本文主要是介绍Opencv——findContours函数再探(由轮廓联想连通域),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
- 关于调参的一些思考
- 分析图像的一些角度
- 面积、周长、矩形度、圆形度、宽长比
- 例1:找出汽车轮毂圆孔(从轮廓和连通域两个角度)
- 例2:找出芯片中间正方形物体
- 例3:桌面上橘色物体
- 总结
关于调参的一些思考
合理的参数设置,应该是基于对需要解决的问题的一些已知条件。如需要提取的线段的长度范围,需要定位的工件的尺寸、大小(面积)、形状,周长,矩形度,圆形度等。
分析图像的一些角度
1.从算法上
图像降噪,直方图增强,二值化,频率分析,图像形态学,几何信息 提取,特征提取,等各种数学方法。 尽可能多的输出结果。
2.从策略上
筛选出实际需要的结果。
把握需要的信息和干扰信息的本质差距。
面积、周长、矩形度、圆形度、宽长比
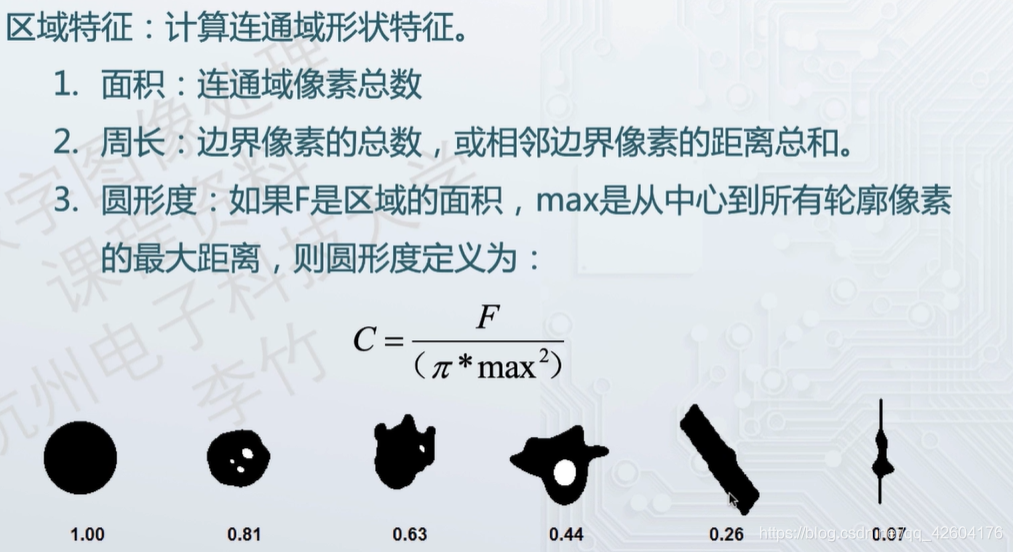

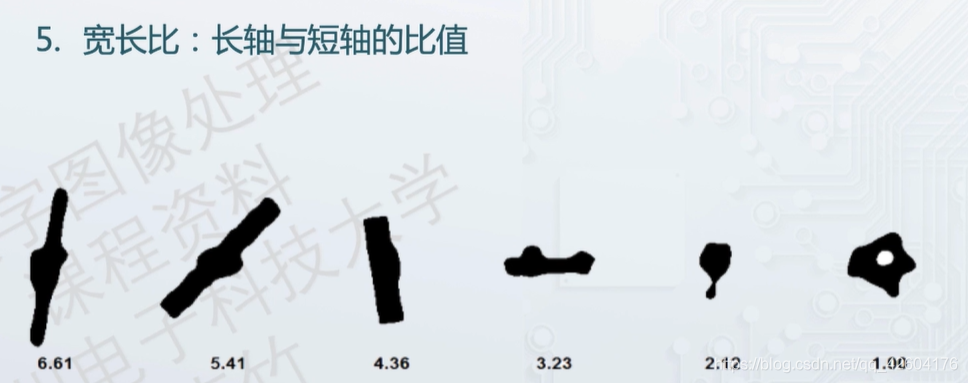
这里不做具体分析,以后专门写一篇笔记。
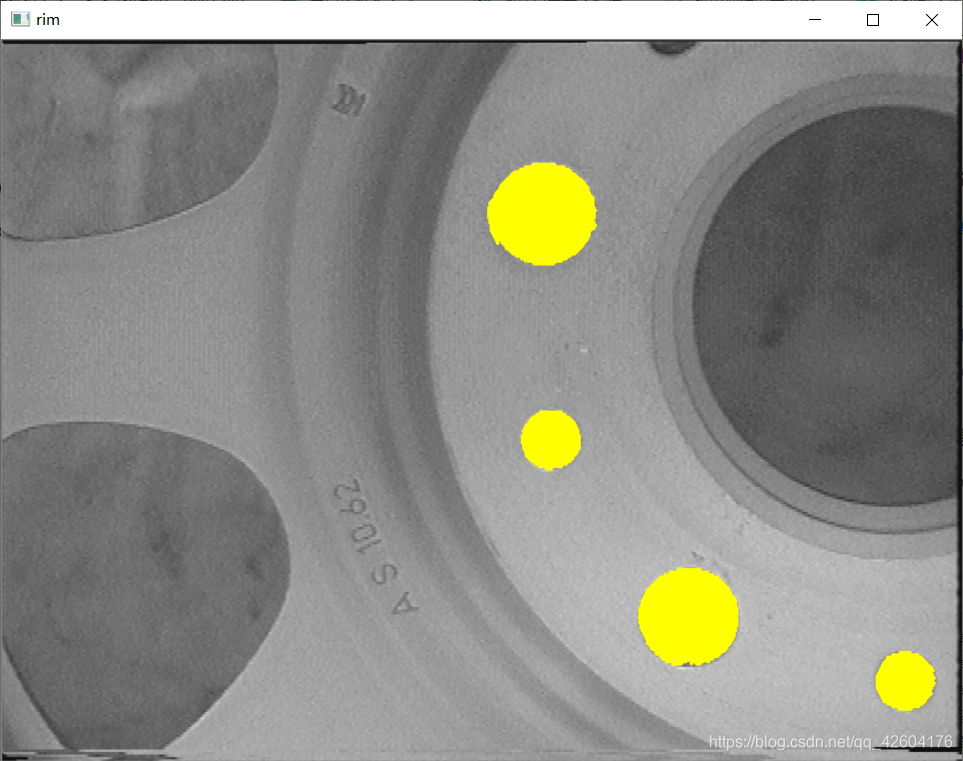
例1:找出汽车轮毂圆孔(从轮廓和连通域两个角度)
原图:
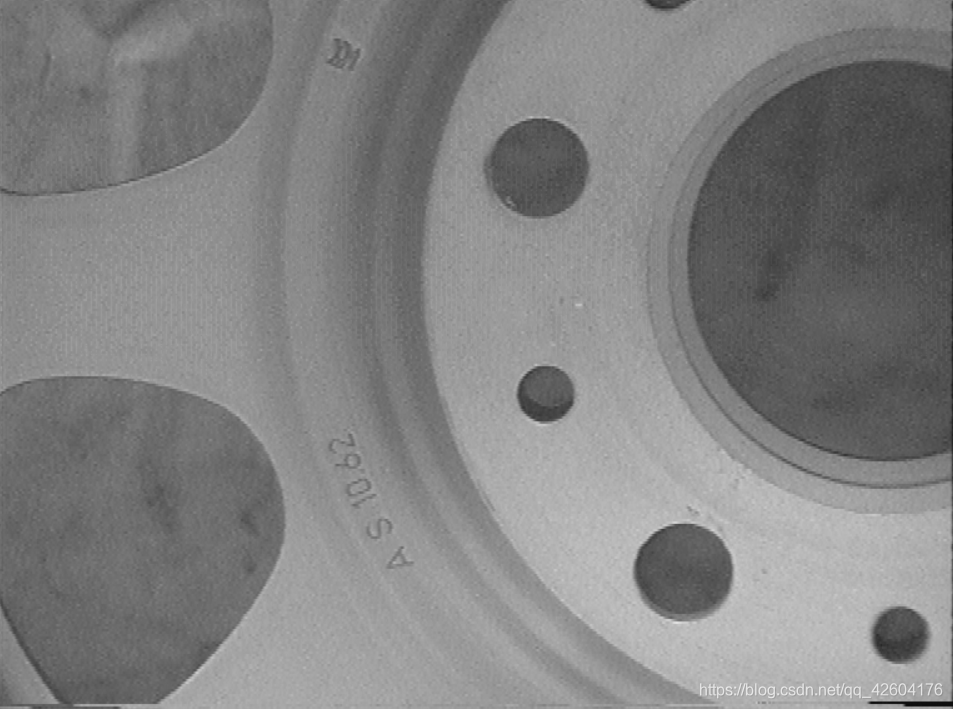
分析:
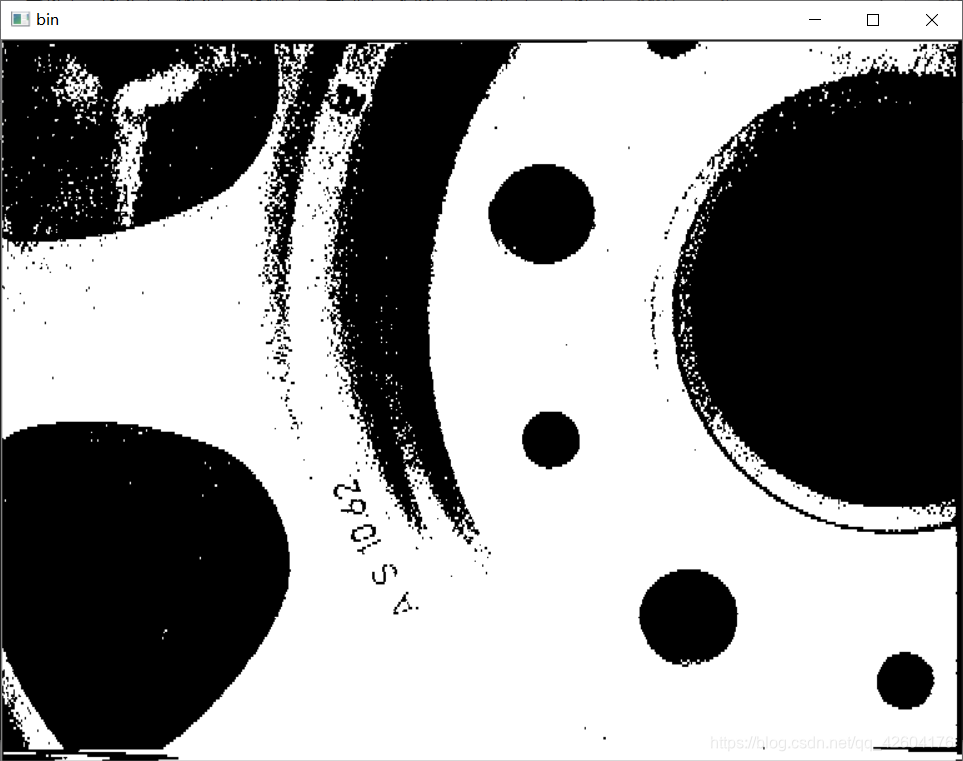
1、获取二值图像(选用二值化阈值或者canny算子扫描)
2、通过findContours函数寻找连通域,轮廓则是对应连通域的轮廓
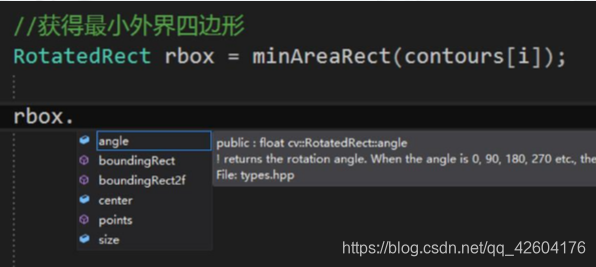
3、通过minAreaRect函数获取轮廓最小矩形框(可旋转),利改矩形框的特征来锁定目标(这里我们限制,矩形框的长宽比值在1附近,并且矩形框的宽度大于10)
4、对锁定的轮廓,通过drawContours函数绘制轮廓(注意参数,倒数第二个填-1则为填该改轮廓,类似漫水填充,不过漫水填充不能获取轮廓特征)
另一种思路:
1、获取二值图像(这里为了使圆圈内部为白,使用反阈值)
2、利用connectedComponentsWithStats函数获取连通域矩阵
3、通过状态矩阵statsMat,来获取连通域最小外接四边形 (bounding box)的 x, y, width,height和面 积(像素数量)
4、通过四边形的条件来限制
思路1代码:
int main()
{cv::Mat srcMat = imread("D:\\opencv_picture_test\\rim.png", 1);Mat dstMat, binMat;cvtColor(srcMat, dstMat, COLOR_BGR2GRAY);threshold(dstMat, binMat, 0, 255, THRESH_OTSU);imshow("bin", binMat);//通过findContours函数寻找连通域vector<vector<Point>> contours;vector<Vec4i> hierarchy;findContours(binMat, contours, RETR_LIST,CHAIN_APPROX_NONE);//绘制轮廓,内填充for (int i = 0; i < contours.size(); i++) {RotatedRect rbox = minAreaRect(contours[i]);if (fabs(rbox.size.width * 1.0 / rbox.size.height - 1) < 0.1 && rbox.size.width > 10)drawContours(srcMat, contours, i, Scalar(0, 255, 255), -1, 8);}imshow("rim", srcMat);waitKey(0);
}
二值图:
框定图:
思路2代码:
int main()
{Mat lableMat;Mat statsMat;Mat centerMat;Mat srcMat = imread("D:\\opencv_picture_test\\轮廓\\rim.png", 1); //读取灰度Mat dstMat;cvtColor(srcMat, srcMat, COLOR_BGR2GRAY);//调用阈值函数threshold(srcMat, dstMat, 120, 255,THRESH_BINARY_INV);//腐蚀操作//Mat element = getStructuringElement(MORPH_ELLIPSE, Size(9,9)); //morphologyEx(dstMat,dstMat, MORPH_ERODE, element); int nComp = cv::connectedComponentsWithStats(dstMat,lableMat,statsMat,centerMat,8,CV_32S);for (int i = 1; i < nComp; i++){cout << "pixels = " << statsMat.at<int>(i, 4) << endl;cout << "width = " << statsMat.at<int>(i, 2) << endl;cout << "height = " << statsMat.at<int>(i, 3) << endl;cout << endl;}for (int i = 1; i < nComp; i++){Rect bndbox;bndbox.x = statsMat.at<int>(i, 0);bndbox.y = statsMat.at<int>(i, 1);bndbox.width = statsMat.at<int>(i, 2);bndbox.height = statsMat.at<int>(i, 3);if (fabs(bndbox.width * 1.0 / bndbox.height - 1) < 0.1 && bndbox.width > 30)rectangle(srcMat, bndbox, CV_RGB(255, 255, 255), 1, 8, 0);}imshow("src", srcMat);//imshow("dst", dstMat);waitKey(0);
}
效果图:

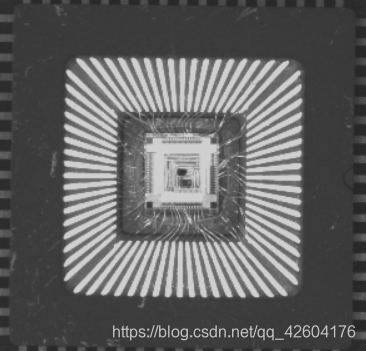
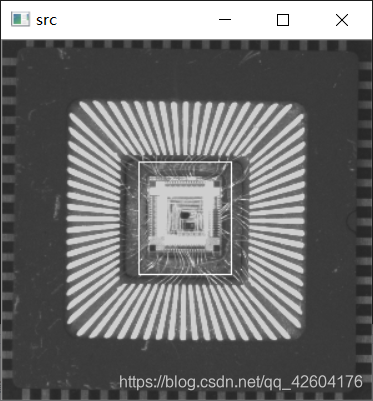
例2:找出芯片中间正方形物体
原图:
分析:
1、获取二值图像(选用二值化阈值或者canny算子扫描)
2、通过findContours函数寻找连通域,轮廓则是对应连通域的轮廓
3、通过minAreaRect函数获取轮廓最小矩形框(可旋转),利改矩形框的特征来锁定目标(这里我们限制,矩形框的长宽比值在1附近,并且矩形框的宽度大于10)
4、对锁定的轮廓,通过drawContours函数绘制轮廓
5、通过轮廓外最小矩形的四个顶点坐标,来绘制边框
另一种思路:
1、获取二值图像(这里为了使圆圈内部为白,使用反阈值)
2、利用connectedComponentsWithStats函数获取连通域矩阵
3、通过状态矩阵statsMat,来获取连通域最小外接四边形 (bounding box)的 x, y, width,height和面 积(像素数量)
4、通过四边形的条件来限制
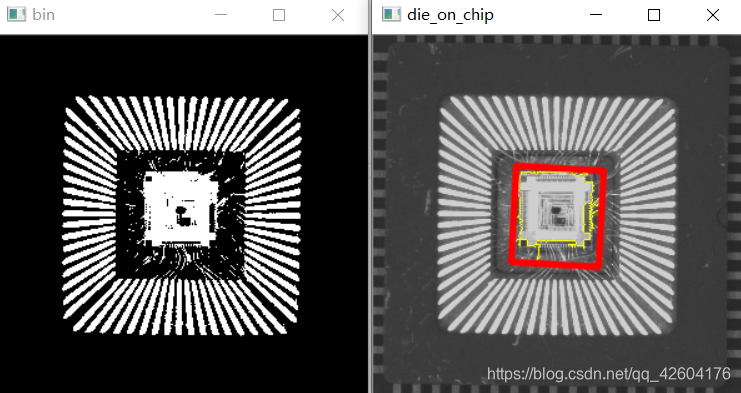
思路1代码:
*--------------------------【练习2】矩形框-------------------------------------*/
int main()
{cv::Mat srcMat = imread("D:\\opencv_picture_test\\轮廓\\die_on_chip.png", 1);Mat dstMat, binMat;cvtColor(srcMat, dstMat, COLOR_BGR2GRAY);threshold(dstMat, binMat, 0, 255, THRESH_OTSU);imshow("bin", binMat);//通过findContours函数寻找连通域vector<vector<Point>> contours;vector<Vec4i> hierarchy;findContours(binMat, contours, RETR_LIST, CHAIN_APPROX_NONE);//绘制轮廓for (int i = 0; i < contours.size(); i++) {RotatedRect rbox = minAreaRect(contours[i]);if (fabs(rbox.size.width * 1.0 / rbox.size.height - 1) < 0.1 && rbox.size.width > 10){drawContours(srcMat, contours, i, Scalar(0, 255, 255), 1, 8);Point2f vtx[4];rbox.points(vtx);for (int j = 0; j < 4; ++j) {cv::line(srcMat, vtx[j], vtx[j < 3 ? j + 1 : 0], Scalar(0, 0, 255), 3, LINE_AA);}}}imshow("die_on_chip", srcMat);waitKey(0);
}
思路2代码:
*--------------------------【练习1连通域解法】-------------------------------------*/int main()
{Mat lableMat;Mat statsMat;Mat centerMat;Mat srcMat = imread("D:\\opencv_picture_test\\轮廓\\die_on_chip.png", 1); //读取灰度Mat dstMat;cvtColor(srcMat, srcMat, COLOR_BGR2GRAY);//调用阈值函数threshold(srcMat, dstMat, 120, 255,THRESH_BINARY);//腐蚀操作//Mat element = getStructuringElement(MORPH_ELLIPSE, Size(9,9)); //morphologyEx(dstMat,dstMat, MORPH_ERODE, element); int nComp = cv::connectedComponentsWithStats(dstMat,lableMat,statsMat,centerMat,8,CV_32S);for (int i = 1; i < nComp; i++){cout << "pixels = " << statsMat.at<int>(i, 4) << endl;cout << "width = " << statsMat.at<int>(i, 2) << endl;cout << "height = " << statsMat.at<int>(i, 3) << endl;cout << endl;}for (int i = 1; i < nComp; i++){Rect bndbox;bndbox.x = statsMat.at<int>(i, 0);bndbox.y = statsMat.at<int>(i, 1);bndbox.width = statsMat.at<int>(i, 2);bndbox.height = statsMat.at<int>(i, 3);if (fabs(bndbox.width * 1.0 / bndbox.height - 1) < 0.2 && statsMat.at<int>(i, 4)>=1200)rectangle(srcMat, bndbox, CV_RGB(0, 255, 255), 1, 8, 0);}imshow("src", srcMat);//imshow("dst", dstMat);waitKey(0);
}
效果图:
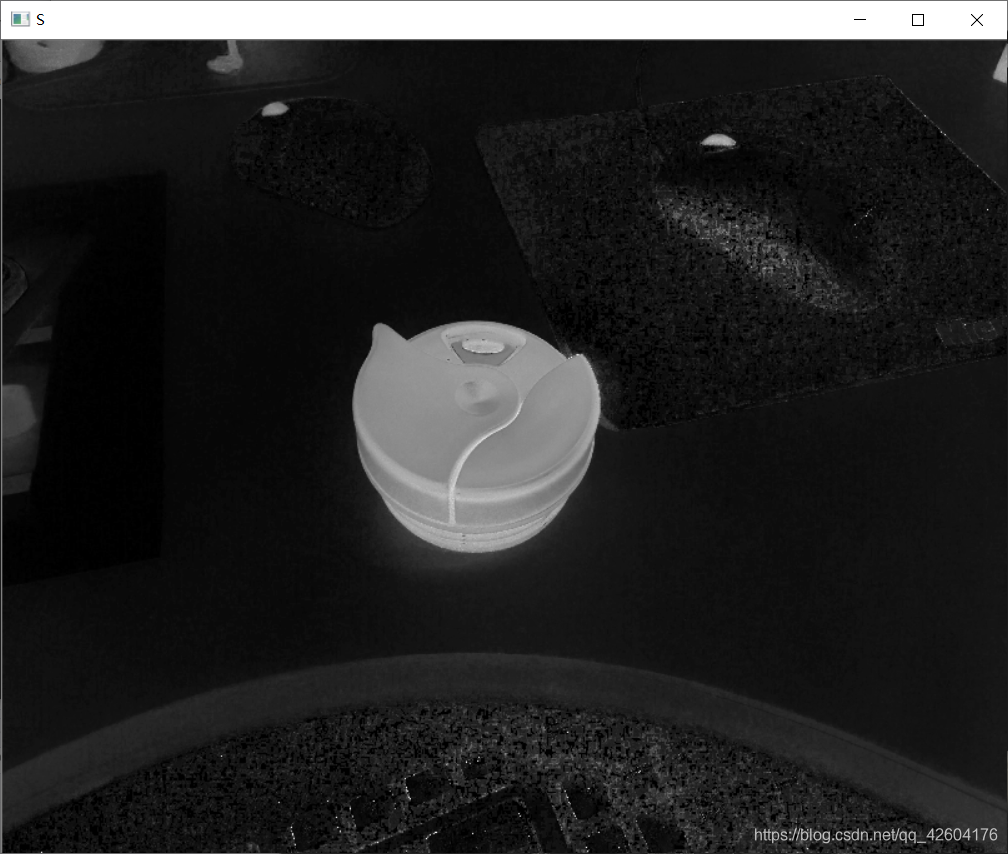
例3:桌面上橘色物体
分析:
1、RGB转HSV图
2、将HSV通道分离,获取三个通道值
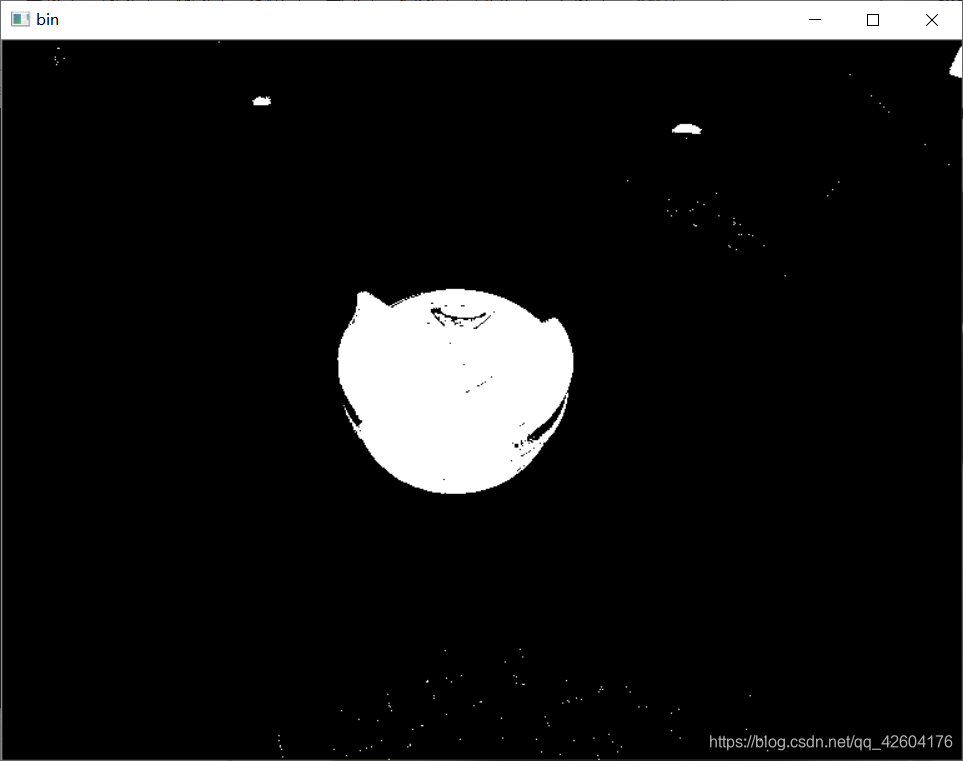
3、对S通道进行二值化处理
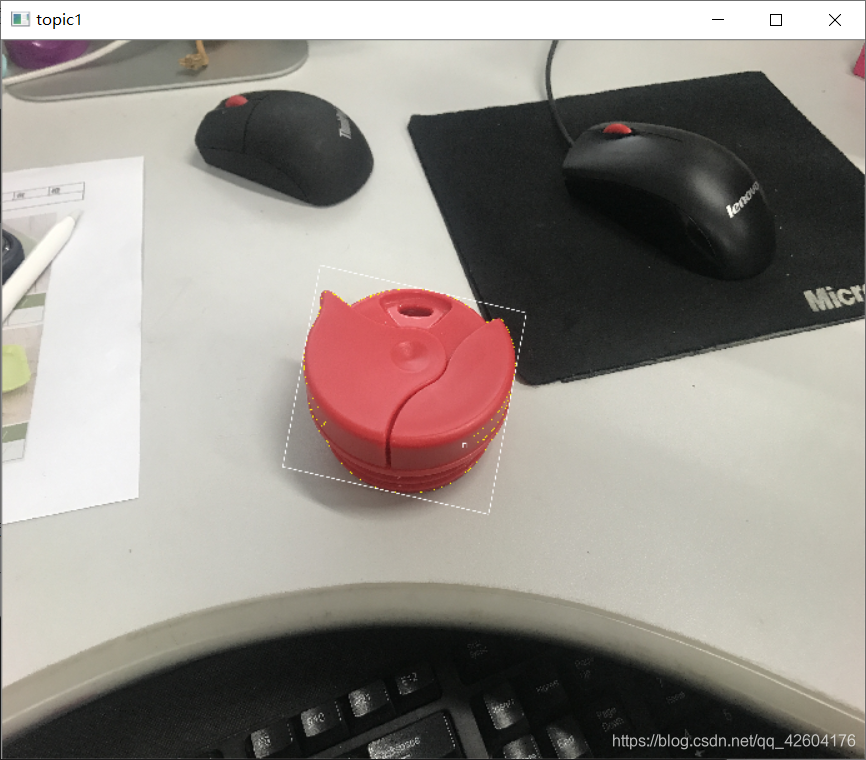
4、接下来按照上面两题的思路,找轮廓,框定。、
代码:
//*--------------------------【练习3】矩形框-------------------------------------*/
int main()
{cv::Mat srcMat = imread("D:\\opencv_picture_test\\轮廓\\topic1.jpg", 1);Mat dstMat, binMat;cvtColor(srcMat, dstMat, COLOR_BGR2HSV);vector<Mat> channels;split(dstMat, channels);//namedWindow("H", WINDOW_NORMAL);//WINDOW_NORMAL允许用户自由伸缩窗口//imshow("H", channels.at(0));namedWindow("S", WINDOW_NORMAL);//WINDOW_NORMAL允许用户自由伸缩窗口imshow("S", channels.at(1));//namedWindow("V", WINDOW_NORMAL);//WINDOW_NORMAL允许用户自由伸缩窗口//imshow("V", channels.at(2));//将S通道的图像复制,然后处理Mat S_Mat;channels.at(1).copyTo(S_Mat);//namedWindow("S", WINDOW_NORMAL);//WINDOW_NORMAL允许用户自由伸缩窗口//imshow("S", S_Mat);threshold(S_Mat, binMat, 120, 255, THRESH_BINARY);namedWindow("bin", WINDOW_NORMAL);//WINDOW_NORMAL允许用户自由伸缩窗口imshow("bin", binMat);//通过findContours函数寻找连通域vector<vector<Point>> contours;vector<Vec4i> hierarchy;findContours(binMat, contours, RETR_LIST, CHAIN_APPROX_NONE);//绘制轮廓for (int i = 0; i < contours.size(); i++) {RotatedRect rbox = minAreaRect(contours[i]);if (fabs(rbox.size.width * 1.0 / rbox.size.height - 1) < 0.3 && rbox.size.width > 10){drawContours(srcMat, contours, i, Scalar(0, 255, 255), 1, 8);Point2f vtx[4];rbox.points(vtx);for (int j = 0; j < 4; ++j) {cv::line(srcMat, vtx[j], vtx[j < 3 ? j + 1 : 0], Scalar(255, 255, 255), 2, LINE_AA);}}}namedWindow("topic1", WINDOW_NORMAL);//WINDOW_NORMAL允许用户自由伸缩窗口imshow("topic1", srcMat);waitKey(0);return 0;}
S通道图:
用S通道进行二值化:
框定图:
总结
从目前来看,框定目标物体我们从轮廓和连通域都可以。
其中,利用minAreaRect函数可以获取轮廓最小矩形框的参数值,也包括了轮廓的部分信息。
利用connectedComponentsWithStats获取连通域,可从中获取的连通域信息。
利用这些信息,结合矩形度、圆形度、宽长比等数学特征则可以剔除一些不符合特征的备选项。
这篇关于Opencv——findContours函数再探(由轮廓联想连通域)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!


