本文主要是介绍机器人制作开源方案 | 双轮提升搬运小车,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
1. 功能描述
双轮提升搬运小车是一种用于搬运和移动物体的机械设备,它通常采用双轮驱动和提升装置。一般具备以下特点:
① 双轮驱动:该小车配备两个驱动轮,通过电动机或其它动力源驱动,提供足够的动力和扭矩,使其能够在平坦的地面上自由行驶。
② 提升装置:小车上设有提升装置,可用于搬运物体的升降操作。通过控制提升装置的操作,可以使小车上的货物升高或降低,以适应不同高度的搬运需求。
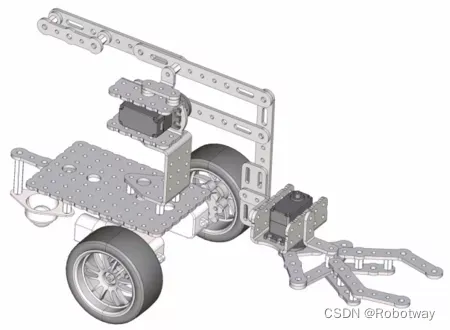
本文示例将实现R055b样机双轮提升搬运小车在行进过程中实现夹取的功能。


2. 电子硬件
在这个示例中,我们采用了以下硬件,请大家参考:
| 主控板 | Basra主控板(兼容Arduino Uno) |
| 扩展板 | Bigfish2.1扩展板 |
| 电池 | 7.4V锂电池 |
3. 功能实现
编程环境:Arduino 1.8.19
下面提供一个双轮提升搬运小车在行进过程中实现夹取功能的参考程序(sketch_sep14a.ino):
/*------------------------------------------------------------------------------------版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.Distributed under MIT license.See file LICENSE for detail or copy athttps://opensource.org/licenses/MITby 机器谱 2023-09-15 https://www.robotway.com/------------------------------*/#include <Servo.h>Servo armServo; // 机械臂舵机Servo clawServo; // 夹子舵机int armAngle = 90; // 机械臂初始角度int clawAngle = 90; // 夹子初始角度int leftMotorPin1 = 9; // 左电机引脚1int leftMotorPin2 = 10; // 左电机引脚2int rightMotorPin1 = 5; // 右电机引脚1int rightMotorPin2 = 6; // 右电机引脚2void setup() {armServo.attach(4); // 机械臂舵机连接到引脚4clawServo.attach(7); // 夹子舵机连接到引脚7pinMode(leftMotorPin1, OUTPUT);pinMode(leftMotorPin2, OUTPUT);pinMode(rightMotorPin1, OUTPUT);pinMode(rightMotorPin2, OUTPUT);}void loop() {// 小车前进forward();delay(1000);// 机械臂下落moveArm(130);delay(1000);// 夹爪闭合closeClaw();delay(1000);// 机械臂抬起moveArm(90);delay(1000);// 小车后退backward();delay(1000);// 夹爪张开openClaw();delay(1000);}// 控制机械臂运动到指定角度void moveArm(int angle) {armServo.write(angle);armAngle = angle;}// 控制夹爪闭合void closeClaw() {clawServo.write(160); // 根据实际情况调整角度clawAngle = 160;}// 控制夹爪张开void openClaw() {clawServo.write(60); // 根据实际情况调整角度clawAngle = 60;}// 小车前进void forward() {digitalWrite(leftMotorPin1, HIGH);digitalWrite(leftMotorPin2, LOW);digitalWrite(rightMotorPin1, HIGH);digitalWrite(rightMotorPin2, LOW);}// 小车后退void backward() {digitalWrite(leftMotorPin1, LOW);digitalWrite(leftMotorPin2, HIGH);digitalWrite(rightMotorPin1, LOW);digitalWrite(rightMotorPin2, HIGH);}4. 扩展样机
本样机有一些简单的扩展案例,如下图所示将驱动轮模块上的直流电机更换为舵机,或者在小车尾部安装一个牛眼万向轮:

程序源代码及样机3D文件等资料详见 双轮提升搬运小车
这篇关于机器人制作开源方案 | 双轮提升搬运小车的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







