本文主要是介绍HFSS 仿真AC耦合,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
高速信号往往会使用电容进行耦合,可以抵消直流影响。但是电容的焊盘一般比走线宽,会导致阻抗不连续,试着仿真下影响度。
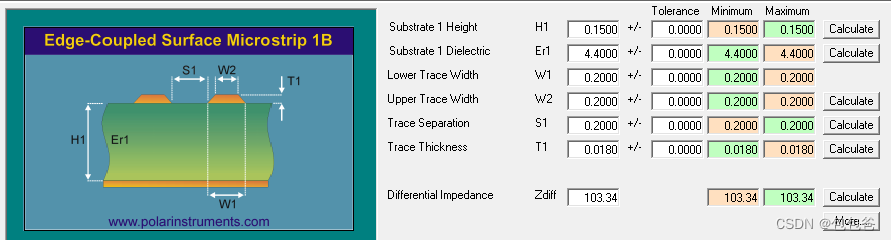
①先计算下差分线,如下
②在3D LAYOUT创建模型,先设定叠层如下

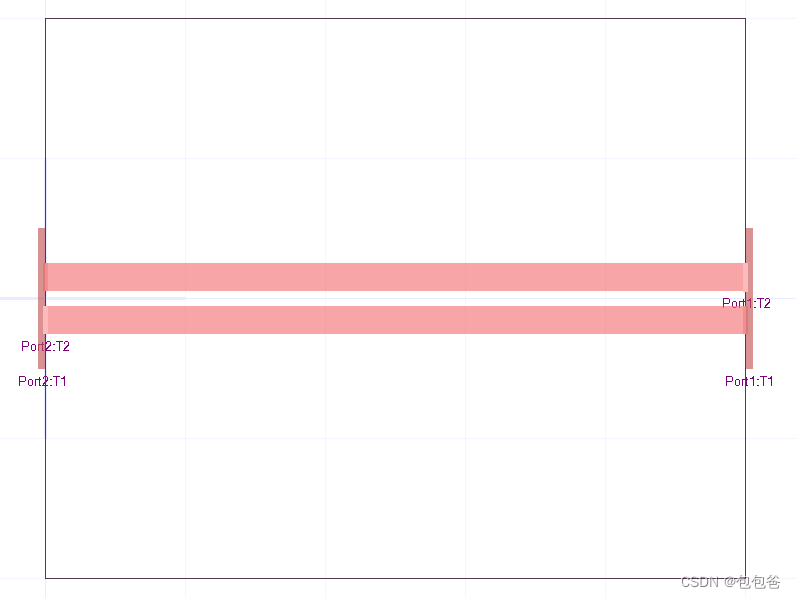
③在top层建立微带线
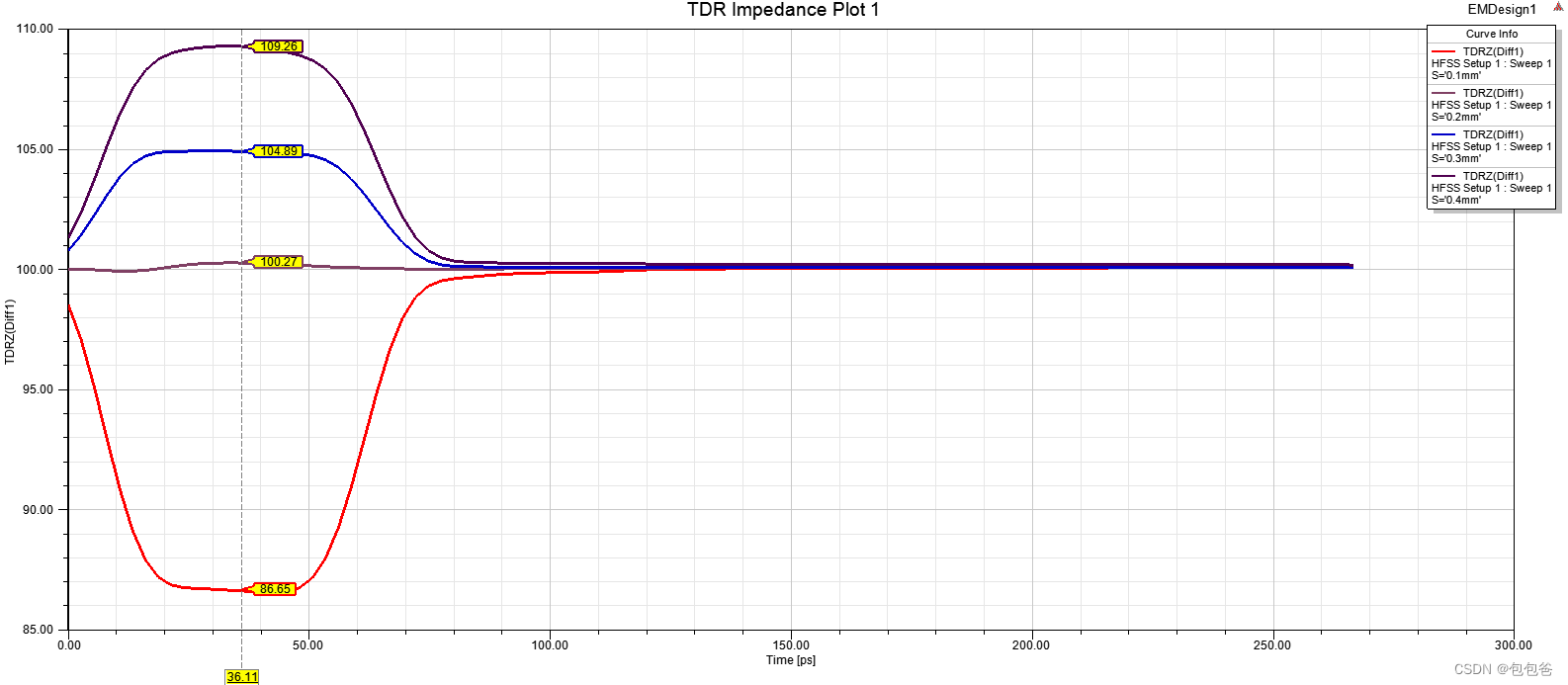
④先验证下模型的正确性,扫描下线间距,可以看到再0.2mm间距的时候,接近计算值模型正确
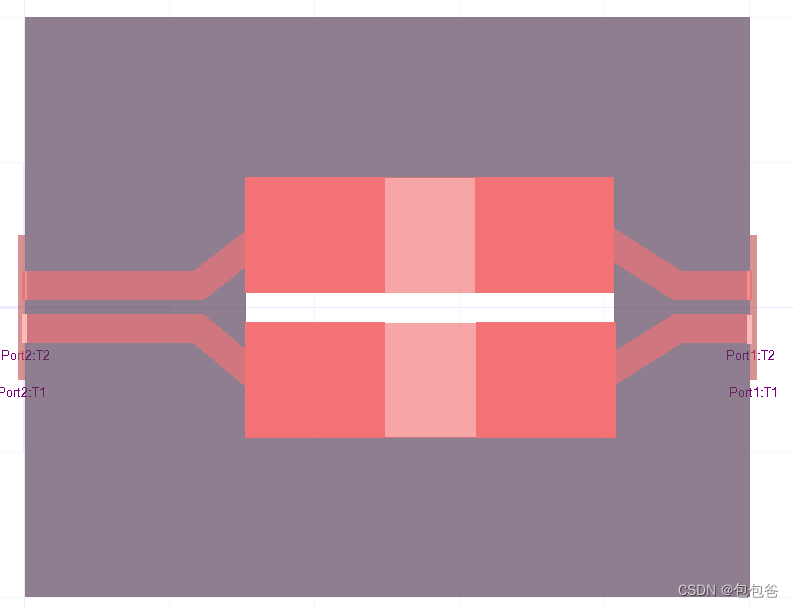
⑤建立电容焊盘 ,如下0603的焊盘

模型如下,平面没有显示出来,L2,L3为平面

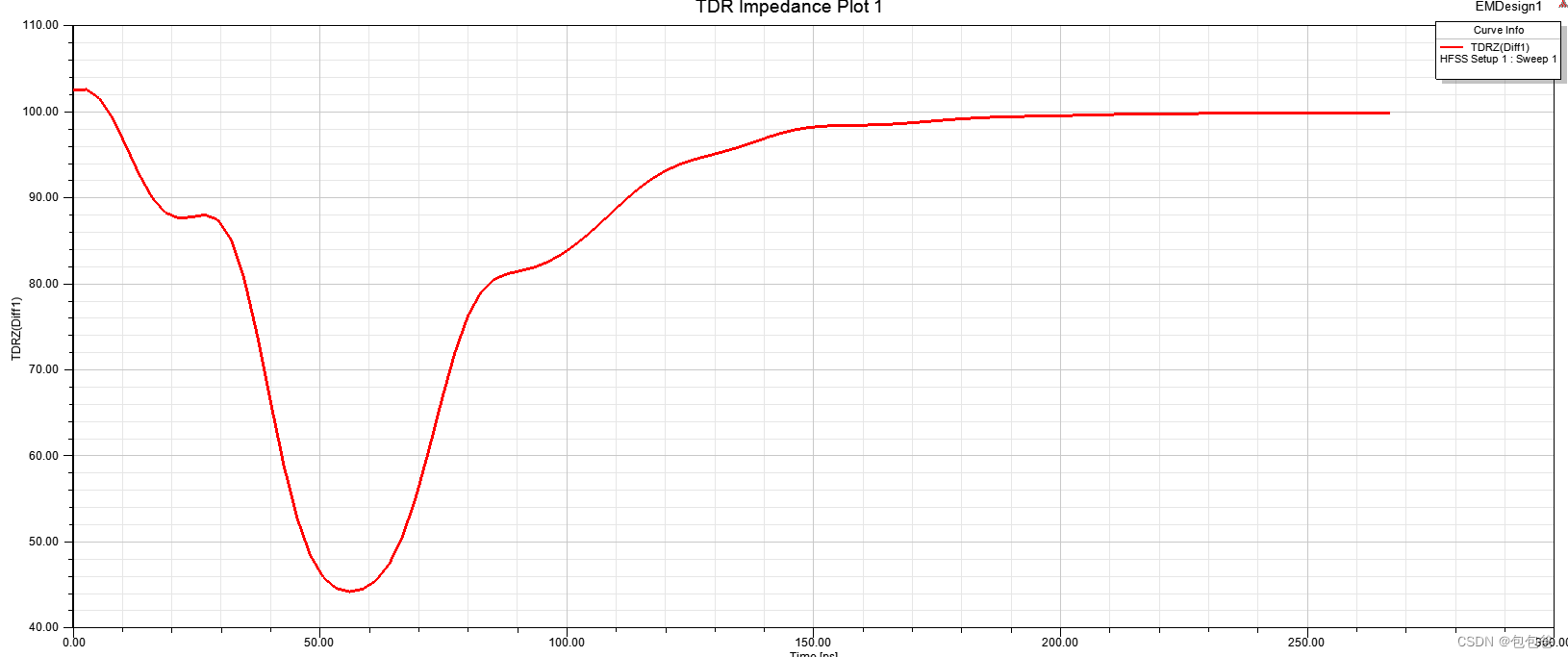
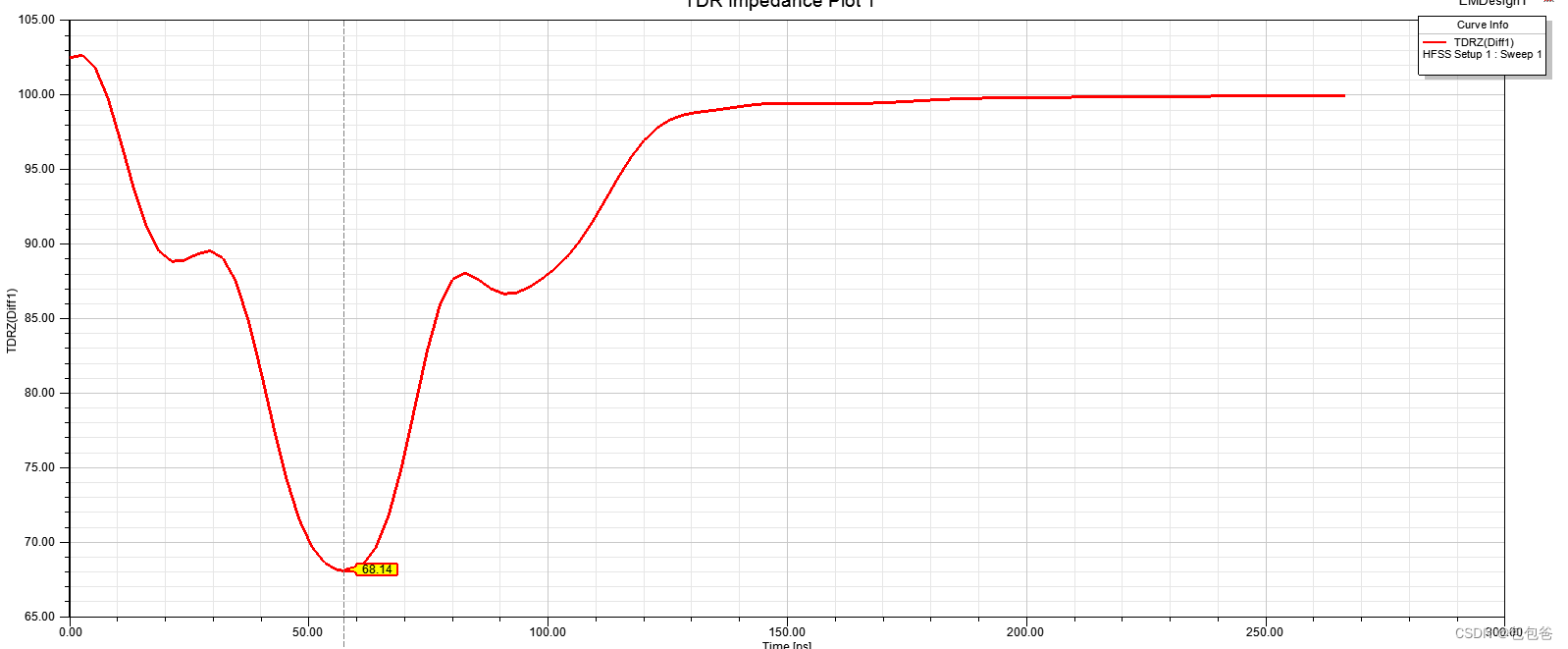
TDR如下,明显看到阻抗不连续了,大概到了40多ohm。那么就要想办在L2层进行开窗,进行改善
⑥L2开窗,开的窗和电容一般大小。进行仿真看看。
如下阻抗有改善。阻抗改善到了68ohm,如果有得到更好的结果,需要继续进行优化。
这篇关于HFSS 仿真AC耦合的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






