本文主要是介绍使用simulink仿真连续(离散)线性定长系统全维渐进状态观测器,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
系统模型:
闭环极点设计分离性
设计系统输出反馈系数K
转换标准能控型
设计反馈矩阵G
仿真
matlab代码
simulink模型
仿真结果
仿真程序下载地址:连续定常系统全维状态观测器simulink仿真m代码-智慧城市文档类资源-CSDN下载
全维数字观测器输出反馈-智能家居文档类资源-CSDN下载
系统模型:
闭环极点设计分离性
闭环系统的极点包括直接状态反馈系统
的极点和观测器
的极点两部分。但二者独立,相互分离。表明,由观测器构成状态反馈的闭环系统,其特征多项式等于矩阵(A+BK)与矩阵(A-GC)的特征多项式的乘积。亦即闭环系统的极点等于直接状态反馈(A+BK)的极点和状态观测器(A-GC)的极点之总和,而且二者相互独立。因此只要系统(A,B,C)能控能观,则系统的状态反馈矩阵K和观测器反馈矩阵G可分别进行设计。这个性质称为闭环极点设计的分离性。
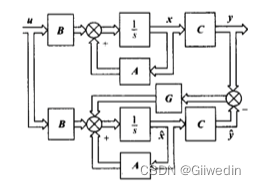
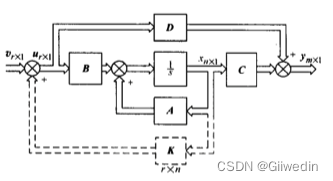
图1 渐进状态观测器 图2输出反馈
设计系统输出反馈系数K
证明系统能控性
转换标准能控型
系统传递函数
线性非奇异变换矩阵
标准能控1型
加入状态反馈增益矩阵
闭环特征多项式
使闭环极点与期望的极点相符求出增益K
设计反馈矩阵G
验证系统能观
观测器方程
非奇异变换
能观标准2型
闭环特征多项式
使闭环极点与期望的极点相符求出增益G
仿真
matlab代码
clear
A = [0 -1 0 0;0 0 2 3;0 0 0 -1;0 0 0 0];
B = [0;0;0;1];
C = [1 0 0 0];
%配置目标极点
K = acker(A,B,[-1,-1,-1+i,-1-i]);
%设计观测器
G=acker(A',C',[-1,-1,-1,-1])';
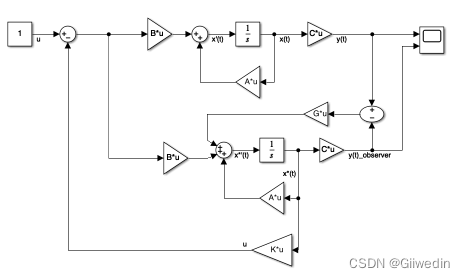
simulink模型
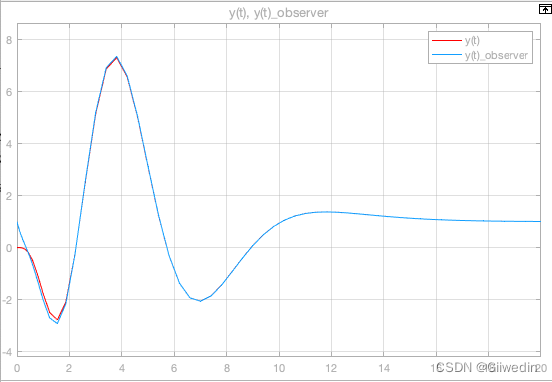
仿真结果
仿真程序下载地址:连续定常系统全维状态观测器simulink仿真m代码-智慧城市文档类资源-CSDN下载
全维数字观测器输出反馈-智能家居文档类资源-CSDN下载
相关文章:
使用simulink仿真连续(离散)线性定长系统全维渐进状态观测器_Giiwedin的博客-CSDN博客
使用drem对控制系统进行参数估计simulink仿真_Giiwedin的博客-CSDN博客
对给定干扰信号的simulink数字控制系统仿真_Giiwedin的博客-CSDN博客_simulink扰动信号
二相混合式步进电机闭环矢量控制simulink仿真(含仿真文件)_Giiwedin的博客-CSDN博客_步进电机数学模型
二相混合式步进电机开环细分控制simulink建模仿真含模型文件_Giiwedin的博客-CSDN博客
这篇关于使用simulink仿真连续(离散)线性定长系统全维渐进状态观测器的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





