本文主要是介绍04 工程训练:如何减振,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
04 工程训练:如何减振
- 目录
- 1 振动信号分析基础
- 1.1 信号分析系统的组成
- 1.2 数字信号采集
- 1.2.1 步骤:
- 1.2.2 数字信号采集 - 采样
- 1.2.2 数字信号采集 - 采样定理
- 1.2.4 数字信号采集:频率混叠
- 1.2.5 数字信号采集:抗混叠方法
- 1.2.6 数字信号采集:量化
- 1.3 信号预处理
- 1.3.1 信号预处理:剔除异常点
- 1.3.2 信号预处理:去除均值和趋势项
- 1.3.3 信号预处理:重采样
- 2 背景介绍
- 2.1 振动的危害
- 2.2 振动机制的复杂性:流固耦合
- 2.3 机理与减振效果
- 3 振动机制
- 4 模态分析
- 4.1 模态分析概述
- 4.2 有限元分析
- 4.2.1 概念
- 4.2.2 求解过程
- 4.2.3 结果分析
- 4.2.4 避免共振
- 5 实验测量
- 5.1 实验装置
- 5.2 传感器固连方式
- 5.3 实验装置——数据采集系统
- 6 测量结果分析
- 6.1 幅值域分析
- 6.2 频域分析
- 6.3 时频域分析
- 7 隔振器设计
- 7.1 隔振器
- 7.2 固有频率选择
- 7.3 隔振实验
- 8 数字滤波器设计
- 8.1 滤波器基本概念
- 8.2 滤波器的选择
- 9 总结与未来展望
目录
- 振动信号分析基础
- 背景介绍
- 振动机制
- 模态分析
- 实验测量
- 测量结果分析
- 隔振器设计
- 数字滤波器设计
- 总结与未来展望
1 振动信号分析基础
1.1 信号分析系统的组成
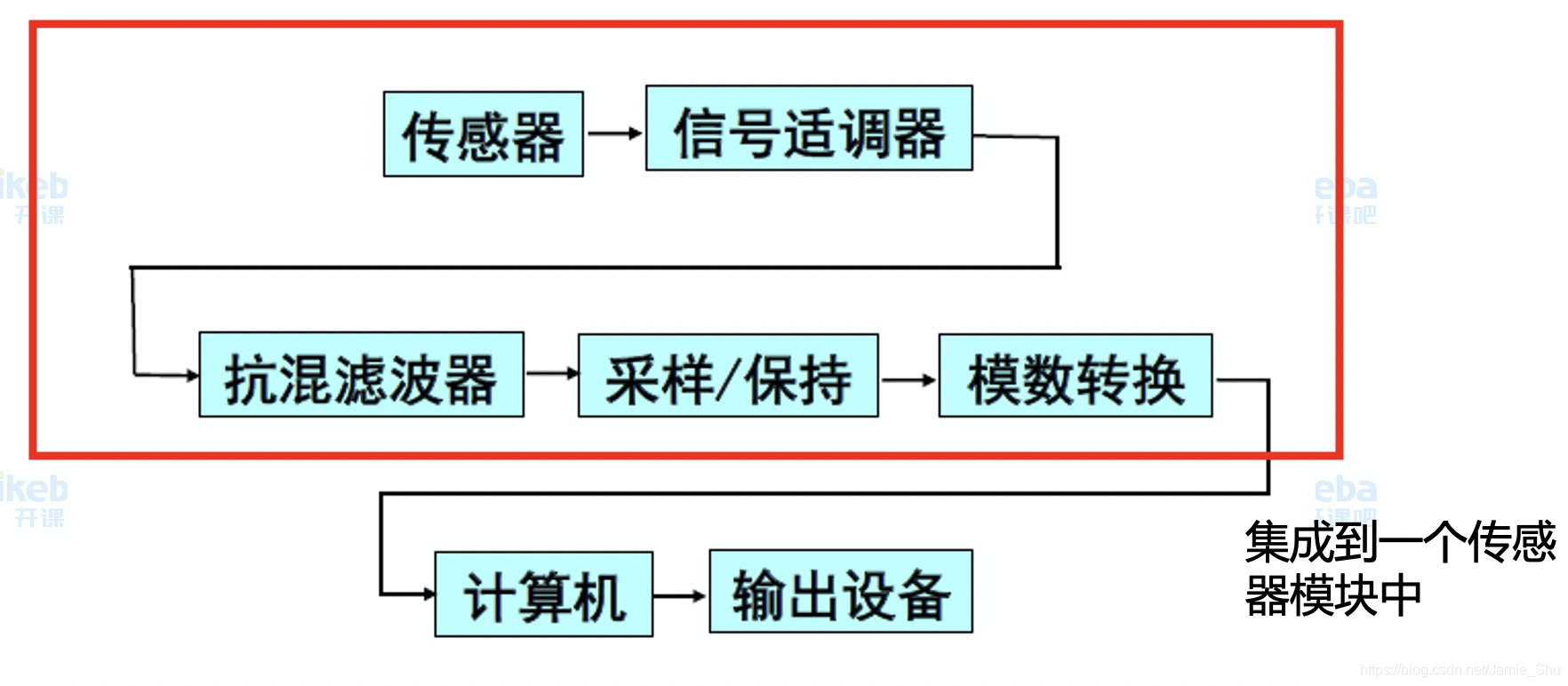
- 传感器:把需要测量的物理量进行采集(采集的物理量可能是电信号,可能很微弱)
- 信号适调器:将第一手的电信号进行处理(比如放大)
- 模数转换:只有数字信号,计算机才能处理
- 现在的传感器已经集成,这些传感器的输出是计算机可以处理的数字信号
1.2 数字信号采集
- 数字信号采集:将模拟信号转为数字信号的过程
- 模拟信号:时域和幅值域都连续的信号
- 数字信号:时域和幅值域都离散的信号
1.2.1 步骤:
- 采样(时域上的离散)
- 量化(幅值域上的离散)
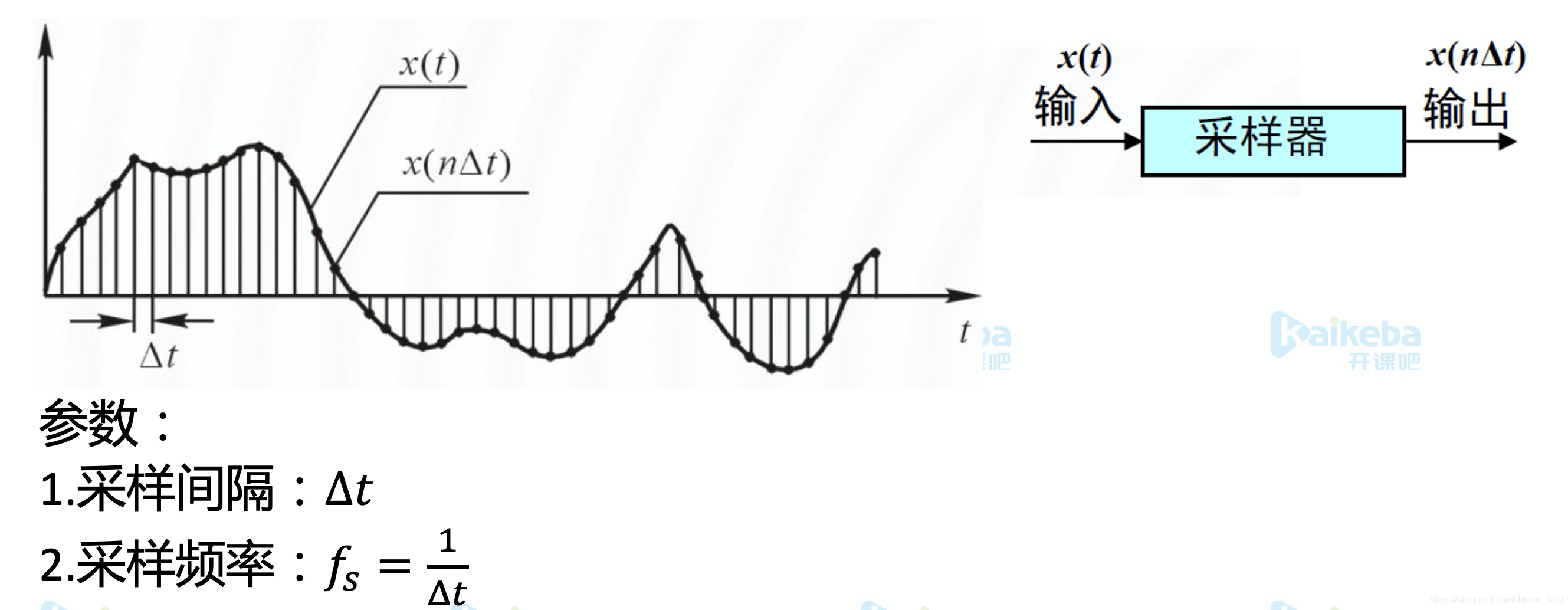
1.2.2 数字信号采集 - 采样
采样:将模拟信号在指定时刻采集下来 ,并保持一段时间。
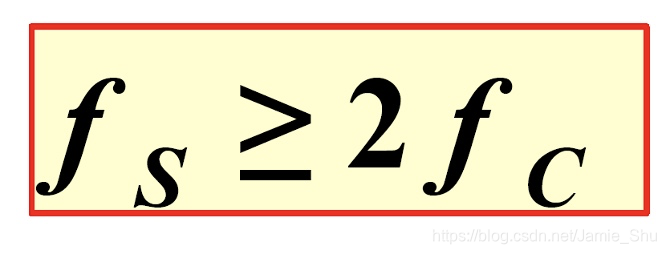
1.2.2 数字信号采集 - 采样定理
如果要从采样信号中完全重建原信号,则采样频率 𝑓_𝑠至少应为原信号截止频率𝑓_𝑐的两倍,即
1.2.4 数字信号采集:频率混叠
当采样频率不能满足采样定理要求时,将会发生原信号高频成分(𝒇>𝒇_𝒔/𝟐)被折叠到低频成分上的现象。能相互混淆的频率:
- f1: 会发生混叠的频率
- f2: 原信号频率
- f3: 采样频率
[例]
- 100 = -400 + 500
- 100 = -900 + 500*2

[注] 傅立叶变换:
(把一个时域信号,做了傅立叶变换后,会变换成什么?)
- 一系列的频率(该信号里包含率多少频率)
- 每个频率下,它的振幅是多大
- 每个频率,相位是多少
https://www.bilibili.com/video/BV1A4411Y7vj/?spm_id_from=333.788.videocard.0https://www.bilibili.com/video/BV1pW411J7s8?from=search&seid=4610483043952263904
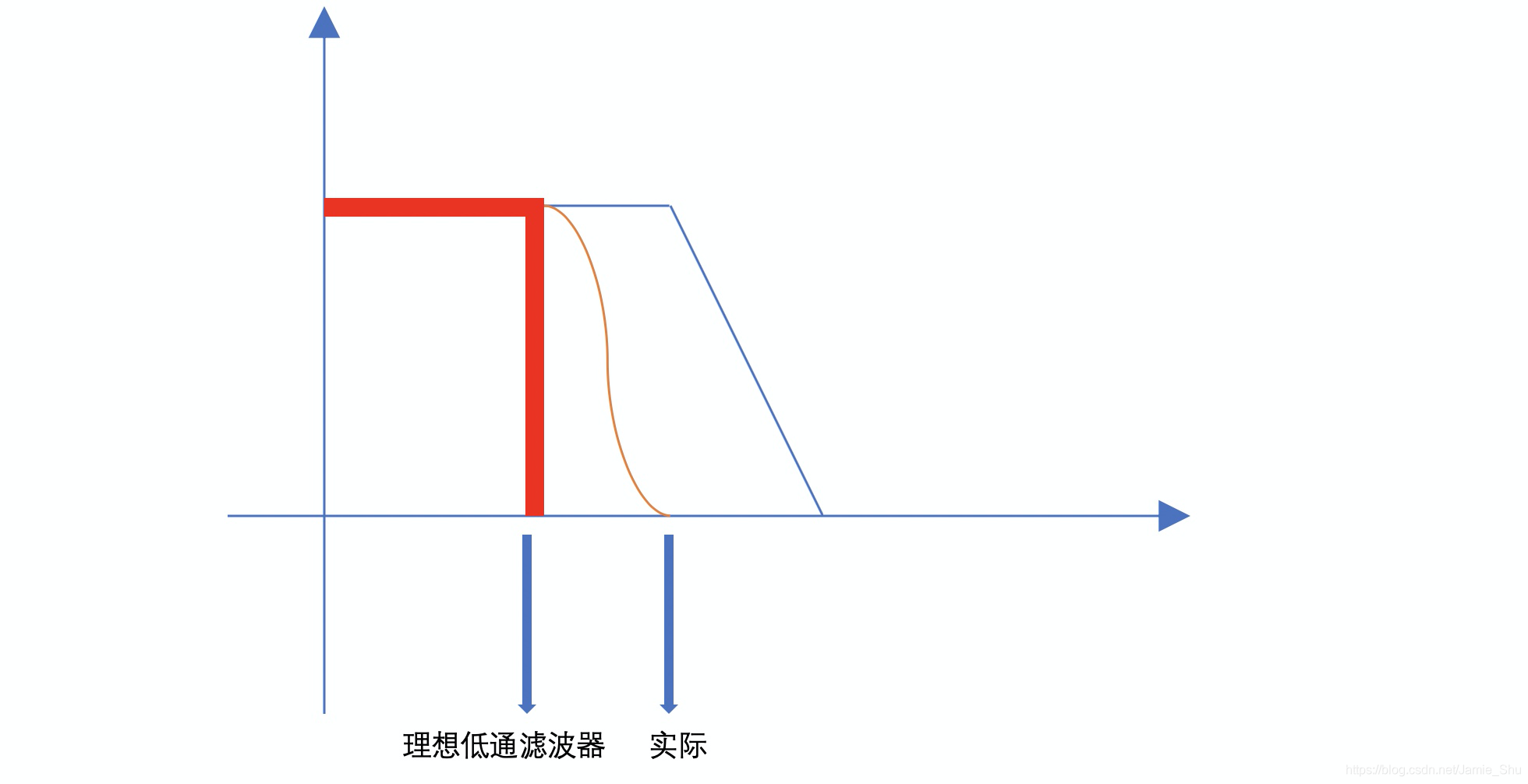
1.2.5 数字信号采集:抗混叠方法
- 提高采样频率
l 将增大数据量,并降低频率分辨率 - 采用抗混叠滤波器
l 采用模拟低通滤波器将不感兴趣或不需要的高频成分滤掉。
- 由于实际滤波器不是理想滤波器,因此
𝑓_𝑠取(2.5~5)𝑓_𝑐
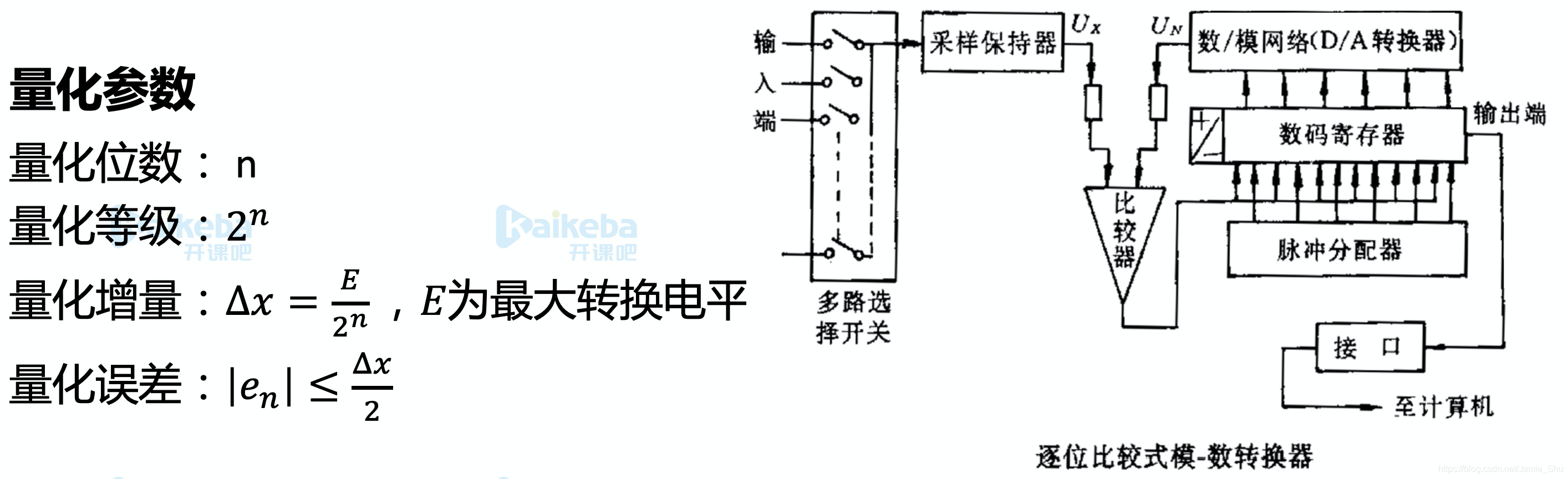
1.2.6 数字信号采集:量化
将采样点的信号幅值与一组离散电平值比较,以最接近的电平值代替原信号幅值,并变成有限长的二进制数字序列。
- 因为幅值也是连续的,而计算机无法存取连续,就要幅值离散化。
- 根据数码寄存器输出的离散电平,与输出信号比较,和哪个电平近就作为采样保持器输出电平的一个近似
[例]
幅值为40m/s的加速度计8位256最小值40/256
1.3 信号预处理
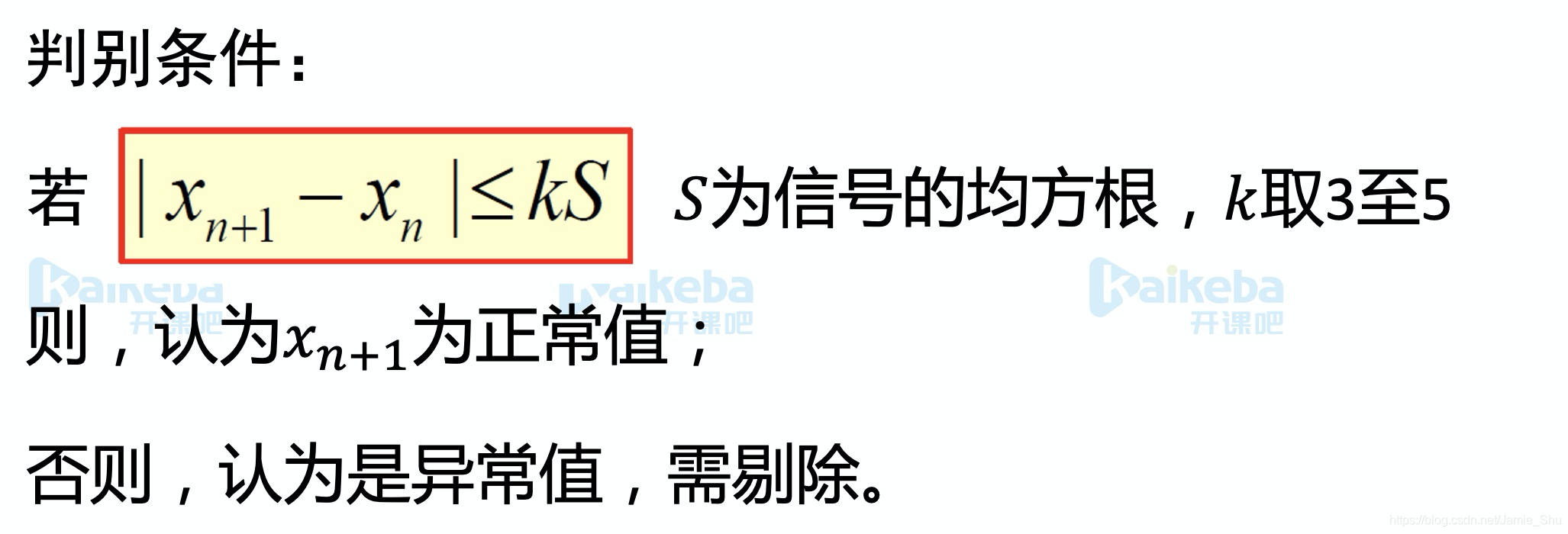
1.3.1 信号预处理:剔除异常点
在数据测量、记录、传输等过程中,因突然受严重噪声干扰、信号丢失、传感器失灵等因素,使记录信号引入一些 异常的虚假值。
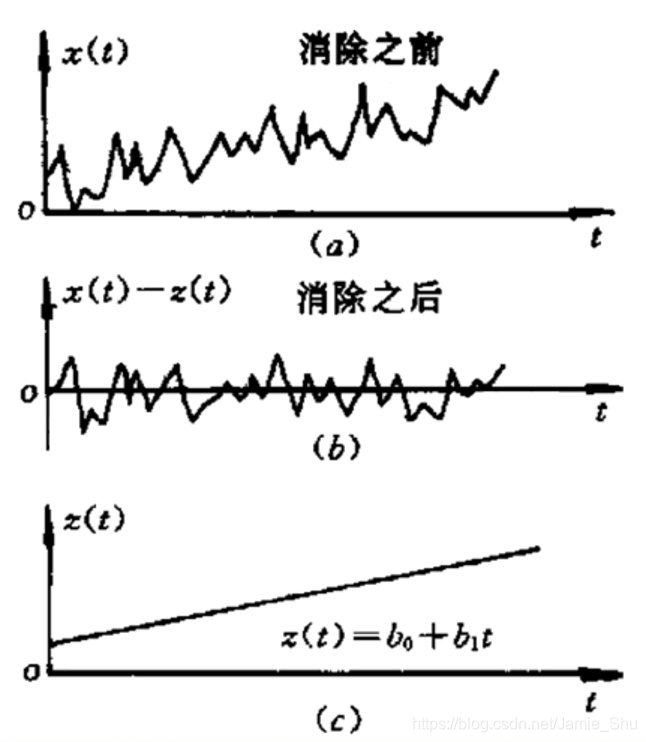
1.3.2 信号预处理:去除均值和趋势项
周期大于记录长度的频率成分,称做 趋势项。
- 去除目的:
- 避免后续处理出现过高的低频分量而溢出。
- 去除步骤:
- 用最小二乘法对信号进行多项式拟合
- 减去拟合函数值。
- 不去除的方法:
- 别从很低频率开始画,如画图时从
f=0.1开始画
- 别从很低频率开始画,如画图时从
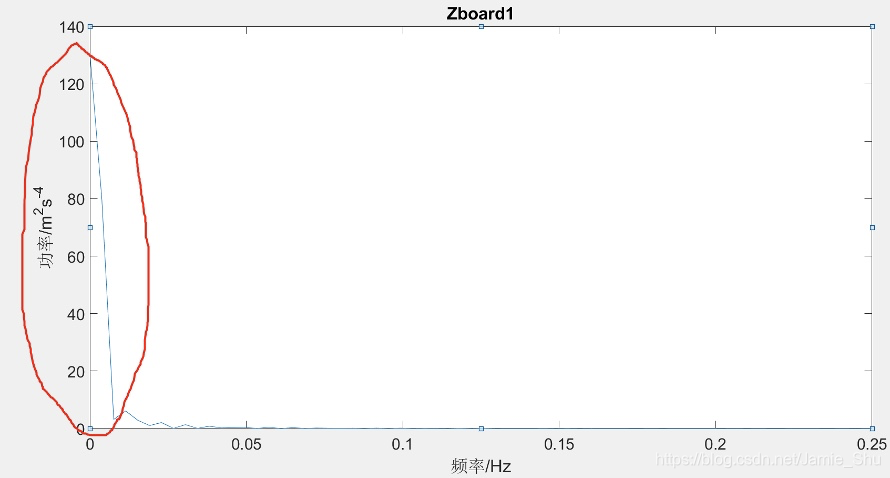
如正常功率 0.01级,而低频功率飙到100多,那后面的量就看不见了
1.3.3 信号预处理:重采样
- 简单的来说,重采样(resample)就是 改变采样率;
- 降低采样率为降采样(downsample),增大采样率为增采样(upsample)。
- 可以对均匀采样的信号进行重采样,也可以对非均匀采样的信号进行重采样。
- 均匀点重采样:
https://ww2.mathworks.cn/help/signal/examples/resampling-uniformly-sampled-signals.html- 非均匀点重采样:
https://ww2.mathworks.cn/help/signal/examples/resampling-nonuniformly-sampled-signals.html- 重建(数据丢失情况):
https://ww2.mathworks.cn/help/signal/examples/reconstructing-missing-data.html
2 背景介绍
2.1 振动的危害
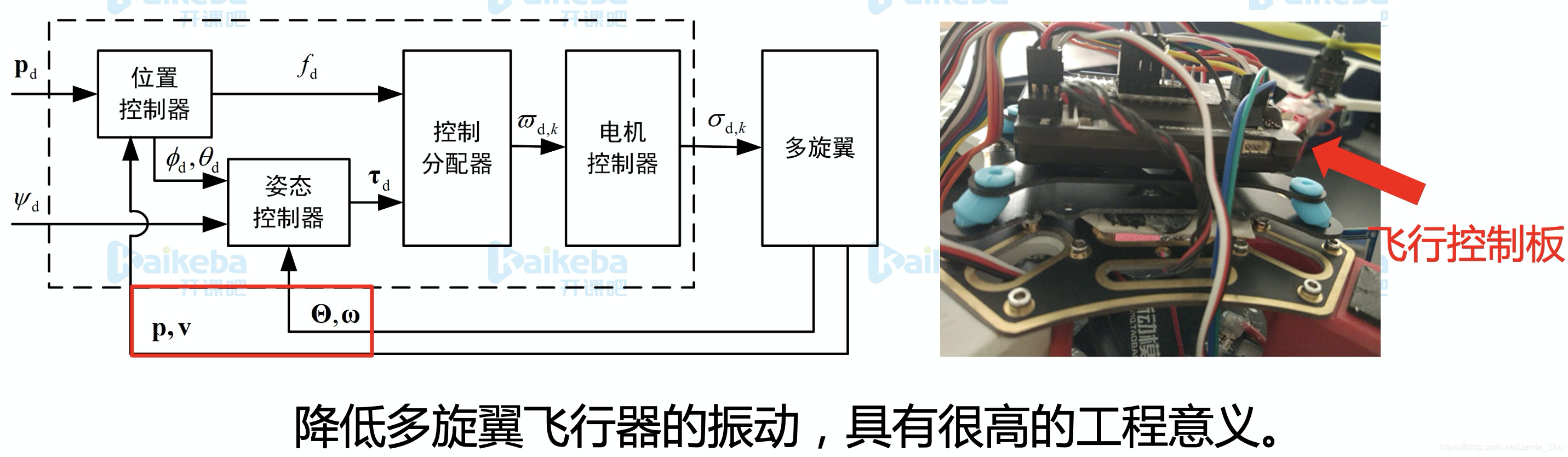
多旋翼飞行器振动的主要危害:
- 飞行控制板极易受到振动信号的干扰,导致控制系统的反馈检测失真,极大影响飞行控制。
- 而对于一个深度负反馈的自动控制系统,反馈测量受到干扰,对系统是致命的。
2.2 振动机制的复杂性:流固耦合
- 即 振动来源比较复杂
- 流体与固体两种场之间耦合在一起的力学机制
2.3 机理与减振效果
- 振动研究、减振的整个处理流程
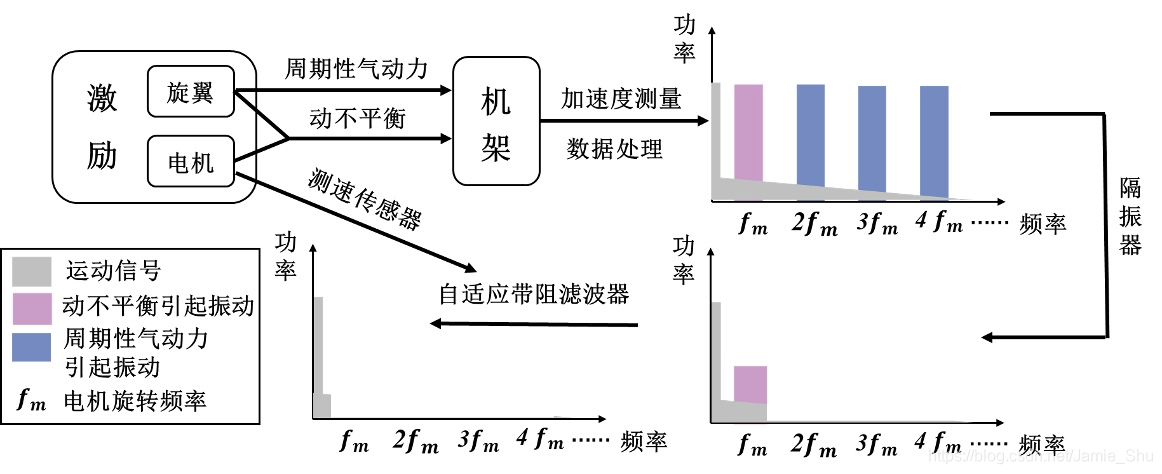
本工作系统地梳理多旋翼飞行器的振动问题,并给出有效且工程上可行的减振方案。所涉及的硬件、单片机程序、实验数据、数据处理程序、滤波器程序、3D模型和模态云图等
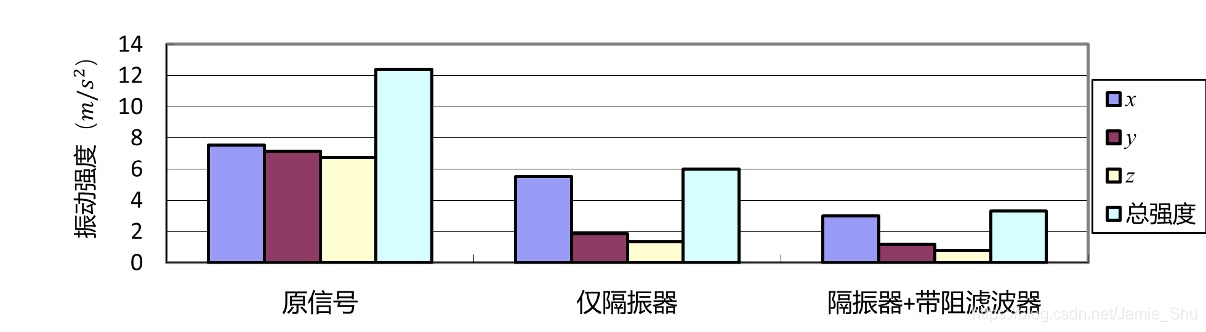
[总结]
隔振器+带阻滤波器能起到一个很好的减振效果,得到这样的结果后,再使用该信号做状态估计,再给到控制器,就能有一个比较好的控制效果
3 振动机制
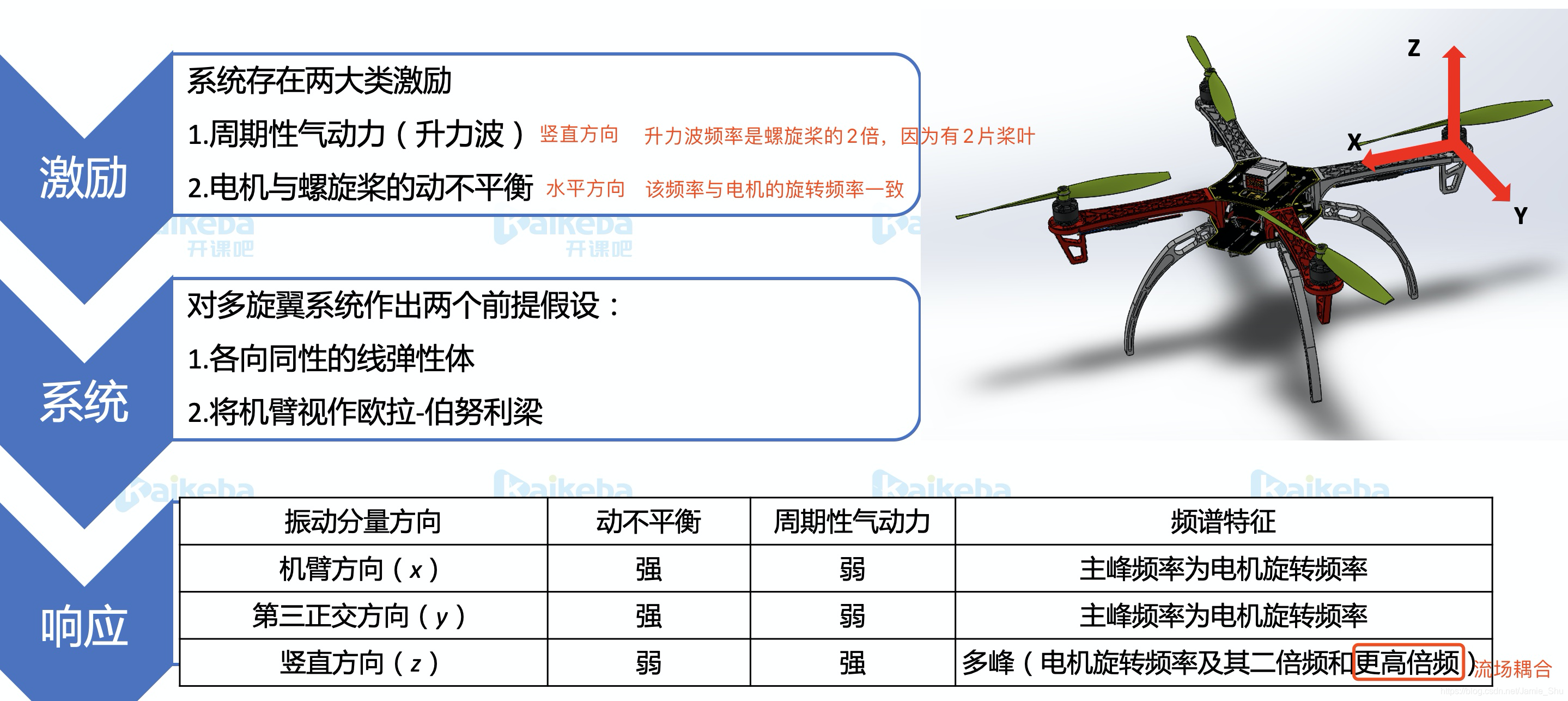
一个振动系统都由3部分组成:激励、系统、响应
- 激励经过系统从某个地方输出响应
[注]
欧拉-伯努利梁欧拉-伯努利梁的基本假设:
- 均匀、连续、各向同性
- 小形变假设:线弹性材料;𝜎_𝑦 和𝜎_𝑧相对于𝜎_𝑥 很小,可忽略
- 平面假设:梁具有纵向对称面,弯曲振动始终在这一平面内;且变形后的横截面与轴线保持垂直;
- 假设梁的长度大于截面高度10倍以上,忽略转动惯量和剪切形变的影响。
4 模态分析
4.1 模态分析概述
- 模态是指机械结构的固有振动特性,每一个模态都有特定的
固有频率、阻尼比和模态振型。 - 模态分析就是通过计算或实验的方法来获得这些模态参数的过程。
- 目的:
- 对于本任务,观察模态振型找出振幅最小的位置,给惯性测量单元(传感器、飞控)的空间布局提供参考;
- 并根据获得的固有频率给出避免共振的方法。
4.2 有限元分析
4.2.1 概念
先给对象建一个模型,赋予它一些材料属性,对该数学模型使用有限元方法来求解它的模态。
- 有限元分析(FEA,Finite Element Analysis) 利用有限数量的单元,去逼近无限未知量的真实系统,从而将偏微分方程(无限维)转换为常微分方程(有限维)。
- 有限元模态分析:将一个弹性连续体的振动问题,离散为一个以有限个节点位移为广义坐标的多自由度系统的振动问题,再用模态叠加法求解
- 画网格
- 常用软件:
ANSYS,ABAQUS,COMSOL
详细请参考
https://zhuanlan.zhihu.com/p/56326567
4.2.2 求解过程
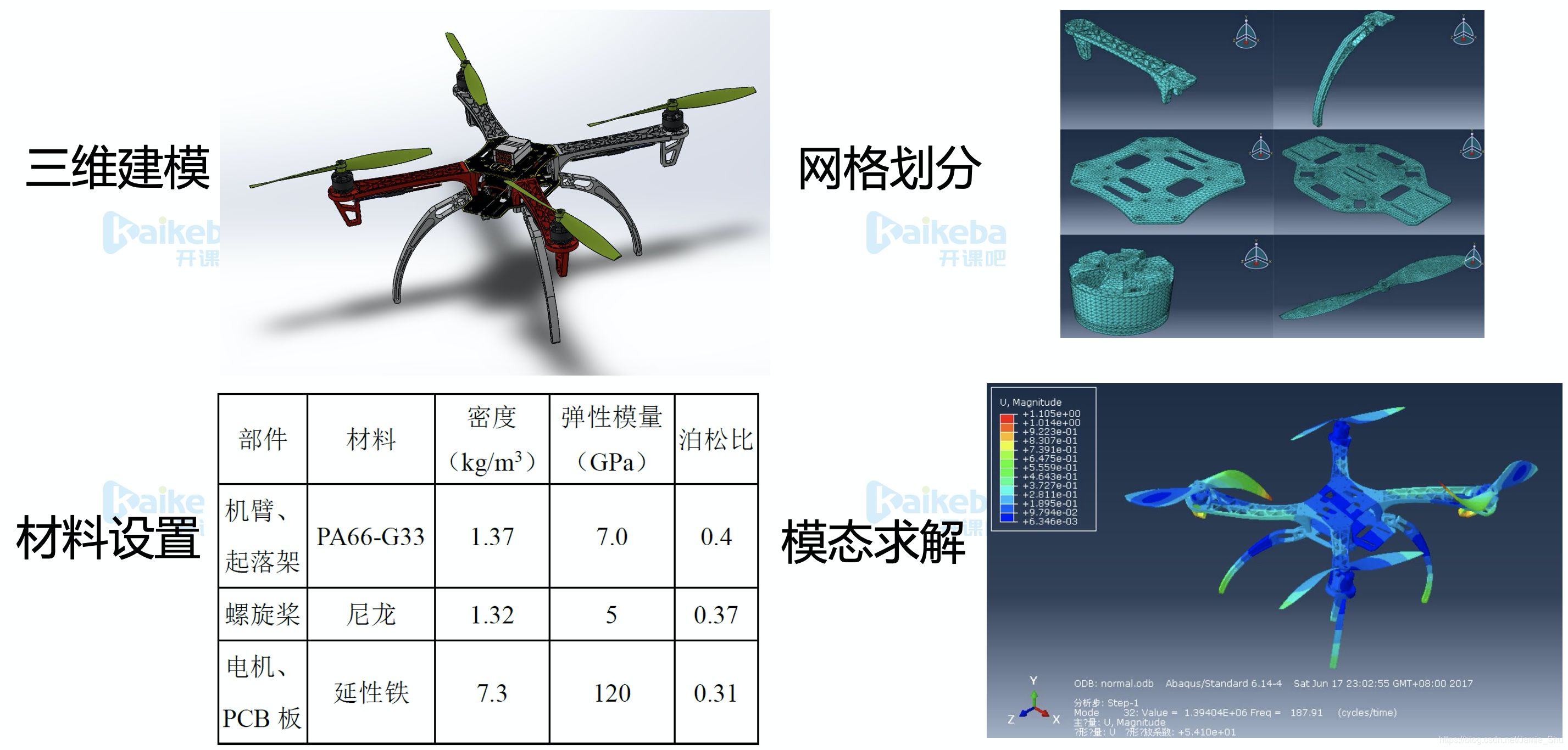
4.2.3 结果分析
分析了固有频率截止到355.53Hz的模态,共50阶模态云图,得到了如下结论:
- 大多数模态中,旋翼和脚架的形变最大,原因是二者细长且材料刚度不足。
- 机臂形变较大的模态只有三个,观察这三个模态振型,可以看出机臂中间段形变大于外段和内段。进而可以推测机臂中间段平均振幅最强。
- 所有模态的机架中部,形变都很小,说明这里是布置飞行控制器所需惯性测量单元的理想位置。

4.2.4 避免共振
旋翼的转速由动力系统设计决定,再不能更改的前提下,可以通过改变结构参数避免共振
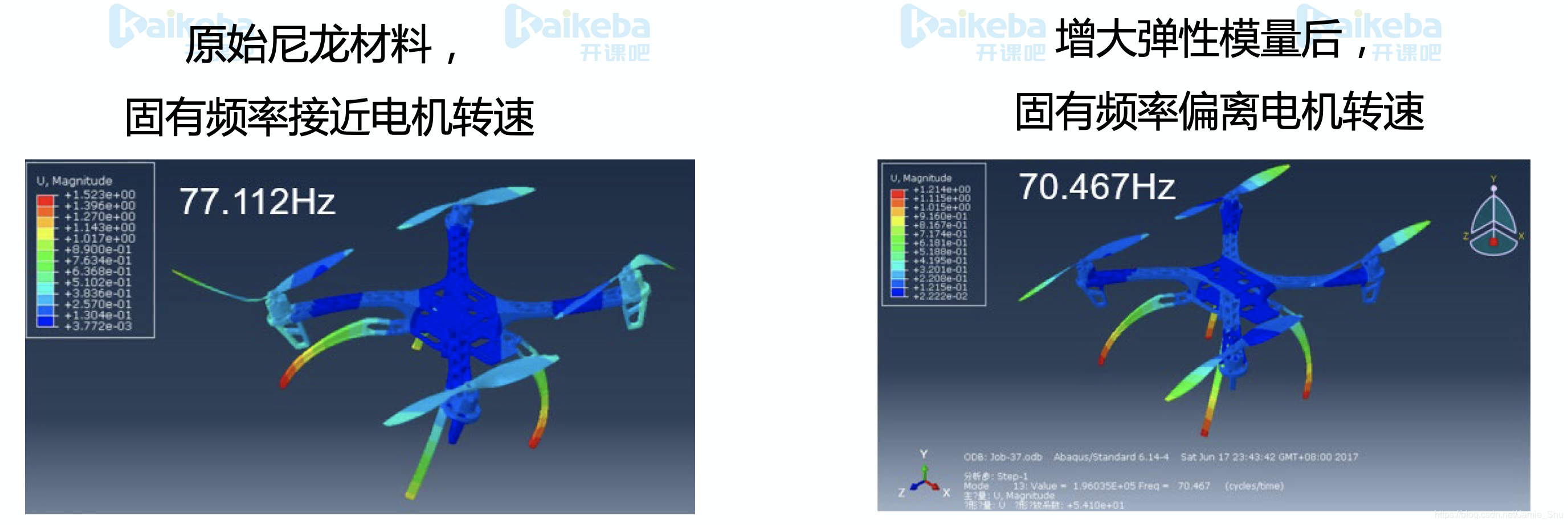
- 改变材质,改变固有频率
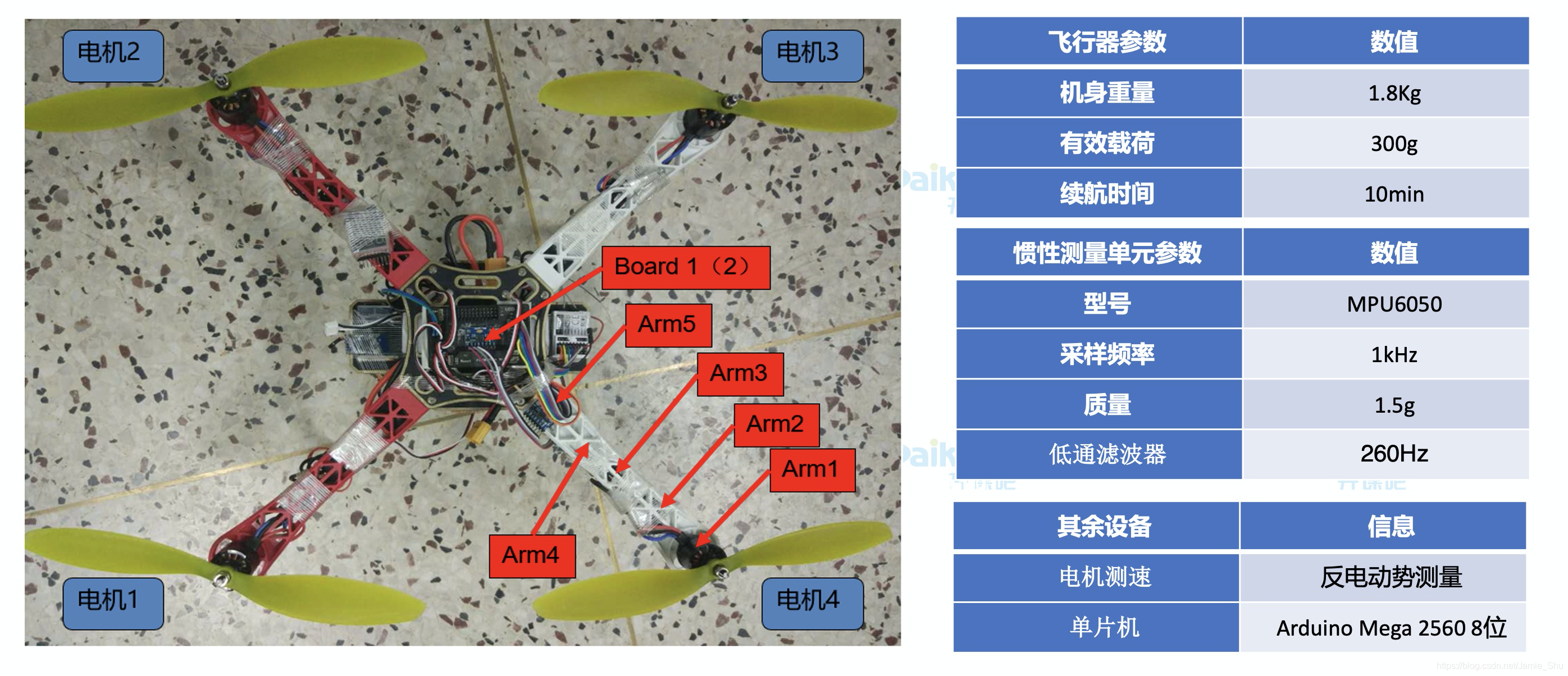
5 实验测量
5.1 实验装置
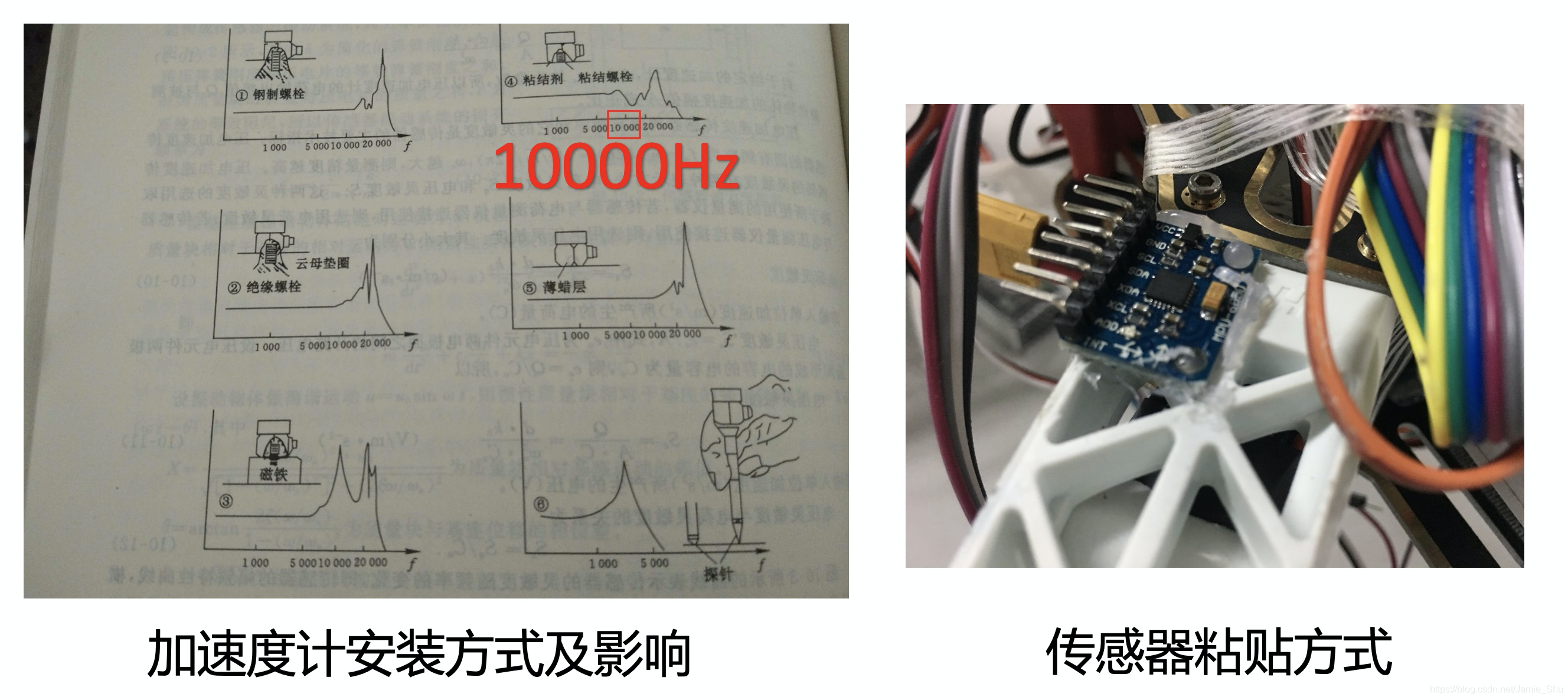
5.2 传感器固连方式
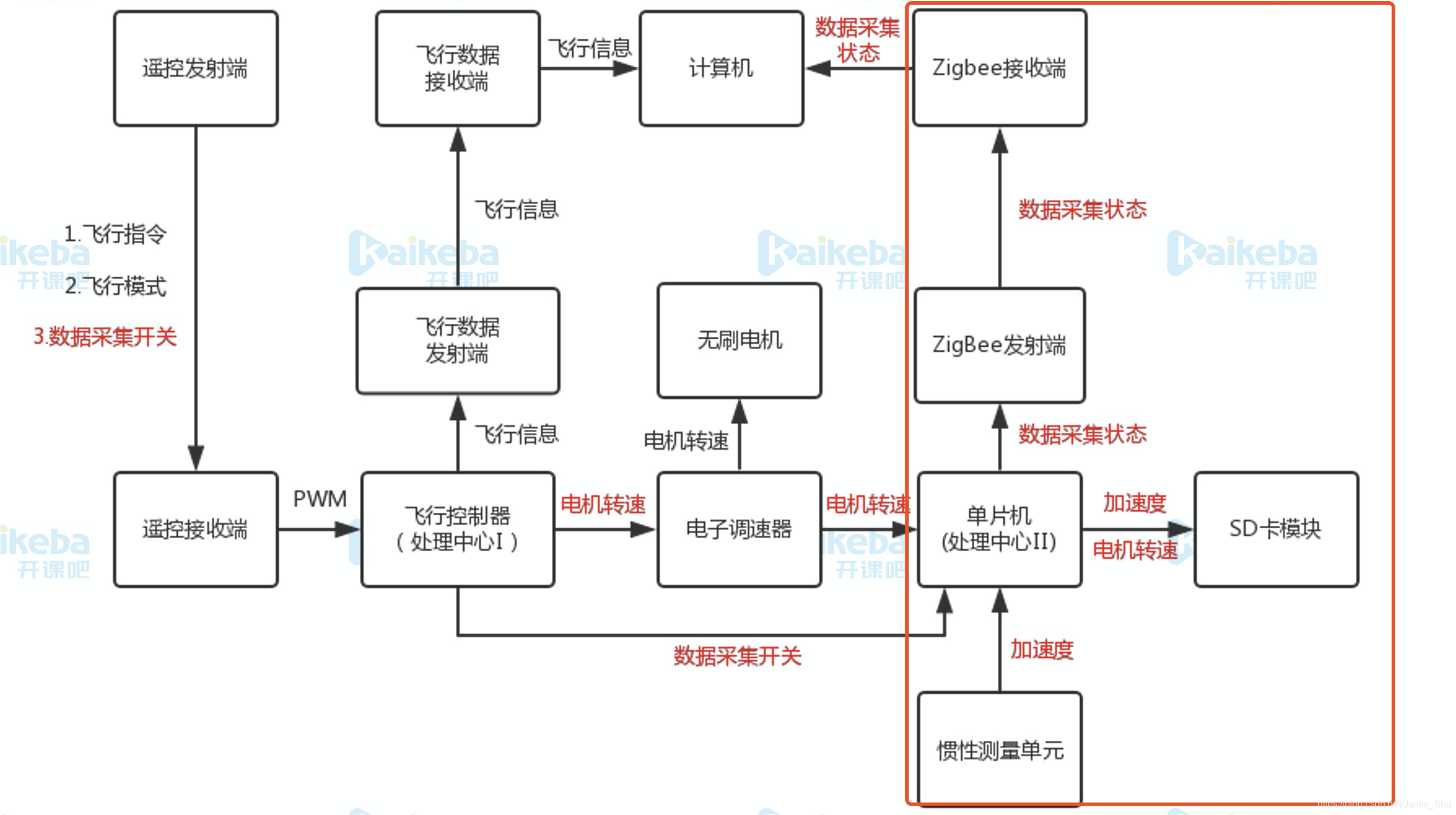
5.3 实验装置——数据采集系统
6 测量结果分析
6.1 幅值域分析
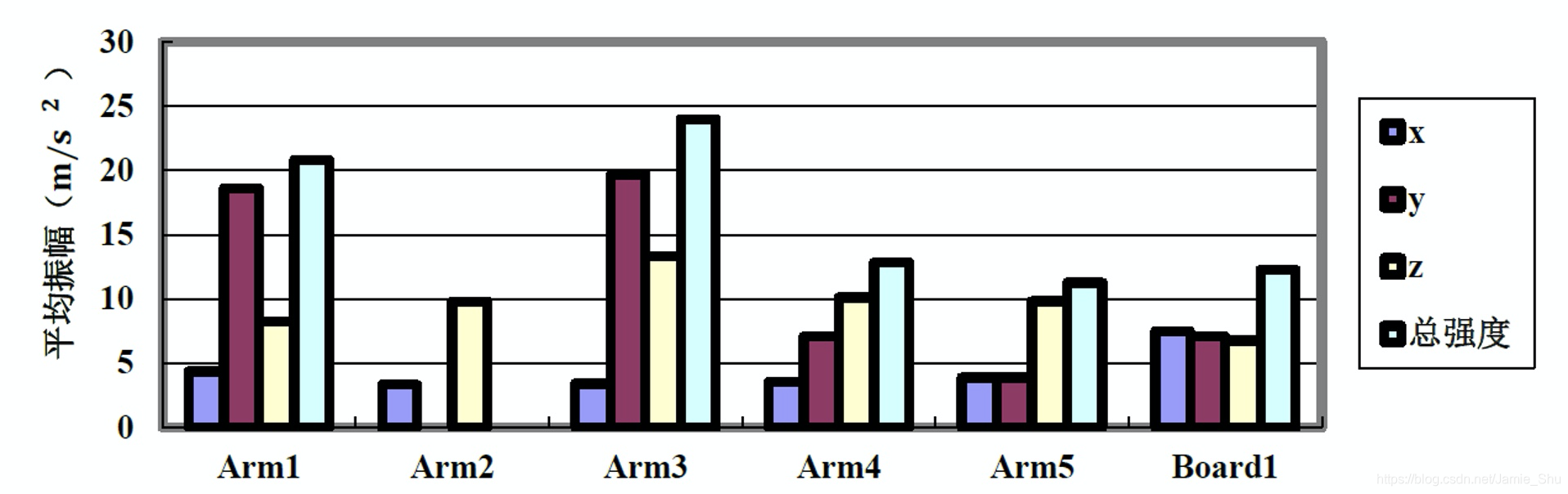
- 整个机臂可以看作为一根空间梁,y轴和 z 轴方向为横向弯曲振动问题,x 轴方向为轴向拉压振动问题,力学差异明显。因此,x 轴的平均振幅分布规律明显不同于 y 轴和 z 轴。
- 总平均振幅与有限元模态分析的结果大体一致,机臂中间段平均振幅最大,外段和内段小。机架中心平均振幅尽管不是最小,但接近最小值(Arm5)。
6.2 频域分析
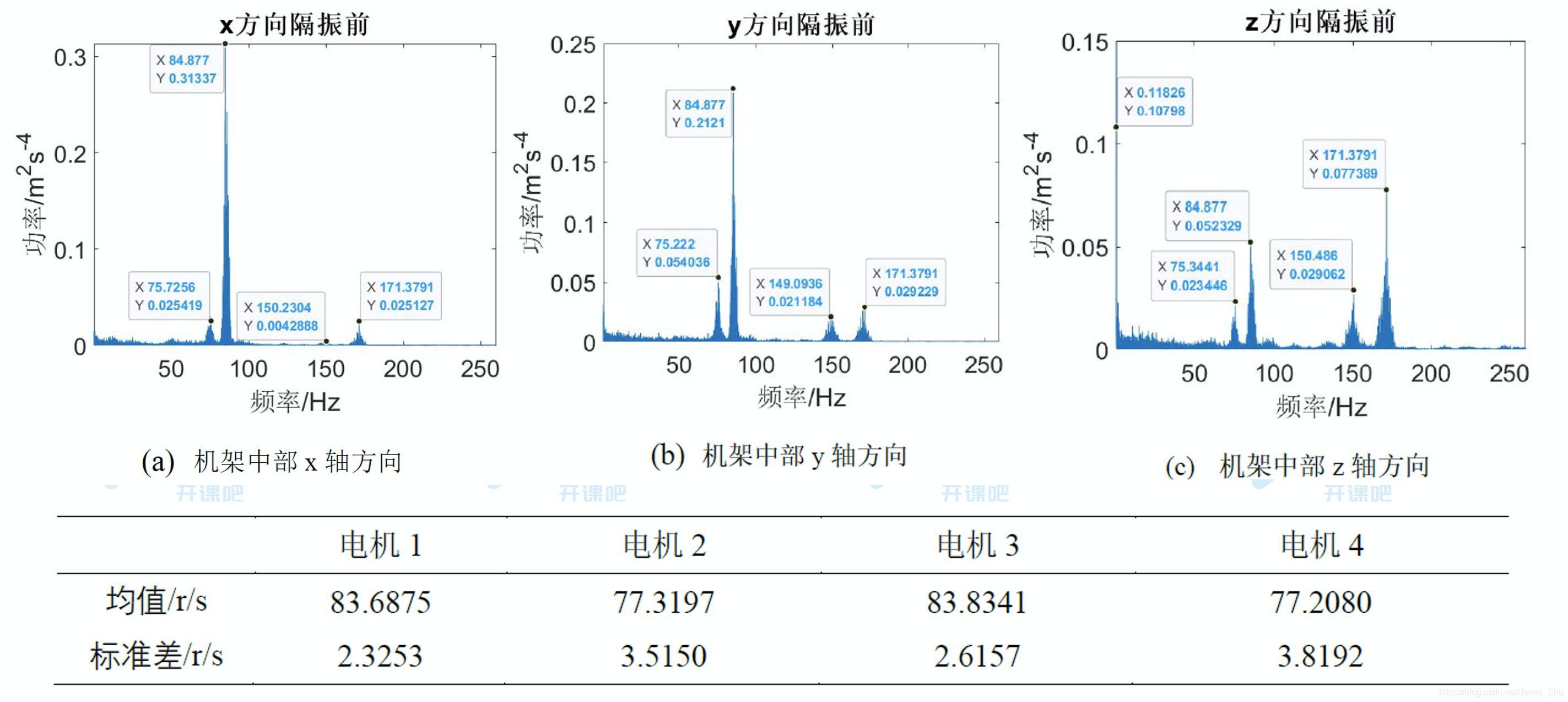
- x, y 方向,1倍频较大(动不平衡);z方向,电机旋转的2倍频较大(气动力) – 符合振动机制分析
- 2个峰的原因:4个旋翼转速不同
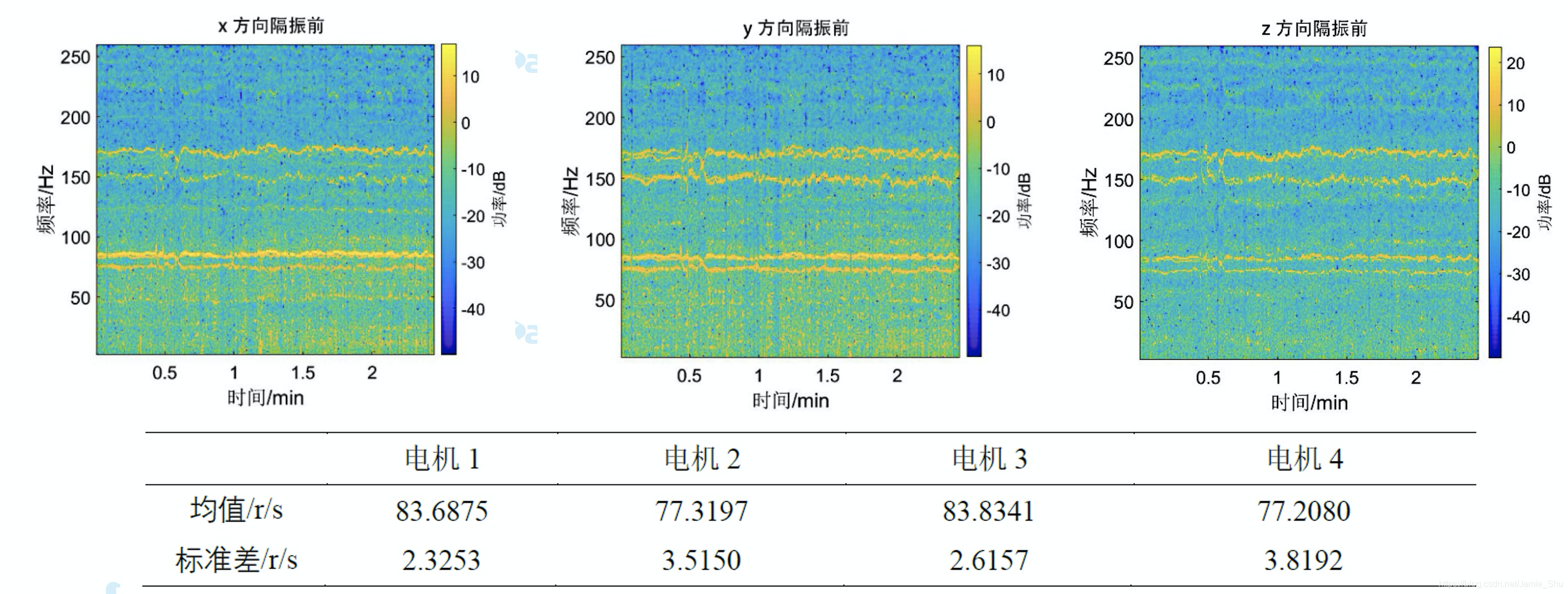
6.3 时频域分析
- 对采集到的加速度信号进行短时傅里叶变换,得到时频谱。可以看出,高亮谱线几乎平行于横轴,有小幅波动,这是因为电机转速并不是恒定的,会有小幅波动,但总体是平稳的
- 进一步证明了振动信号基频为电机转速这一结论。
7 隔振器设计
7.1 隔振器
- 隔振器是连接设备和基础的弹性元件与阻尼元件,用以减少和消除由设备传递到基础的振动力和由基础传递到设备的振动。
- 在本问题中,基础是机架中部,设备是惯性测量单元。
7.2 固有频率选择
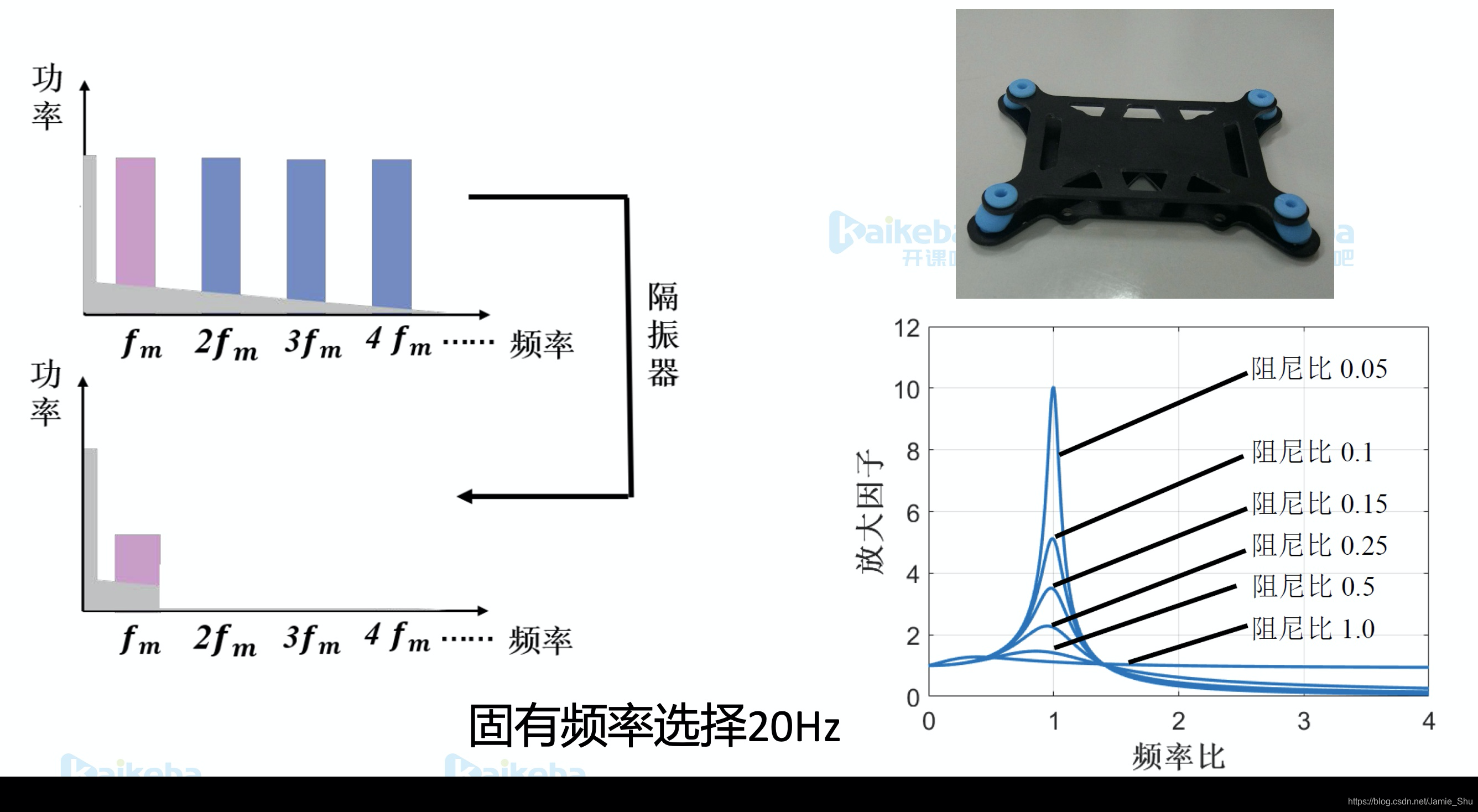
[注]
频率比 = 振动频率(信号频率) / 隔振器固有频率
- 频率比越大,放大因子小 —— 希望放大因子是0
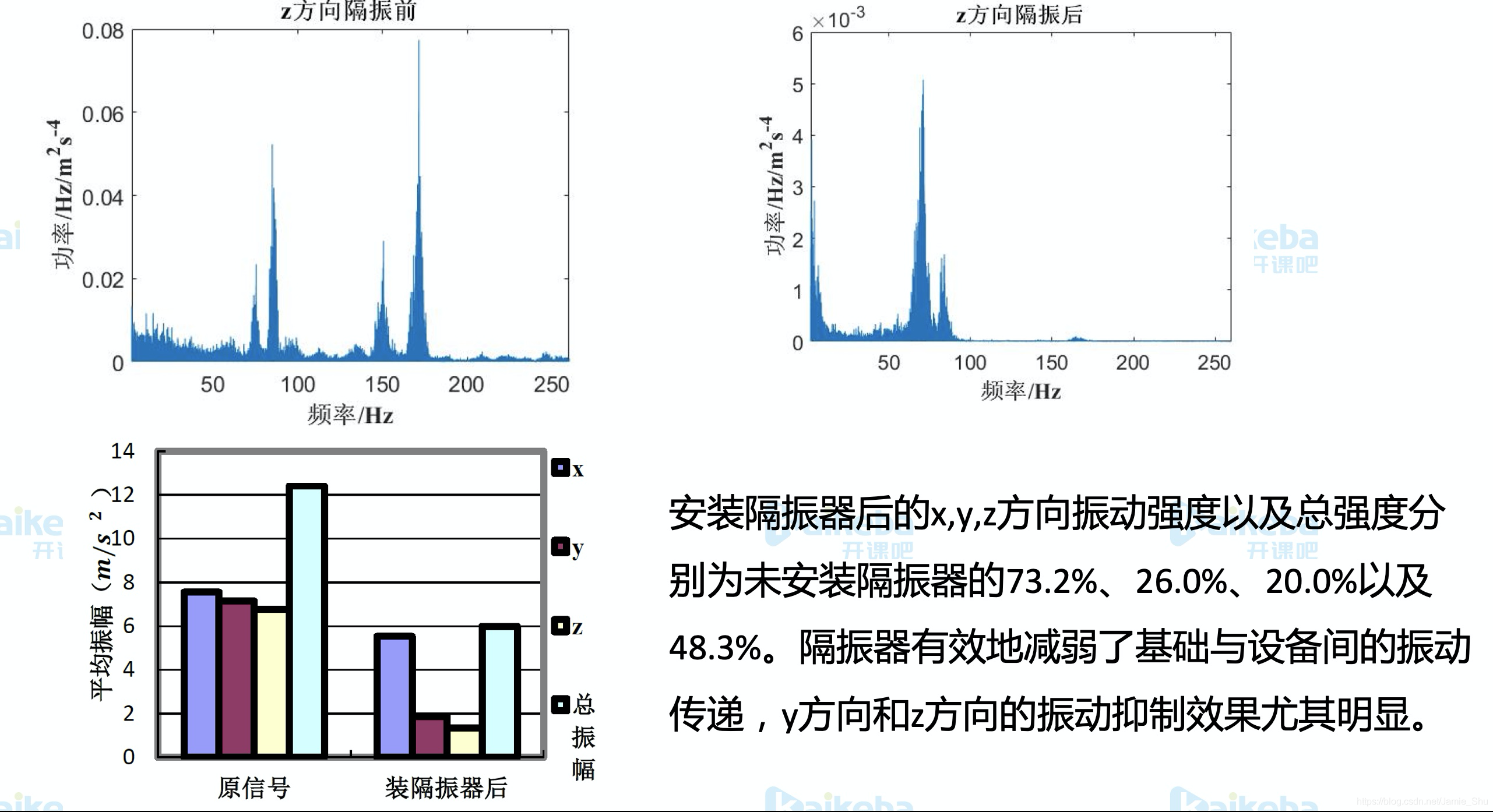
7.3 隔振实验
经过隔振器后,已经滤除了绝大多数的振动信号。
8 数字滤波器设计
8.1 滤波器基本概念
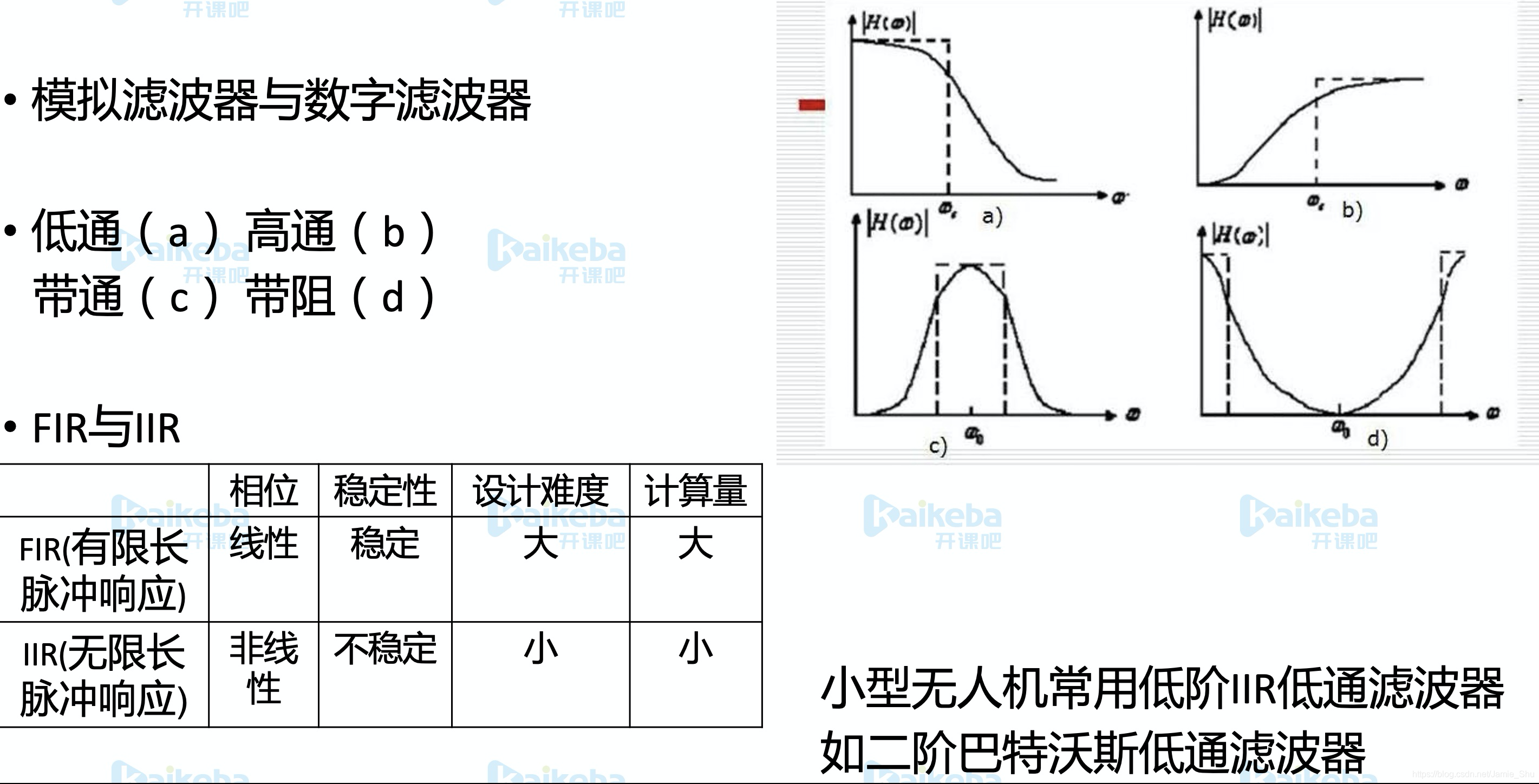
8.2 滤波器的选择
- 低通滤波器存在两个缺陷。
- 一是造成了较大的相位滞后,这种滞后可能导致姿态控制超调甚至发散;
- 第二点是由于真实的运动信号有非周期项,频域上会铺满整个频谱,低通滤波器的引入使得这部分信号失真。
- 陷波器通常指二阶带阻滤波器,其设计简单程度和运算速度与二阶低通滤波器相当,适合工程应用。然而由于陷波器只是二阶,能消除的频带过窄。
- 带宽更宽的带阻滤波器,可以达到更好的效果
[注]
如果电机转速变化了,怎么办?
- 转速改变时,把转速(前提是要能测到转速)传到表达式中,所对应滤波器也随之改变 —— 自适应的带阻滤波器
9 总结与未来展望
未来工作:
- 隔振器和数字滤波器的引入会导致 相位 的变化,如何在状态估计器(如卡尔曼滤波器)设计时,补偿前两者造成的相位变化,是后期研究的重点。
- 此外,通过优化飞行器质量分布进行减振,也是后期的研究工作。
这篇关于04 工程训练:如何减振的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!








