本文主要是介绍ArmSoM-W3开发板 (RK3588) 之 USB摄像头图像预览,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
硬件准备
RK3588开发板(armsom-w3)、USB摄像头(罗技高清网络摄像机 C93)、1000M光纤 、 串口调试工具

v4l2采集画面
v4l2-ctl是一个用于Linux系统的命令行实用程序,用于控制视频4 Linux 2(V4L2)设备。V4L2是Linux内核中的视频设备驱动框架,用于支持各种摄像头、摄像头和视频采集设备。
将USB摄像头插入开发板后,会有如下打印:
[14720.842825] usb 7-1: new low-speed USB device number 2 using xhci-hcd
[14720.986597] usb 7-1: New USB device found, idVendor=413c, idProduct=301a, bcdDevice= 1.00
[14720.986638] usb 7-1: New USB device strings: Mfr=1, Product=2, SerialNumber=0
[14720.986653] usb 7-1: Product: Dell MS116 USB Optical Mouse
[14720.986667] usb 7-1: Manufacturer: PixArt
[14721.008123] input: PixArt Dell MS116 USB Optical Mouse as /devices/platform/usbdrd3_1/fc400000.usb/xhci-hcd.5.auto/usb7/7-1/7-1:1.0/0003:413C:301A.0001/input/input5
使用v4l2-ctl --list-devices来获取usb摄像头的节点:
root@linaro-alip:~# v4l2-ctl --list-devices
rk_hdmirx (fdee0000.hdmirx-controller):/dev/video20rkisp-statistics (platform: rkisp):/dev/video18/dev/video19rkcif-mipi-lvds2 (platform:rkcif):/dev/media0rkisp_mainpath (platform:rkisp0-vir0):/dev/video11/dev/video12/dev/video13/dev/video14/dev/video15/dev/video16/dev/video17/dev/media1罗技高清网络摄像机 C93 (usb-fc880000.usb-1):/dev/video21/dev/video22/dev/media2
运行 v4l2-ctl -d /dev/video21 --list-formats-ext 命令可以查看你的摄像头支持的格式:
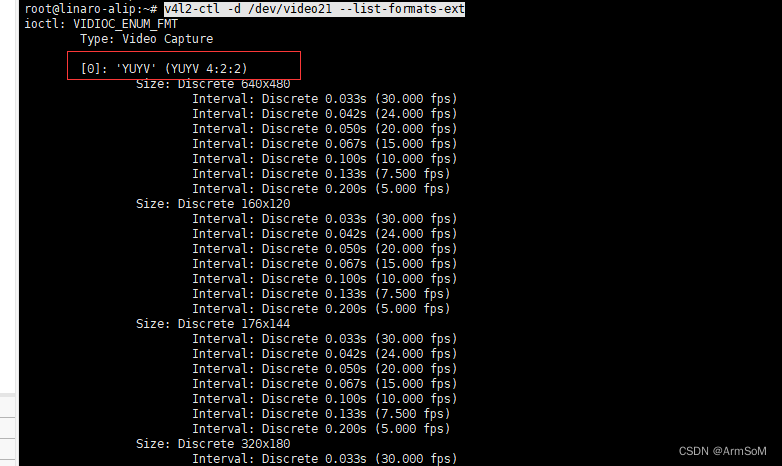
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-dNLjyCGx-1690975182908)(C:\Users\Administrator\AppData\Roaming\Typora\typora-user-images\image-20230802164835405.png)]](https://img-blog.csdnimg.cn/edaa5dab3e9a451183572fb8c4f25553.png)
从这个命令可以看到这款摄像头支持两种格式“YUYV” “MJPG”.
摄像头YUYV格式画面采集
介绍一些常用的v4l2-ctl命令选项和功能
v4l2-ctl -d /dev/video21 -D // 确认video节点v4l2-ctl -d /dev/video21 --get-fmt-video // 确认分辨率和图像格式v4l2-ctl -d /dev/video21 --get-dv-timings //获取当前timingsv4l2-ctl -d /dev/video21 --query-dv-timings // 实时查询timings
查看当前参数:使用v4l2-ctl -d /dev/video21 -l命令,将显示当前连接到/dev/video21设备的所有控制参数和其当前值。
设置视频格式和帧率:通过指定视频格式和帧率来配置摄像头,例如:
v4l2-ctl -d /dev/video0 --set-fmt-video=width=1280,height=720,pixelformat=YUYV
v4l2-ctl -d /dev/video0 --set-parm=30
这里使用如下命令采集一帧画面报错到/data/01.yuv
v4l2-ctl --verbose -d /dev/video21 --set-fmt-video=width=640,height=480,pixelformat=YUYV --stream-mmap=4 --stream-skip=3 --stream-count=5 --stream-to=/data/01.yuv --stream-poll
将文件通过使用adb上传到PC端使用7YUV工具查看
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-q4KF0v9W-1690975182909)(C:\Users\Administrator\AppData\Local\Temp\Image.png)]](https://img-blog.csdnimg.cn/77ee08ae48a146d391c1c1c7c0dd69b6.png)
摄像头MJPG格式画面采集
mjpg-streamer 是 github上一个开源的 uvc 视频应用,它可以获取摄像头的视频流,然后通过局域网传输,可以直接在armsom-w3开发板上编译这个代码并运行:
git clone https://github.com/andyshrk/mjpg-streamer.git
cd mjpg-streamer/mjpg-streamer-experimental/
apt install cmake libjpeg62-turbo-dev build-essential
make
在编译过程中,遇到两个报错问题,防止后续遇上再找资料,这里也附上:
Scanning dependencies of target input_opencv
make[3]: 离开目录“/root/mjpg-streamer/mjpg-streamer-experimental/_build”
make[3]: 进入目录“/root/mjpg-streamer/mjpg-streamer-experimental/_build”
[ 34%] Building CXX object plugins/input_opencv/CMakeFiles/input_opencv.dir/input_opencv.cpp.o
/root/mjpg-streamer/mjpg-streamer-experimental/plugins/input_opencv/input_opencv.cpp:86:5: warning: invalid suffix on literal; C++11 requires a space between literal and string macro [-Wliteral-suffix]
86 | " Help for input plugin…: “INPUT_PLUGIN_NAME”\n"
| ^
/root/mjpg-streamer/mjpg-streamer-experimental/plugins/input_opencv/input_opencv.cpp: In function ‘void* worker_thread(void*)’:
/root/mjpg-streamer/mjpg-streamer-experimental/plugins/input_opencv/input_opencv.cpp:408:34: error: ‘CV_IMWRITE_JPEG_QUALITY’ was not declared in this scope; did you mean ‘IN_CMD_JPEG_QUALITY’?
408 | compression_params.push_back(CV_IMWRITE_JPEG_QUALITY);
| ^~~~~~~~~~~~~~~~~~~~~~~
| IN_CMD_JPEG_QUALITY
make[3]: *** [plugins/input_opencv/CMakeFiles/input_opencv.dir/build.make:82:plugins/input_opencv/CMakeFiles/input_opencv.dir/input_opencv.cpp.o] 错误 1
make[3]: 离开目录“/root/mjpg-streamer/mjpg-streamer-experimental/_build”
make[2]: *** [CMakeFiles/Makefile2:468:plugins/input_opencv/CMakeFiles/input_opencv.dir/all] 错误 2
make[2]: 离开目录“/root/mjpg-streamer/mjpg-streamer-experimental/_build”
make[1]: *** [Makefile:149:all] 错误 2
make[1]: 离开目录“/root/mjpg-streamer/mjpg-streamer-experimental/_build”
make: *** [Makefile:19:all] 错误 2
root@linaro-alip:~/mjpg-streamer/mjpg-streamer-experimental#
-
1.关于无效后缀的警告: 找到 “/root/mjpg-streamer/mjpg-streamer-experimental/plugins/input_opencv/input_opencv.cpp” 文件的第86行,并确保在
" Help for input plugin..: "INPUT_PLUGIN_NAME"\n"中的字符串宏INPUT_PLUGIN_NAME之前有一个空格。 -
2.关于 ‘CV_IMWRITE_JPEG_QUALITY’ 未声明的错误: 找到 “/root/mjpg-streamer/mjpg-streamer-experimental/plugins/input_opencv/input_opencv.cpp” 文件的第408行,并将 ‘CV_IMWRITE_JPEG_QUALITY’ 替换为 ‘IN_CMD_JPEG_QUALITY’。
编译成功之后执行如下命令验证
./mjpg_streamer -i "./input_uvc.so -n -f 30 -r 640x480 -d /dev/video21" -o "./output_http.so -w ./www" &
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-f4mkYuwI-1690975182909)(C:\Users\Administrator\AppData\Local\Temp\Image.png)]](https://img-blog.csdnimg.cn/0fa9b1ece43345e395043f7177171db3.png)
查看开发板的ip地址
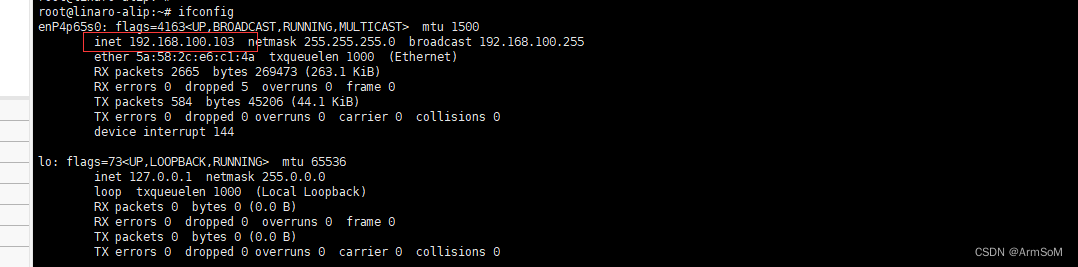
在局域网内,任何电脑的网页端打开如下网址:http://192.168.100.103:8080/?action=stream 你就能实时看到摄像头采集到的视频流。
RK3588开发板 (armsom-w3) 之 USB摄像头
ArmSoM 产品介绍: http://wiki.armsom.org/index.php/ArmSoM-w3
ArmSoM 技术论坛: http://forum.armsom.org/
这篇关于ArmSoM-W3开发板 (RK3588) 之 USB摄像头图像预览的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






