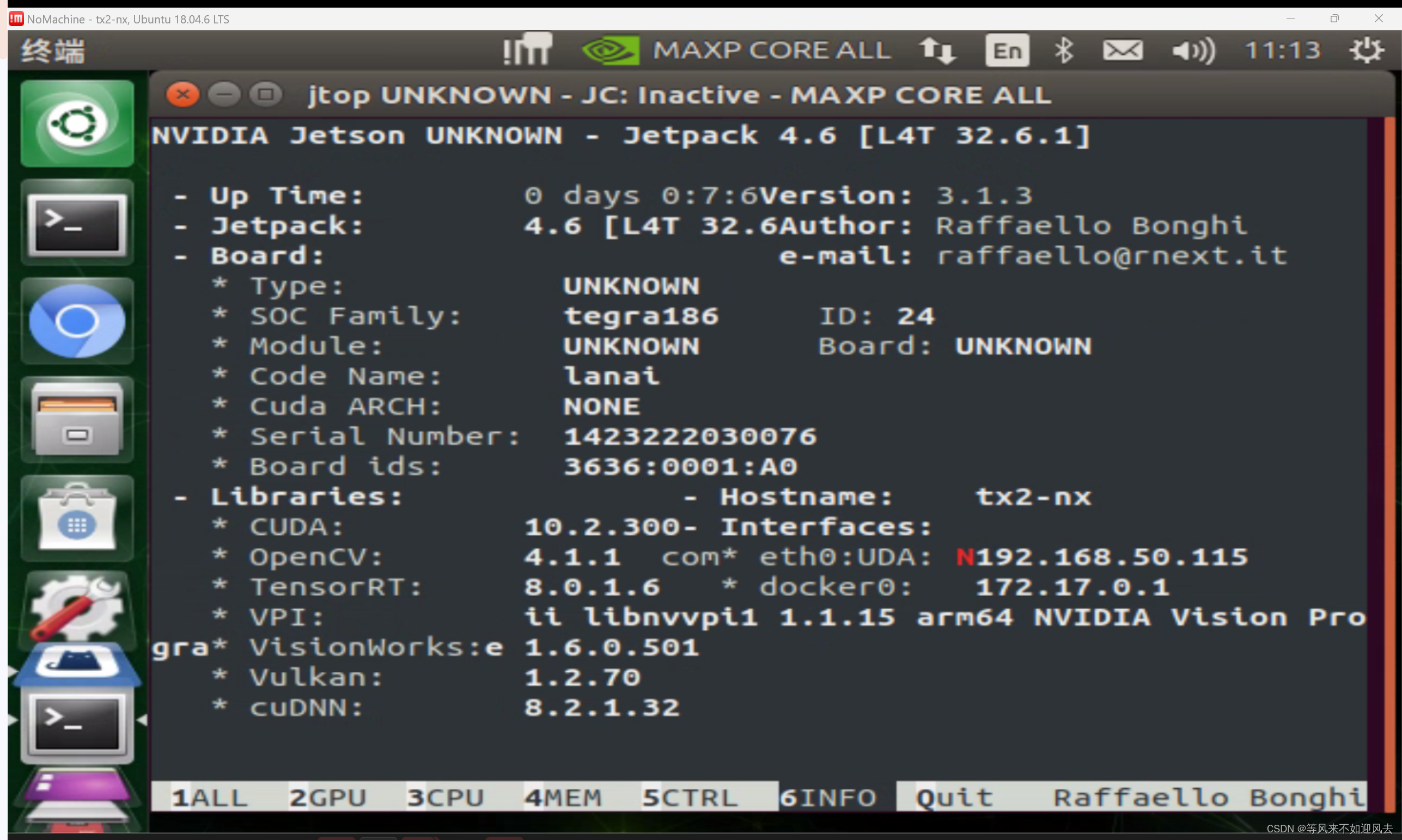
【ai】tx2-nx 查看 jetpack 版本信息及对应的tritonserver
3 jtop nvidia@tx2-nx:~$ jtop[WARN] Board missing UNKNOWN (press CTRL + Click)nvidia@tx2-nx:~$ 点击info 可以看到 jetpack是4.6opencv 是4.1.1 5.1.2 的不适合我 tritonserver2.35.0-jetpack5.1.2-update-2.tgz
【ai】tx2-nx:搭配torch的torchvision
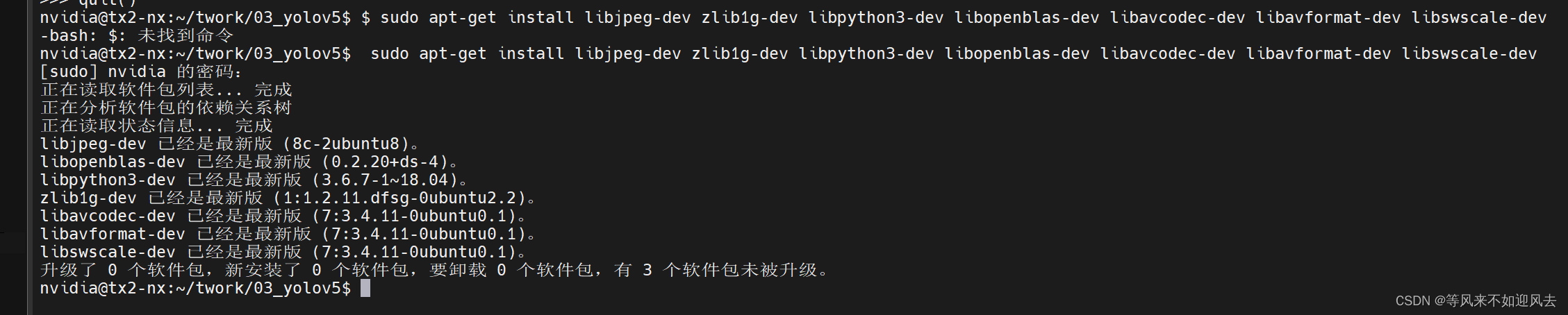
微雪的教程 pytorch_version 1.10.0 官方教程安装torch 官方教程 依赖项 nvidia@tx2-nx:~/twork/03_yolov5$ $ sudo apt-get install libjpeg-dev zlib1g-dev lib

【ai】tx2-nx 开通samba
ubutn服务器加入了samba给jetson也加入一个 samba 添加root用户 密码与nvidia一样 添加nvidia 到suoders中并添加samba账号 nvidia@tx2-nx:~$nvidia@tx2-nx:~$nvidia@tx2-nx:~$nvidia@tx2-nx:~$ sudo vi /etc/sudoersnvidia@tx2-n
Python 求解级数$\sum_{n=1}^{\infty}\cfrac{\left(-1\right)^nx^n}{nn!}$的值
看这篇之前,推荐先看Python 计算(-1)^n * x^n / (n * n!)的值 这里我们求解一下如下级数的值: ∑ n = 1 ∞ ( − 1 ) n x n n
arm x86 交叉编译 ROS 项目程序最简单的方式及踩坑完整经验 ,亲测可以运行简单和复杂的 ROS 项目 Jetson Xavier NX 3588
需求: ROS 程序源代码每次在 NX 或者 RK3588 编译很慢,并且有源代码泄露的风险,需要在x86 intel 的笔记本 ubuntu 的环境交叉编译 ROS 程序, 之前试过传统的ros 项目交叉编译方式,特别复杂依赖很多,并且试了很久都不成功,这次尝试了通过 Docker 移植的方案,很简单也比较顺利。 安装qemu sudo apt install qemu qemu-
NX二次开发消息打印,可用于调试
通过函数重载可打印各种类型的数据,通过 UF_UI_is_listing_window_open判断打印消息窗口是否打开,如果打开就不用重复打开 void message(double value, int style){char msg[256];sprintf_s(msg, "%f", value);if (style){logical response;UF_UI_is_listing