本文主要是介绍激光打标机,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
激光打标机是一种使用激光束在各种不同的物质表面打上永久的标记的设备。它主要分为以下几种类型:
1、CO2激光打标机:这是最常见的激光打标机类型,适用于大多数非金属材料。
2、紫外激光打标机:因为主要用于超精细打标、雕刻,特别适合用于食品、医药包装材料打标、打微孔、玻璃材料的高速划分及对硅片晶圆进行复杂的图形切割等应用行业。
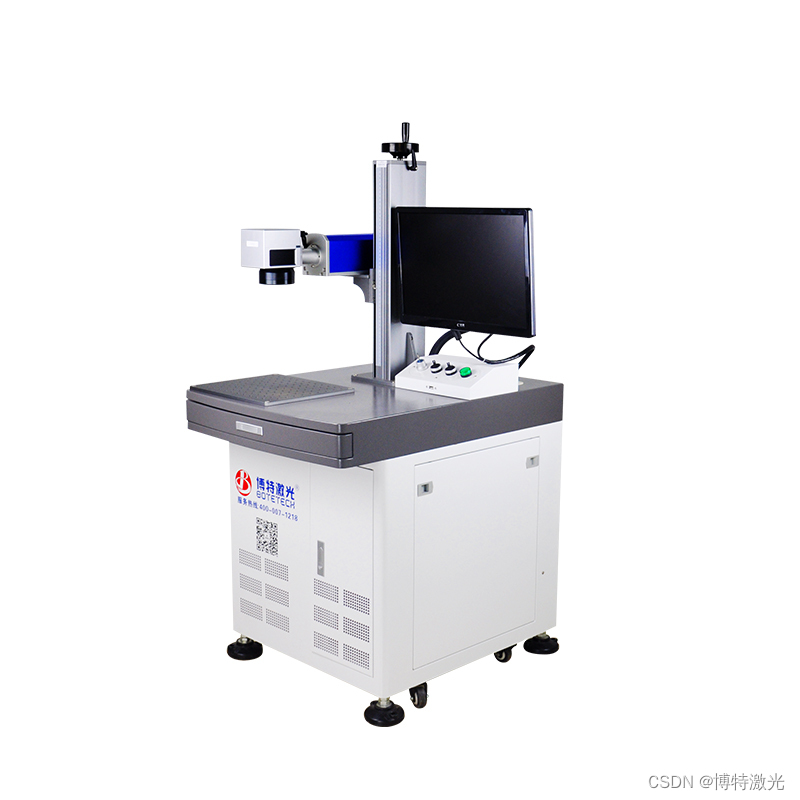
3、光纤激光打标机:这种激光打标机具有高精度、高速度和高可靠性。
激光打标机的工作原理是通过表层物质的蒸发露出深层物质,从而刻出精美的图案、商标和文字。计算机控制系统是整个激光打标机控制和指挥的中心,同时也是软件安装的载体。激光打标机应尽可能在无尘、10℃-35℃的环境中使用,并保持光学器件干燥、无尘。
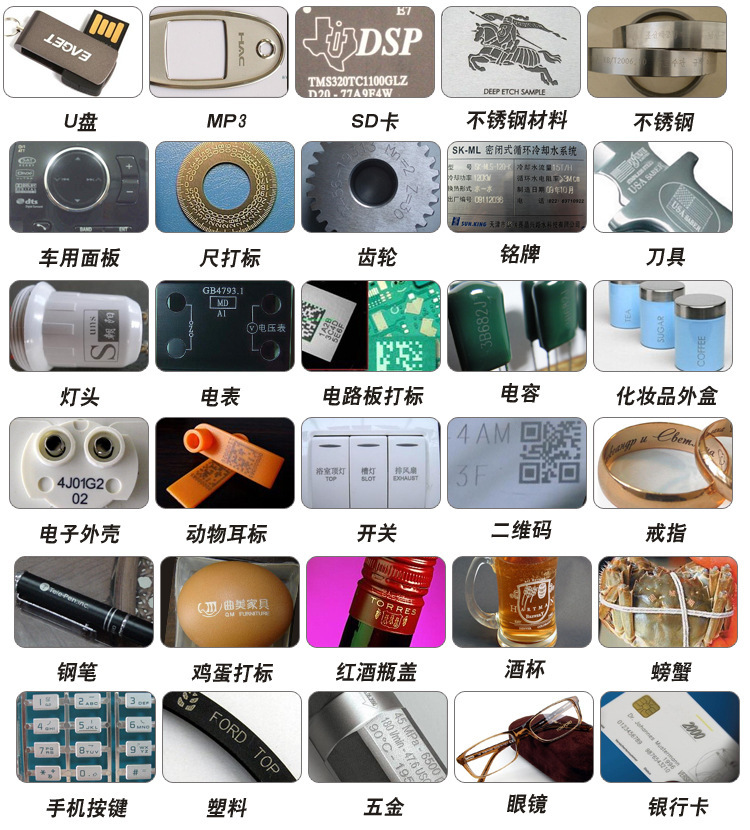
激光打标机主要应用于一些要求更精细、精度更高的场合,包括电子元器件、集成电路(IC)、电工电器、手机通讯、五金制品、工具配件、精密器械、眼镜钟表、首饰饰品、汽车配件、塑胶按键、建材、PVC管材等。
这篇关于激光打标机的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!