本文主要是介绍在贸易战前夕谈谈自动驾驶的“大脑”和“小脑”,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
雷锋网(公众号:雷锋网)新智驾按:本文来自海高汽车CEO徐超,曾任微云车联和新悦智行的联合创始人&CEO。海高汽车在持续为主机厂客户供应高可靠性运算域控单元及底盘运动控制单元和相关的应用设计服务同时,基于英伟达Xaiver泽维尔架构的新款量产智能驾驶运算单元也已接近量产,自主可控的全国产化运算单元WiseADCU-CN2亦进入设计验证阶段。
在本文中,作者对市面上的自动驾驶运算控制系统进行了解读和分析,也汇报了海高汽车在自主可控自动驾驶运算控制平台方面的研发进展。此外,还详细的分解和分析了自动驾驶的“大脑”和“小脑”。雷锋网新智驾获作者授权转载此文。
IT行业在近期以及未来一段时间与国家经济战略密切相关,美国国会先后发布关于中国黑客对美国高科技企业实施“硬件植入”的虚假报告,美国国务卿落地北京三小时即离去的新闻。再加上今年四月份的ZTE受美国制裁事件,可以预感到,在芯片层面,几乎完全依赖美国和其小伙伴们的汽车电子产业将受到长期的影响。
这未必是一件坏事,中华民族的智慧和潜力往往在危难时刻被激发出来。作为从业者,还是衷心希望中美关系能够在平等互利的框架下缓和,产业能够稳步发展。
本人在今年五月中旬的CICV2018大会上,应邀做了《中国自主可控的自动驾驶计算平台开发》的主题报告,结合海高汽车的运营,对市面上的无人驾驶运算控制系统进行了解读和分析,也把海高汽车在自主可控无人驾驶运算控制平台方面的研发进展向大家做了汇报。结合目前的现状和近半年来海高汽车取得的一些新的进展,在此为大家更加详细的分解和分析一下无人驾驶的“大脑”和“小脑”。
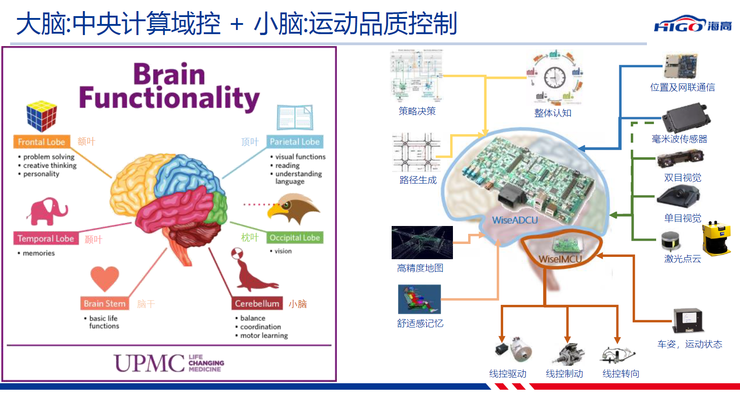
按照人的生理构造,与日常活动有关的部分由感知(眼、耳、鼻、舌、皮肤等),认知、决断、记忆(大脑),运动协调性控制(小脑)、信息传递(神经系统)及执行(骨骼、肌肉)组成。对照到一辆智能汽车上,各种车内外传感器组成感知,运算域控单元完成融合认知决策和地图、数据和策略的记忆,底盘运动控制系统完成车辆纵横向运动协调,总线构成指令和反馈的信息通路,驱动、制动、转向、车身、灯光、舒适等系统完成运动的执行。
传感器系统的感知精度、响应速度、环境适应性不断提升,成本也在不断下降,这里面主要设计半导体、电化学、光学、机电控制、工艺、算法、材料科学等专业领域,尤其是高功率密度的半导体技术、高精度机电控制和材料科学方面,是我国的薄弱环节,但大家也可看到,近年来在各大科研院所的推进下不断的在取得突破。
而高精度地图和算法方面,国内并不落后,甚至可以说在世界范围内属于第一梯队。
例如执行器本身,在中国制造2025国策的推动下,也跻身世界先进的行列,可以说肌肉骨骼都是相对强健的。
但是,高性能车载运算平台“大脑”和对各执行机构的精准协调控制“小脑”方面,还有很大的提升和发展空间,属于核心领域。海高汽车的目标就是在这两个领域取得突破,最终实现中国自主可控的“大脑”和“小脑”。本文将分为上、中、下三篇对此进行详细的分析和描述。
在一个相对落后的领域取得突破,通常大家会采取“三步走”的策略:
学习借鉴;
自主研发;
实现超越。
拿到行业先进友商及合作伙伴的量产产品和新产品的设计模型是学习借鉴的根本,如下提到的各种“大脑”平台,海高汽车绝大多数都对实物进行了详尽的分析和评估。
Tesla的Autopilot 2.0和2.5
首先是Tesla的Autopilot 2.0和2.5,如下图所示:
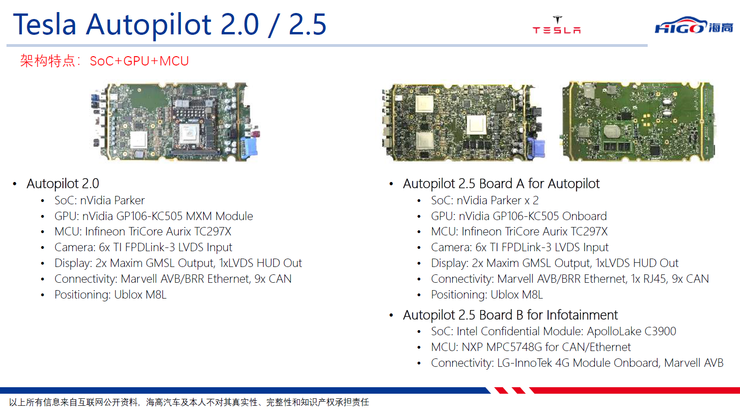
可以看到,其架构采用了SoC+GPU+MCU的方式,在AP2.0上,主要由一个英伟达Parker SoC、一个英伟达Pascal GP106的GPU以及英飞凌的TriCore AURIX ASIL-D TC297X MCU组成,SoC和MCU以CAN、SPI和TSN/AVB互联,提供LVDS的摄像头接口、CAN、LIN总线和AVB/TSN高速网络实现传感器接入和车辆可靠控制。其架构参考来源是英伟达Drive PX2系列自动驾驶开发平台。
但AP2.5做了一定的升级,增加了一颗Parker SoC,以此提升GPU的运算频率,增加多路摄像头接口,并以英特尔的Apollo Lake C3900加上NXP的MPC5748G实现信息娱乐系统与自动驾驶系统的整合,两块主板以高速总线互联,并共享基于液传到的热管理。
提到特斯拉,不得不说英伟达在自动驾驶领域的布局。
英伟达
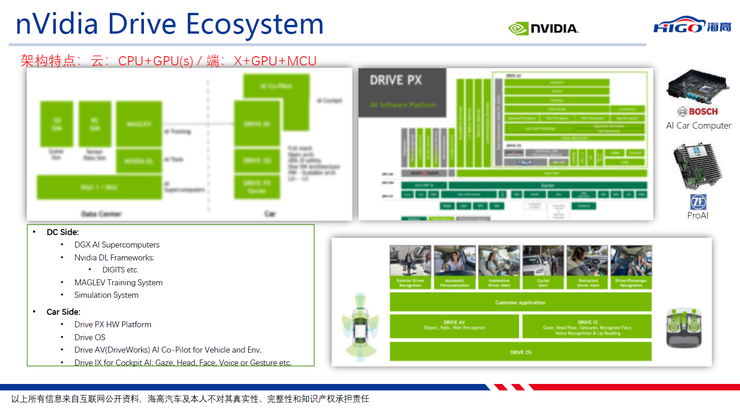
从英伟达的整体来看,在云和端针对自动驾驶和未来座舱做了非常详尽和深入的布局,所以成为目前市场量产车型最大的运算平台芯片供应商,不是一日之功。
市面上常见的是车端的Drive系列产品,包括CX,PX,PX2和最新的AGX Xavier/Pegasus等。
而在云端上,英伟达则布局了DGX系列和更高性能的GPU运算数据中心HGX系列以及相关的DL框架,训练和仿真系统。
在车端上,英伟达的布局已经从单纯的Drive硬件平台,演进成整个生态系统,以Linux/QNX为底层的Drive OS,面向自动驾驶的Drive AV以及面向未来座舱交互的Drive IX中间层已经形成较为完整的未来架构。
值得注意的是,1~4代产品性能孱弱的Tegra SoC的CPU部分,从Tegra K开始Denver丹佛架构已经不输高通的架构,CPU架构方面的细节后续作者会以一篇单独的文章进行分析。
同时,海高汽车在一段时间内面向量产的运算平台都会以英伟达的GPU和SoC为主,包括Intel Kabylake + GP104的WiseADCU M6 DevKit以及基于Parker+GP106的WiseADCU S1 ProdKit,不出意外的话,海高汽车也将是第一个实现自主定制Xavier架构SoC的车载域控单元WiseADCU X1 ProdKit的国内企业。此外,16路GMSL高清摄像头和双千兆、4BRR百兆以太网和8路CAN、4路LIN支持,以30瓦功耗实现15倍于Parker面向量产L3+的旗舰方案年内将在数家自主品牌主机厂实施测试。
当然,英特尔作为芯片行业的带头大哥,怎能坐视英伟达这个数次差点挂掉的小兄弟在自动驾驶领域的碾压之势。从百亿美刀收购Mobileye那一刻起,军备竞赛就已开始。
英特尔
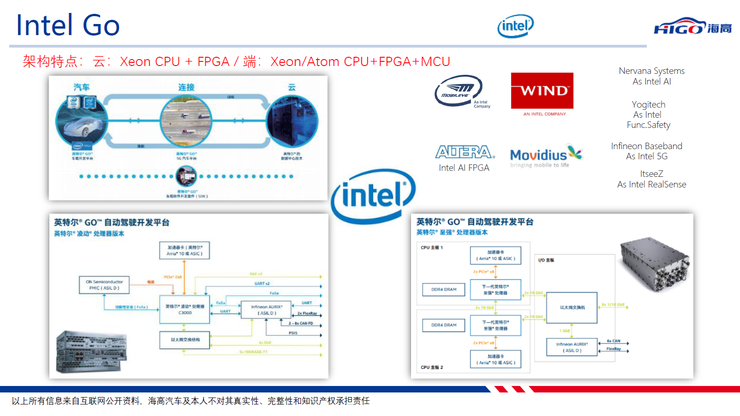
从上图中可以看出,英特尔除了品牌、产业认可和资金优势之外,云+管+端的全面布局,也是非常值得期待。
CPU不用多说,英飞凌的基带目前已经得到苹果的青睐,几乎把高通踢出局了,而英伟达高买低卖的Icera基带退出移动产品市场背后的故事和辛酸可能只有黄教主能深刻体会。除了芯片和基带,Mobileye的算法、数据和经验的积累,Altera的FPGA,WindRiver的操作系统,Movidius和Nervana的AI算法和架构,Yogitech的功能安全以及ITSeeZ的RealSense构成了强大的“航母舰队”,面对英伟达的核潜艇+核导弹驱逐舰的火力,鹿死谁手犹未可知,真是一场值得期待堪比星球大战的大戏。
虽然中国政府否决了高通对NXP的收购,但是对NXP来说,这艘在汽车领域里火力强大的战列舰,以其扎实的底蕴和武器装备的不断升级,守住并拓展自己的领地应该不成问题。
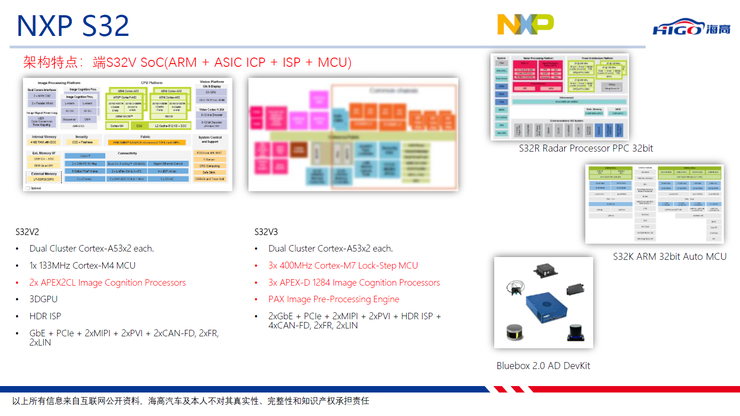
“任何一辆当代汽车里面都必然有NXP的芯片或专利技术”,这种底气来源于强大的实力和多年的坚持,在完成对Cognivue以及OmniPHY的收购之后,NXP几乎补齐了从传感器、运算、车内通信到执行控制芯片的全部产业链。
如果说Cognivue收购S32V2是一次不太成功的试水,S32V3的强大,则让人无法忽视其将对视觉感知为核心的L2+市场带来的冲击。而且NXP也是为数不多提供周边传感器完全整合L3+ BlueBox 2.0方案的芯片公司,BB2可以做到开箱即装即用。
总结来看,作者在本文中详细解读分析了自动驾驶运算控制系统、自动驾驶的“大脑”和“小脑”。关于中篇对Renesas、Xilinx的策略以及两大著名的运算平台方案提供者TTTech和进行分析和论述;下篇分享底盘运动控制相关的理解和感悟以及海高汽车在自主可控“大脑”和“小脑”方面的设计和生态构建,请持续关注雷锋网新智驾后续报道。
雷锋网版权文章,未经授权禁止转载。详情见转载须知。

这篇关于在贸易战前夕谈谈自动驾驶的“大脑”和“小脑”的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






