本文主要是介绍【目标跟踪】PTAV:Parallel Tracking and Verifying,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
Parallel Tracking and Verifying: A Framework for Real-Time and High
Accuracy Visual Tracking(ICCV2017)
这篇文章作者写他的初衷是由于之前的目标跟踪算法太慢了,他想要达到一个real-time的效果,没想到这个文章在长时间跟踪上效果很好,可以说是目前数一数二的长时间跟踪器。
1、Motivation
1、目前很多的跟踪器认为目标在视频逐帧中的运动是smooth的,而且目标的表观变化不大,这种方式固然能在一部分情况下得到精度高的效果,但这种假设会有意外,所以这篇文章提出目标跟踪需要一个验证器;
2、SLAM使用多线程的方式得到了很好的效果,所以可以把这种思想移植到目标跟踪方向;
3、目前已有的许多跟踪器为本文寻找一个结合的方式提供了基础。
2、Contribution
1、提出了跟踪和验证平行进行的网络;
2、将相关滤波的跟踪和基于深度学习的验证网络相结合;
3、跟踪效果比很多state-of-the-art的方法都好;
4、这篇文章只是简单使用fDSST和SINT相结合,这个网络还有很多其他的选择。
PTAV算法
算法网络:
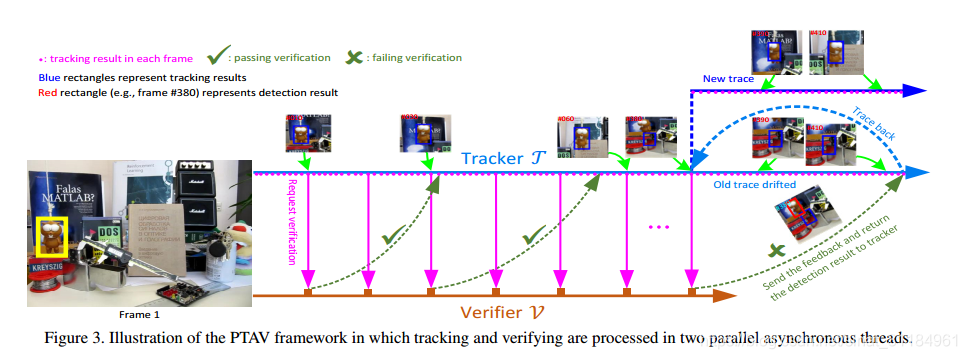
如上图,该网络有两个平行分支,上面那个是跟踪器,下面是验证器。
1、跟踪器 T T T:
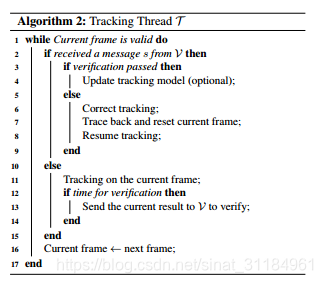
这个跟踪器负责实时跟踪。跟踪器这里使用fDSST,一种基于相关滤波的跟踪器,跟踪器每隔一个固定的间隔向验证器 V V V发送验证请求,发送验证请求后跟踪器依旧向后运行,当收到验证器反馈时有两种情况,一种是当反馈成功,跟踪器决定是否更新模型;另一种是更新失败后,跟踪器要回到失败的那一帧再开始跟踪,所以需要将所有的中间结果都保存下来;
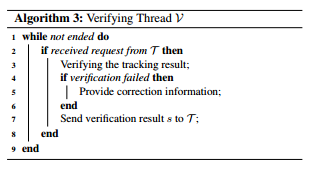
2、验证器 V V V
验证器负责高精度部分。这里值得注意的是,验证器不是对跟踪器的每一帧都验证,而是每当收到跟踪器验证请求时才验证,若正确则返回一个正反馈,若失败需要返回该验证器找到的当前帧目标,这是因为验证器使用的是SiamFC网络,精度高但执行速度很慢,所以这种异步的方式既保证了速度也保证了精度。
这里跟踪器和验证器都是先用第一帧初始化,跟踪器会更新,但验证器就不会更新模型
程序流程如下:
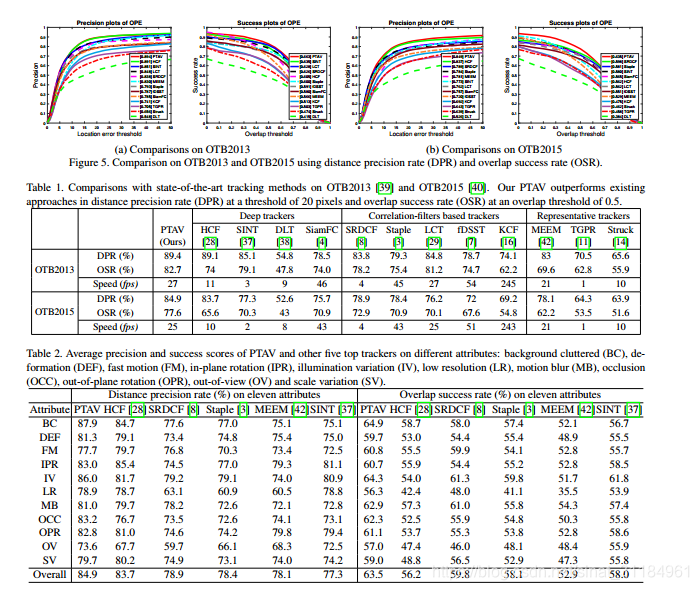
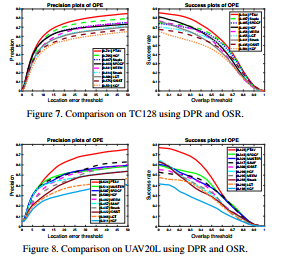
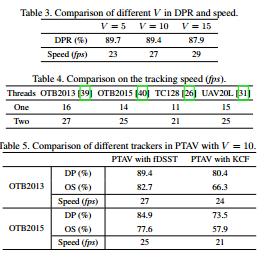
3、实验结果
4、优点:(同贡献)
5、缺点:
1、最后的结果很大程度取决于验证器的精确度,所以若验证器失败,这网络就失败了。这就跟SiameseFC有很大关系,当出现严重遮挡或者尺度变化时PTAV就会失败;
2、这个方法需要储存所有的中间结果,浪费储存空间。
这个方法虽然有创意,但是目前基于孪生网络跟踪速度已经很快了,具体可以参考18年CVPR的SiameseRPN以及18年ECCV的DaSiameseRPN
这篇关于【目标跟踪】PTAV:Parallel Tracking and Verifying的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!


![[数据集][目标检测]血细胞检测数据集VOC+YOLO格式2757张4类别](https://i-blog.csdnimg.cn/direct/22c867ab717d44c78b985ed667169b42.png)

![[数据集][目标检测]智慧农业草莓叶子病虫害检测数据集VOC+YOLO格式4040张9类别](https://i-blog.csdnimg.cn/direct/4a9ca83db964467783f221a1fd15ab5b.png)


