本文主要是介绍线扫相机DALSA--卡间同步,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
(Q有答疑)5.海康visionmaster图像处理之图像运算
卡间同步原理:
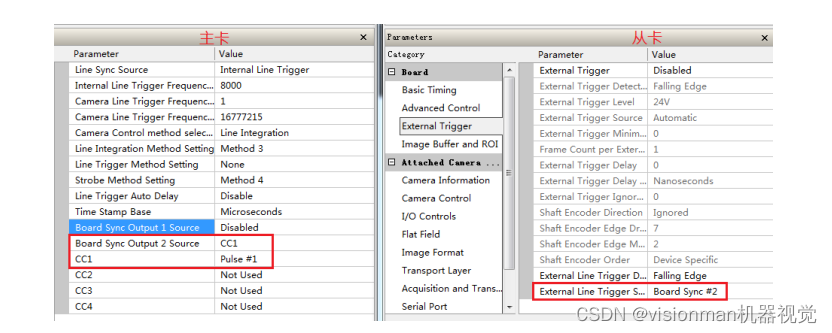
Xtium-CL-MX4采集卡通过CL1接口发送Pulse # 1脉冲信号至相机Data 1接口,控制相机拍照。现通过卡间同步排线,首先将主卡CL1的Pulse # 1脉冲信号输出至主卡的J5接口,再通过排线将脉冲信号引至从卡的J5接口;从卡选择外触发拍照模式,读取从卡J5接口输入的脉冲信号,从而实现卡间同步功能。
如上图所示,主卡CL1发送Pulse # 1脉冲信号,然后开启主卡的Board Sync Output 1/2 Source输出功能,主卡自带两个输出接口,可根据从卡的数量灵活选择启用1或2 Sync输出,此时主卡的Pulse # 1即发送至从卡上。
从卡外触发资源选择Board Sync # 1或者# 2(与主卡输出相对应),沿触发依据Method而定,即可实现卡间同步:

注意:从卡一定要选择External Line Trigger(外触发)模式,非编码器触发模式,其它参数设置与编码器触发模式一致。
Method内Pulse # 1脉冲极性请选择高电平,如果出现从卡与主卡采集帧率不匹配等情况,表明Pulse # 1脉冲极性设置错误。
注意:卡间同步情况下,从卡采集图像存在一定的滞后性,可通过调节参数来消除部分滞后性,详情需请教相关人员来解决该问题。
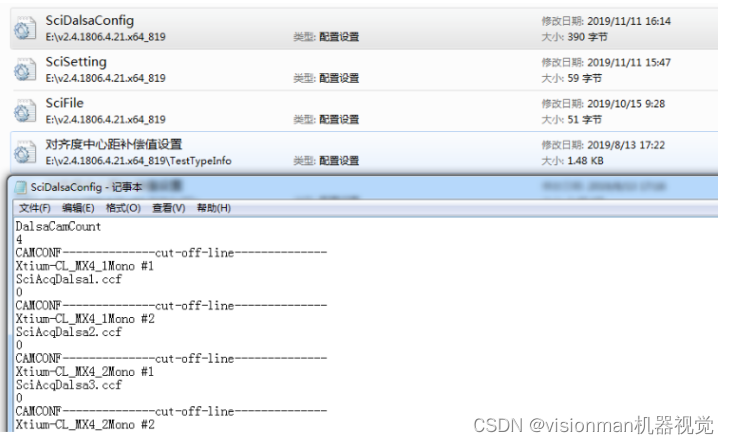
为匹配采集卡Base模式,相机Transport Layer需设置为Base模式,同理Base模式下需更新SciDalsaConfig配置,如上图所示,保证采集库可查找到对应硬件ID,否则必出现采集算子NG问题。
这篇关于线扫相机DALSA--卡间同步的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






