本文主要是介绍仿真迭代 | 吊舱仿真支持速度控制啦,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
在之前的prometheus gazebo仿真中虽然已经包含有吊舱(下⽂⼀律称为gimbal)的仿真功能,但却只能进⾏角度控制,⽆法进⾏速度控制,与真实的gimbal差距较⼤。
此处带来的就是增加了速度控制的gimbal仿真,给定角度和速度,gimbal就会以给定的速度到达指定的角度。
视频: [https://mp.weixin.qq.com/s?__biz=MzIwNzgxNzg0Mg==&mid=2247515855&idx=1&sn=23b28a1deccee6eb9a9d81980a9bb2f6&chksm=970e63d2a079eac437f0e1e60e935343bf8d599c20663c2279162d09d64f7f297dc8ce19ad3a&token=2044741551&lang=zh_CN#rd]
安装和使用: 要添加gimbal仿真的速度控制功能可能相对复杂,需要对多个功能包进⾏更新,涉及Prometheus,Mavros,prometheus_px4。
1、更新Prometheus代码
主要添加Modules/mission/gimbal_control/gimbal_control_vel.cpp代码 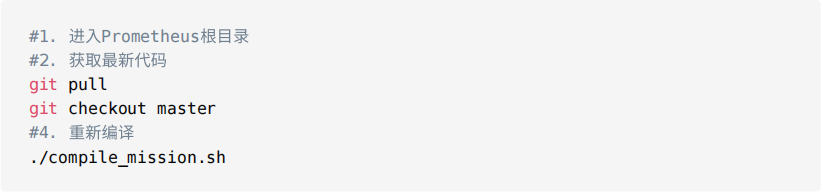
2、克隆prometheus_mavros仓库
主要添加mavros_extras/src/plugins/gimbal_control.cpp代码 
3、更新prometheus_px4代码 

4、运行 
(1)输入3轴想要到达的角度 
(2)输入3轴的速度(值为正,且值只表示速度大小而不代表实际速度) 
在添加gimbal仿真的过程中涉及了多⽅⾯的知识,包括Mavlink协议,Mavros插件开发,Mavros的数据路由,PX4数据路由,gazebo模型插件开发等知识,后期也会以gimbal仿真为案例分享以上相关知识,如果感兴趣的朋友可以持续关注!
- End -
技术发展的日新月异,阿木实验室将紧跟技术的脚步,不断把机器人行业最新的技术和硬件推荐给大家。看到经过我们培训的学员在技术上突飞猛进,是我们培训最大的价值。如果你在机器人行业,就请关注我们的公众号,我们将持续发布机器人行业最有价值的信息和技术。 阿木实验室致力于为机器人研发提供开源软硬件工具和课程服务,让研发更高效!
这篇关于仿真迭代 | 吊舱仿真支持速度控制啦的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




