本文主要是介绍Laplacian on Triangle Mesh,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
Laplacian on Triangle Mesh
局部平均区域
基本思想是mesh面上的点x的值设置为其局部领域的平均。下图是几种具体的情况:

其中蓝色区域为局部平均区域。
- Barycentric cell:三角形的重心和三角形边的中点相连
- Voronoi cell:三角形的外心和三角形的中点相连(对于钝角三角形可能会出现外心在外部)
- Mixed Voronoi cell:在Voronoi cell的基础上,将钝角三角形的外心替换成钝角对边的中点
梯度
拉普拉斯算子是梯度的散度,所以我们需要先求出梯度。
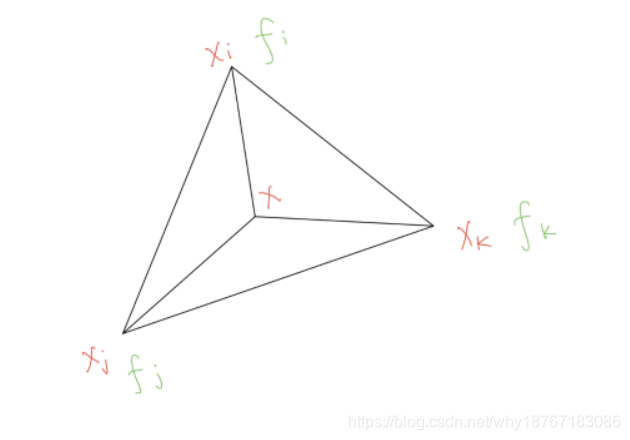
属性插值函数:
f ( x ) = α f i + β f j + γ f k f(x)=\alpha f_i+\beta f_j+\gamma f_k \\ f(x)=αfi+βfj+γfk
其中: f i , f j , f k f_i,f_j,f_k fi,fj,fk是三角形三个顶点的属性值,x为三角形内部的点, α , β , γ \alpha , \beta , \gamma α,β,γ 是点x在三角形的重心坐标, α + β + γ = 1 \alpha + \beta + \gamma = 1 α+β+γ=1。
梯度:
∇ x f ( x ) = f i ∇ x α + f j ∇ x β + f k ∇ x γ \nabla_xf(x)=f_i\nabla_x\alpha +f_j\nabla_x\beta +f_k\nabla_x\gamma ∇xf(x)=fi∇xα+fj∇xβ+fk∇xγ
对于 α \alpha α来说:
α = A i A T = ( ( x − x j ) ⋅ ( x k − x j ) ⊥ ∣ ∣ x k − x j ∣ ∣ 2 ) ∣ ∣ x k − x j ∣ ∣ 2 2 A T = ( x − x j ) ⋅ ( x k − x j ) ⊥ 2 A T \alpha = \frac{A_i}{A_T}=\frac{((x-x_j)\cdot\frac{(x_k-x_j)^\bot}{||x_k-x_j||_2})||x_k-x_j||_2}{2A_T}=\frac{(x-x_j)\cdot(x_k-x_j)^\bot}{2A_T} α=ATAi=2AT((x−xj)⋅∣∣xk−xj∣∣2(xk−xj)⊥)∣∣xk−xj∣∣2=2AT(x−xj)⋅(xk−xj)⊥
对 x x x求导:
∇ x α = ( x k − x j ) ⊥ 2 A T ∇ x β = ( x i − x k ) ⊥ 2 A T ∇ x γ = ( x j − x i ) ⊥ 2 A T \nabla_x\alpha=\frac{(x_k-x_j)^\bot}{2A_T} \\ \nabla_x\beta=\frac{(x_i-x_k)^\bot}{2A_T} \\ \nabla_x\gamma=\frac{(x_j-x_i)^\bot}{2A_T} ∇xα=2AT(xk−xj)⊥∇xβ=2AT(xi−xk)⊥∇xγ=2AT(xj−xi)⊥
得到梯度公式:
∇ x f ( x ) = f i ( x k − x j ) ⊥ 2 A T + f j ( x i − x k ) ⊥ 2 A T + f k ( x j − x i ) ⊥ 2 A T \nabla_xf(x)=f_i\frac{(x_k-x_j)^\bot}{2A_T} +f_j\frac{(x_i-x_k)^\bot}{2A_T}+f_k\frac{(x_j-x_i)^\bot}{2A_T} ∇xf(x)=fi2AT(xk−xj)⊥+fj2AT(xi−xk)⊥+fk2AT(xj−xi)⊥
因为
( x k − x j ) ⊥ + ( x i − x k ) ⊥ + ( x j − x i ) ⊥ = 0 (x_k-x_j)^\bot+(x_i-x_k)^\bot+(x_j-x_i)^\bot=0 (xk−xj)⊥+(xi−xk)⊥+(xj−xi)⊥=0
所以
∇ x f ( x ) = ( f j − f i ) ( x i − x k ) ⊥ 2 A T + ( f k − f i ) ( x j − x i ) ⊥ 2 A T \nabla_xf(x)=(f_j-f_i)\frac{(x_i-x_k)^\bot}{2A_T}+(f_k-f_i)\frac{(x_j-x_i)^\bot}{2A_T} ∇xf(x)=(fj−fi)2AT(xi−xk)⊥+(fk−fi)2AT(xj−xi)⊥
离散拉普拉斯算子
均匀拉普拉斯
Δ f ( v i ) = 1 ∣ N 1 ( v i ) ∣ ∑ v j ∈ N 1 ( v i ) ( f j − f i ) \Delta f(v_i) =\frac {1}{|N_1(v_i)|}\sum_{v_j \in N_1(v_i)}(f_j-f_i) Δf(vi)=∣N1(vi)∣1vj∈N1(vi)∑(fj−fi)
此公式可以用于各向同性的remesh上。
余切形式的拉普拉斯
使用混合的有限元/有限体方法(mixed finite element/finite volume method),拉普拉斯算子可以更加精确地进行离散推导。目标是在局部平均区域A_i=A(v_i)上,对逐片线性函数梯度地散度进行积分。

∫ A i Δ f d A = ∫ A i d i v ∇ f d A = ∫ ∂ A i ( ∇ f ) ⋅ n d s \int_{A_i}\Delta fdA=\int_{A_i}div\nabla fdA=\int_{\partial{A_i}}(\nabla f)\cdot n ds ∫AiΔfdA=∫Aidiv∇fdA=∫∂Ai(∇f)⋅nds
将积分分解到每个三角形上,并且局部的Voronoi区域通过三角形两条边的中点 a a a和 b b b,并且每个三角形中 ∇ f ( x ) \nabla f(x) ∇f(x)是常数,那么在该三角形 T T T上的积分为
∫ ∂ A i ∩ T ∇ f ⋅ n d s = ∇ f ⋅ ( a − b ) ⊥ = 1 2 ∇ f ( u ) ⋅ ( x j − x k ) ⊥ \int_{\partial{A_i\cap T}}∇f⋅nds = ∇f⋅(a−b) ^⊥= \frac{1}{2}∇f(u)⋅(x_j-x_k)^\bot ∫∂Ai∩T∇f⋅nds=∇f⋅(a−b)⊥=21∇f(u)⋅(xj−xk)⊥
将梯度公式代入:
∫ ∂ A i ∩ T ∇ f ⋅ n d s = ( f j − f i ) ( x i − x k ) ⊥ ⋅ ( x j − x k ) ⊥ 2 A T + ( f k − f i ) ( x j − x i ) ⊥ ⋅ ( x j − x k ) ⊥ 2 A T \int_{\partial{A_i\cap T}}∇f⋅nds =(f_j-f_i)\frac{(x_i-x_k)^\bot \cdot (x_j-x_k)^\bot}{2A_T}+(f_k-f_i)\frac{(x_j-x_i)^\bot \cdot (x_j-x_k)^\bot}{2A_T} ∫∂Ai∩T∇f⋅nds=(fj−fi)2AT(xi−xk)⊥⋅(xj−xk)⊥+(fk−fi)2AT(xj−xi)⊥⋅(xj−xk)⊥
因为
A T = 1 2 s i n γ j ∣ ∣ x j − x i ∣ ∣ ∣ ∣ x j − x k ∣ ∣ = 1 2 s i n γ k ∣ ∣ x i − x k ∣ ∣ ∣ ∣ x j − x k ∣ ∣ A_T=\frac{1}{2}sin\gamma_j||x_j-x_i|| ||x_j-x_k||=\frac{1}{2}sin\gamma_k||x_i-x_k|| ||x_j-x_k|| AT=21sinγj∣∣xj−xi∣∣∣∣xj−xk∣∣=21sinγk∣∣xi−xk∣∣∣∣xj−xk∣∣
c o s γ j = ( x j − x k ) ⋅ ( x j − x k ) ∣ ∣ x j − x i ∣ ∣ ∣ ∣ x j − x k ∣ ∣ c o s γ k = ( x i − x k ) ⋅ ( x j − x k ) ∣ ∣ x i − x k ∣ ∣ ∣ ∣ x j − x k ∣ ∣ cos\gamma_j=\frac{(x_j-x_k)\cdot (x_j-x_k)}{||x_j-x_i||||x_j-x_k||} \\ cos\gamma_k=\frac{(x_i-x_k)\cdot (x_j-x_k)}{||x_i-x_k||||x_j-x_k||} cosγj=∣∣xj−xi∣∣∣∣xj−xk∣∣(xj−xk)⋅(xj−xk)cosγk=∣∣xi−xk∣∣∣∣xj−xk∣∣(xi−xk)⋅(xj−xk)
于是得到:
∫ ∂ A i ∩ T ∇ f ⋅ n d s = 1 2 ( c o t γ k ( f j − f i ) + c o t γ j ( f k − f i ) ) \int_{\partial{A_i\cap T}}∇f⋅nds = \frac{1}{2}(cot\gamma_k(f_j-f_i)+cot\gamma_j(f_k-f_i)) ∫∂Ai∩T∇f⋅nds=21(cotγk(fj−fi)+cotγj(fk−fi))
在整个局部平均区域 A i A_i Ai上积分得到:
∫ ∂ A i ∩ T ∇ f ⋅ n d s = 1 2 ∑ j ∈ Ω ( i ) ( c o t α i j + c o t β i j ) ( f j − f i ) \int_{\partial{A_i\cap T}}∇f⋅nds = \frac{1}{2} \sum_{j \in \Omega(i)}(cot\alpha_{ij}+cot\beta_{ij})(f_j-f_i) ∫∂Ai∩T∇f⋅nds=21j∈Ω(i)∑(cotαij+cotβij)(fj−fi)
所以在顶点 v i v_i vi处,函数 f f f的拉普拉斯算子的离散平均为:
Δ f ( v i ) = 1 2 A i ∑ j ∈ Ω ( i ) ( c o t α i j + c o t β i j ) ( f j − f i ) \Delta f(v_i)=\frac{1}{2A_i} \sum_{j \in \Omega(i)}(cot\alpha_{ij}+cot\beta_{ij})(f_j-f_i) Δf(vi)=2Ai1j∈Ω(i)∑(cotαij+cotβij)(fj−fi)
矩阵化求解拉普拉斯
Δ f ( v i ) = w i ∑ v j ∈ N 1 ( v i ) w i j ( f ( v j ) − f ( v i ) ) \Delta f(v_i) = w_i \sum_{v_j \in \mathcal{N}_1(v_i)} w_{ij} (f(v_j) - f(v_i)) Δf(vi)=wivj∈N1(vi)∑wij(f(vj)−f(vi))
其中 w i = 1 2 A i , w i j = c o t α i j + c o t β i j w_i=\frac{1}{2A_i},w_{ij}=cot\alpha_{ij}+cot\beta_{ij} wi=2Ai1,wij=cotαij+cotβij。将线性和写成矩阵形式:
( Δ f ( v 1 ) ⋮ Δ f ( v n ) ) = D M ⏟ L ( f ( v 1 ) ⋮ f ( v n ) ) \begin{pmatrix} \Delta f(v_1) \\ \vdots \\ \Delta f(v_n) \end{pmatrix}=\underbrace{DM}_L \begin{pmatrix} f(v_1) \\ \vdots \\ f(v_n) \end{pmatrix} ⎝⎜⎛Δf(v1)⋮Δf(vn)⎠⎟⎞=L DM⎝⎜⎛f(v1)⋮f(vn)⎠⎟⎞
其中 D = d i a g ( w 1 , . . . , w n ) D=diag(w_1,...,w_n) D=diag(w1,...,wn),M是对称矩阵:
m i , j = { − ∑ v k ∈ N 1 ( v i ) w i k , i = j w i j , v j ∈ N i ( v i ) 0 , otherwise m_{i,j} = \begin{cases} -\sum_{v_k \in \mathcal{N}_1(v_i)} w_{ik}, &i = j \\ w_{ij}, &v_j \in \mathcal{N}_i(v_i) \\ 0, & \text{otherwise} \end{cases} mi,j=⎩⎪⎨⎪⎧−∑vk∈N1(vi)wik,wij,0,i=jvj∈Ni(vi)otherwise
更高阶的拉普拉斯可以递归得到:
Δ k f ( v i ) = w i ∑ v j ∈ N 1 ( v i ) w i j ( Δ k − 1 f ( v j ) − Δ k − 1 f ( v i ) ) \Delta^k f(v_i) = w_i \sum_{v_j \in \mathcal{N}_1(v_i)} w_{ij} ( \Delta^{k-1} f(v_j) - \Delta^{k-1} f(v_i)) Δkf(vi)=wivj∈N1(vi)∑wij(Δk−1f(vj)−Δk−1f(vi))
那么这个矩阵表示就很简单的对应拉普拉斯矩阵 L L L的 k k k次幂 L k = ( D M ) k L^k=(DM)^k Lk=(DM)k。
因此在n个顶点的mesh上更高阶的偏微分方程 Δ k f = b Δ^kf=b Δkf=b离散化之后会得到一个 ( n × n ) (n×n) (n×n)的线性系统:
L k x = b L^kx=b Lkx=b
其中 x = ( f ( v 1 ) , . . . , f ( v n ) ) T x=(f(v_1),...,f(v_n))^T x=(f(v1),...,f(vn))T,且 b = ( ( b ( v 1 ) , . . . , b ( v n ) ) ) T b=((b(v_1),...,b(v_n)))^T b=((b(v1),...,b(vn)))T
矩阵性质
稀疏性 简单说一下吧。拉普拉斯矩阵中只有对角元和边对应的元素是非0的,其余全是0。根据欧拉公式,平均每一行大约7个非0元素。
对称性 由于对角矩阵 D D D捣乱,所以矩阵 L = D M L=DM L=DM不是对称的。不过对于任意k阶的拉普拉斯系统很容易转换为对称系统,即
M ( D M ) k − 1 x = D − 1 b M(DM)^{k-1}x=D^{-1}b M(DM)k−1x=D−1b
正定性 一般来讲,解偏微分方程都需要边界条件。即对于一个线性系统 A x = b Ax=b Ax=b,有部分变量 x i x_i xi保持不变,此时它们不再是未知量了。此时将对应的列 a i a_i ai移到右手边,即 b ← b − x i a i b←b−x_ia_i b←b−xiai,同时对应的行从整个系统中移除。注意到此时整个系统还是保持对称的!!!在移除边界条件之后,可以证明矩阵 L L L是负定的!负定很简单,直接在每个 L L L上乘一个-1就行,因此我们最后得到
( − 1 ) k M ( D M ) k − 1 x = ( − 1 ) k D − 1 b (-1)^kM(DM)^{k-1}x=(-1)^kD^{-1}b (−1)kM(DM)k−1x=(−1)kD−1b
由此我们就得到了一个稀疏、对称且正定的线性系统。
Reference
[1]http://staff.ustc.edu.cn/~fuxm/course/2019_Spring_DGP/index.html
[2]https://optsolution.github.io/archives/19907.html
这篇关于Laplacian on Triangle Mesh的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







