本文主要是介绍ubuntu18.04获取ium Xsens MTi-G-700数据,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
首先去官网下载xsens驱动包,链接如下:
知识库 – Xsens
根据自己的电脑系统,若是64位下X64,32位下X86,版本错误可能会导致后期Xsens编译时报错/usr/bin/ld: cannot find -lxscontroller -lxscommon -lxstypes

下载好后,安装Xsens驱动
18.04
sudo apt-get install ros-melodic-xsens-driver
16.04
sudo apt-get install ros-kinetic-xsens-driver
将刚刚在网站上下载好的MT软件套装放到任意文件夹中,提取压缩文件,也可以用指令提取,指令如下:
tar -xvzf MT_Software_Suite_linux-x64_2020.5.tar.gz提取完后文件夹里还有两个压缩文件magfieldmapper,mtmanager。可以用相同方法提取
之后回到MT_Softwars_Suite文件夹中,输入下列指令,即可在/usr/local/下生成xsens文件夹。
sudo ./mtsdk_linux-x64_2020.5.sh
此时可以把imu与工控/电脑链接,查看相应USB口是否存在
ls -l /dev/ttyUSB*
可以看到该USB口的权限,若输入报错,有可能是缺少串口工具,可以尝试安装
sudo apt-get install minicom
此时USB权限应该是不够的,赋予权限,我的是USB0,根据自己的USB输入权限指令。
sudo chmod 777 /dev/ttyUSB0现在可以查看一下Xsens是否安装成功。进入MT_Software_Suite_linux-x64_2020.5/mtmanager/linux-x64/bin此路径找到bin目录下的mtmanager可执行文件,可以直接双击打开,也可以在此目录下打开一个终端输入以下命令运行:
./mtmanager
会弹出一个窗口,一般会显示3D imu,但我没有显示,不过可以点击左上角
就会在界面中显示imu,此时你去晃动imu图像中的方块也会跟着晃动即可。
接着我们就可以安装xsens_ros_mti_driver了
首先创建一个工作空间,名称任意,我这边就叫catkin_make了,在主目录中打开终端
mkdir-p ~/catkin_ws/src
cd catkin_ws
catkin_make
将/usr/local/xsens/下的xsens_ros_mti_driver文件夹复制到工作空间的src目录下,可以直接复制也可以使用命令复制。
cp /usr/local/xsens/xsens_ros_mti_driver ~/catkin_ws/src/
进入自己工作空间的src下,确认当前文件和目录的权限为o+rw,如果是则不需要修改,我用的时候需要修改,修改方式如下:
chmod -R o+rw xsens_ros_mti_driver/然后从工作空间构建xspublic,pushd是目录入栈,popd是目录出栈:
pushd ~/catkin_ws/src/xsens_ros_mti_driver/lib/xspublic && make && popd完成后再次编译,进入自己的工作空间
cd ~/catkin_ws
catkin_make
编译完成后建议重启,因为执行launch可能会报错。
重启后进入工作空间配置环境,启动launch文件即可
cd ~/catkin_ws
source devel/setup.bash
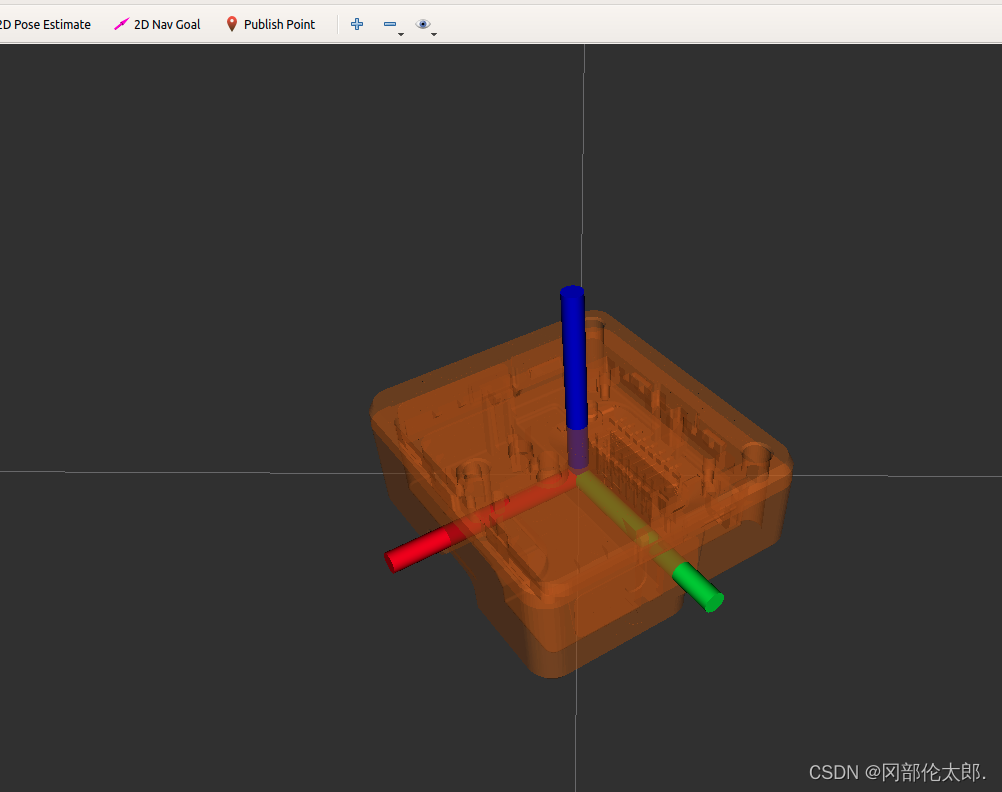
roslaunch xsens_mti_driver display.launch
# 在ROS 中观察Rviz中的模型运动
roslaunch xsens_mti_driver xsens_mti_node.launch
# 用于MTI系列产品发送消息即可在rviz中看到自己的imu
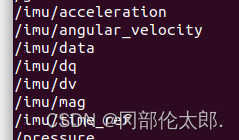
此时可以另起终端窗口,查看发布的话题是否有imu
rostopic list
打印imu数据
rostopic echo /imu/data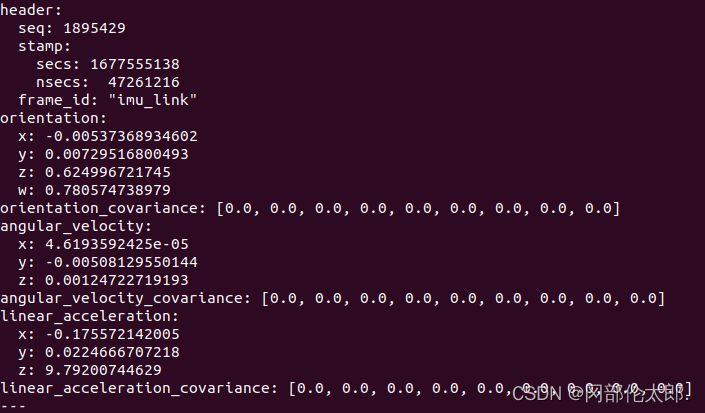
完成数据获取
这篇关于ubuntu18.04获取ium Xsens MTi-G-700数据的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!



