减振专题

基于LQR控制算法的电磁减振控制系统simulink建模与仿真
目录 1.课题概述 2.系统仿真结果 3.核心程序与模型 4.系统原理简介 5.完整工程文件 1.课题概述 基于LQR控制算法的电磁减振控制系统simulink建模与仿真。仿真输出控制器的收敛曲线。 2.系统仿真结果 3.核心程序与模型 版本:MATLAB2022a 08_029m 4.系统原理简介 电磁减振控制系统采用线性二次型调节器
多旋翼无人机振动分析与减振方法
多旋翼无人机振动分析与减振方法 振动分析无人机减振设计机械减振数字滤波减振 振动分析 振动机制包括: 激励(振动源)系统响应 无人机振动机制: 激励 —— 动力系统(旋翼+电机)系统 —— 机架响应 —— 传感器(惯导) 无人机振动来源: 动不平衡,振动频率等于旋转频率单个旋翼产生的周期性气动力(升力波),引起的振动二次谐波多个旋翼流场相互耦合产生的二次以上的谐波
04 工程训练:如何减振
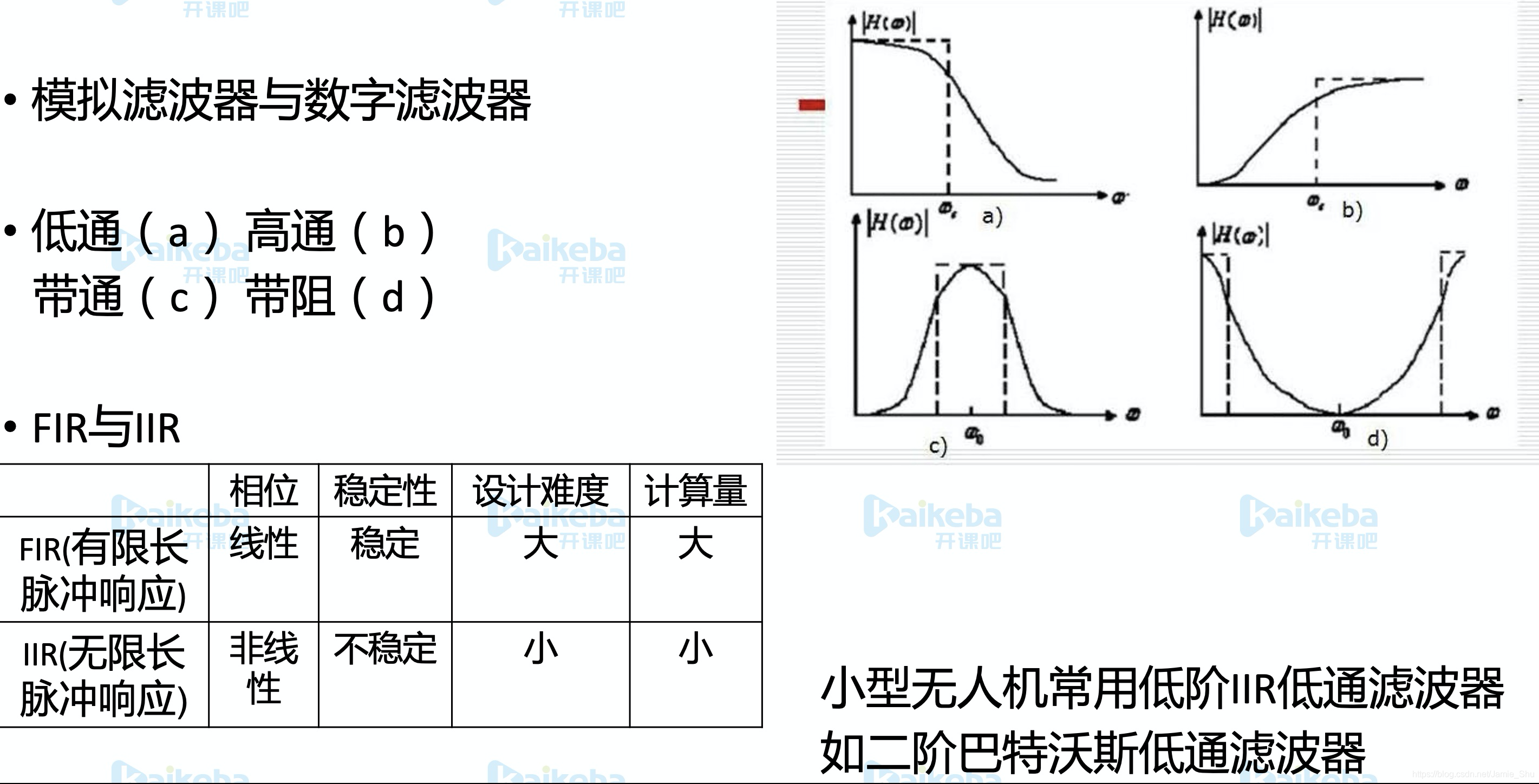
04 工程训练:如何减振 目录1 振动信号分析基础1.1 信号分析系统的组成1.2 数字信号采集1.2.1 步骤:1.2.2 数字信号采集 - 采样1.2.2 数字信号采集 - 采样定理1.2.4 数字信号采集:频率混叠1.2.5 数字信号采集:抗混叠方法1.2.6 数字信号采集:量化 1.3 信号预处理1.3.1 信号预处理:剔除异常点1.3.2 信号预处理:去除均值和趋势项1.3.3 信

04工程训练:减振设计 2020-08-08
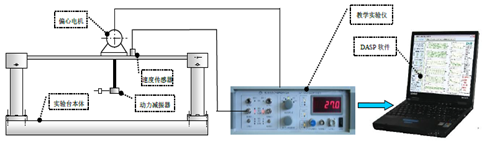
目录 一、振动信号分析基础 信号分析系统的组成 数字信号采集 数字信号采集:采样 数字信号采集:量化 信号预处理:剔除异常点 信号预处理:去除均值和趋势项 信号预处理:重采样 二、背景介绍 振动的危害 机理与减振效果 三、振动机制 四、模态分析 有限元分析 求解过程 结果分析 避免共振 五、实验测量 实验装置 传感器固连方式 实验装置——数据采集系统 飞行试验 六、测量结果分析 幅值域分析