线扫专题

【工控】线扫相机小结
背景简介 我目前接触到的线扫相机有两种形式: 无采集卡,数据通过网线传输。 配备采集卡,使用PCIe接口。 第一种形式的数据通过网线传输,速度较慢,因此扫描和生成图像的速度都较慢,参数设置主要集中在相机本身。第二种形式的相机配备采集卡,通常速度更快,但由于相机和采集卡都需要配置,操作相对复杂。 在采集卡中,我遇到过两种连接方式:光口和Camera Link。这两种方式的速度更快,但由于需要
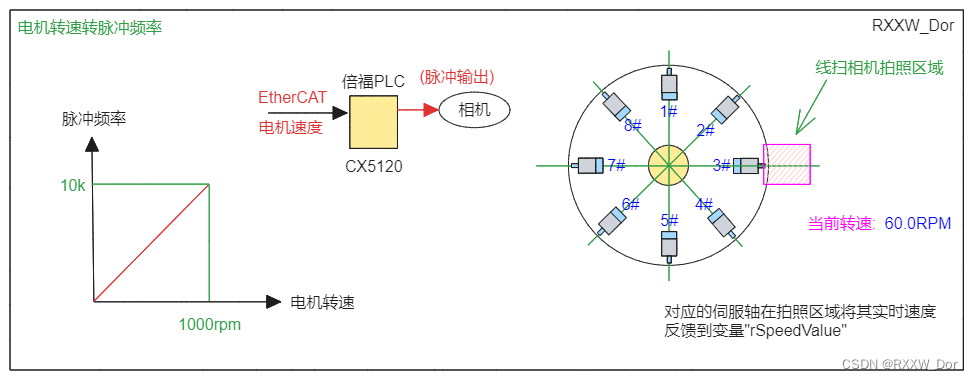
视觉应用线扫相机速度反馈(伺服转盘)
运动控制实时总线相关内容请参考运动控制专栏,这里不再赘述 1、运动控制常用单位u/s运动控制单位[u/s]介绍_运动控制 unit是什么单位-CSDN博客文章浏览阅读176次。运动控制很多手册上会写这样的单位,这里的u是英文单词unit的缩写,也就是单位的意思,所以这里的单位不是微米/秒,也不是毫米/秒,这里是一个泛指,当我们的单位选择脉冲时,它就是脉冲/秒,也就是我们说的频率(HZ)。常用脉冲

线扫相机品牌汇总(国外+国内)
线扫相机品牌汇总(国外+国内) 行者 热爱生活 22 人赞同了该文章 线扫相机也叫做线阵相机,和面阵相机一样,都是重要的工业相机。 线扫相机正如其名字那样,拍照时像扫描一样,相机和被拍照物体有相对匀速运动。 Perhaps the most common example of line scan imaging is the fax machine. Line

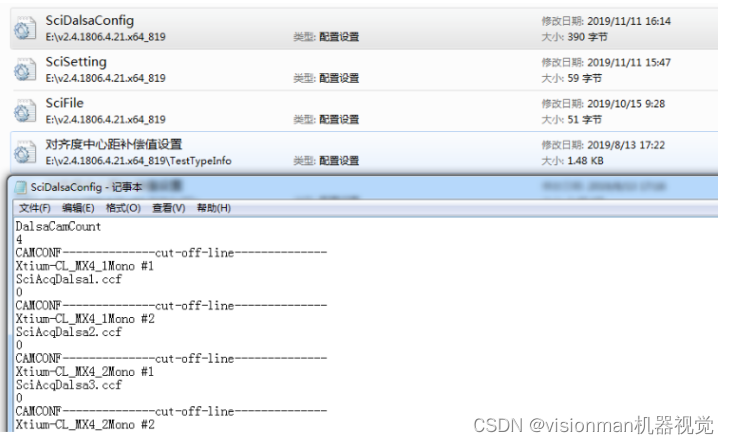
Dalsa线扫相机配置-一台工控机同时连接多个GigE相机
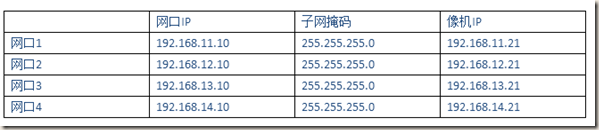
如图,我强悍的工控机,有六个网口。 实际用的时候连了多台相机,为了偷懒我就把六个网口的地址分别设为192.168.0.1~192.168.0.6,以为相机的IP只要设在192.168.0这个网段然后随便插就好了。 结果设置完后所有的相机都无法识别。 询问了厂家得到以下专业回复: 我们建议(之前也看到BASLER有类似的说明): 相对应的网口/像机放在同一个网段, 不同的网口/像机放在不同的网
线扫相机DALSA-相机平场矫正详细步骤
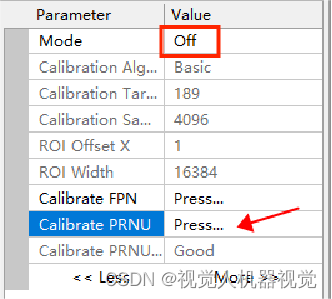
在相机视野下铺放白色亚克力板或纯白纸,采集图像。打开曲线图。 选择 Line Profile 模式。调节好相应所需的曝光时间、光源、增益和镜头光圈,让白平衡纸显示出来的灰度值大概在 150-200 左右。 在Calibration Algorithm 中将显示的数值设置好。 先暗场、再亮场。 Flat Field 里的 Mode,更改为 On。准备好白色亚克力板(优先),没有可以用白纸代替,
线扫相机DALSA--常见问题一:软件安装顺序
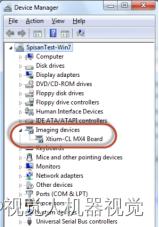
1.软件安装顺序 先安装:Sapera_LT_SDK,后安装Xtium-CL MX4驱动。 2.初次安装CamExpert,重启电脑后未找到相机 Settings(搜索协议)配置完毕后,需点击Detect Camera(一键查找相机)按钮,搜索相机。第一次查找相机耗时会略长,后续打开CamExpert无需再Detect Camera,相机专家会按照搜索协议,自动连接相机。 3.未找到采集卡

线扫激光点云拼接——运动机构法
假设线扫激光已经可以得到单帧点云。 滑台 运动方向标定: 其中(xstart,ystart,zstart)是标定板初始位姿在相机坐标系下的坐标,(xend,ystart,zstart)是标定板最终位姿在相机坐标系下的坐标。再将(△x,△y,△z)单位化即可得到滑台的运动方向。 在相机坐标系下拼接的坐标变换矩阵为 其中l为滑台运动的位移。 转台 旋转轴线标定:方法有多种,这里给出其中一种
线扫相机DALSA-拍照方式说明
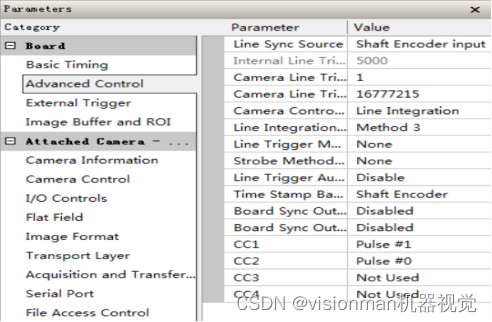
(Q有答疑)海康机器视觉visionmaster-字符识别 Dalsa相机支持行触发拍照,帧触发拍照、行帧触发拍照等多种拍照方式,现对项目中所用的拍照方式做分类说明。 采集卡IO对照表: 如上图所示,采集卡IO/STS接口共27个针脚,其中2,3,5,6号针脚对应接编码器A-,A+,B-,B+信号,为行触发接入引脚;7,8,9,20号为帧触发接入引脚;11,12号为采集卡帧信号
线扫相机DALSA--卡间同步
(Q有答疑)5.海康visionmaster图像处理之图像运算 卡间同步原理: Xtium-CL-MX4采集卡通过CL1接口发送Pulse # 1脉冲信号至相机Data 1接口,控制相机拍照。现通过卡间同步排线,首先将主卡CL1的Pulse # 1脉冲信号输出至主卡的J5接口,再通过排线将脉冲信号引至从卡的J5接口;从卡选择外触发拍照模式,读取从卡J5接口输入的脉冲信号,从而实