本文主要是介绍步进电机分类、工作原理、主要参数、控制时序及电路图简易分析(四),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
目录
二、步进电机的控制
驱动细分
单4拍(整步)方式驱动时序
双4拍(整步)方式驱动时序
8拍(半步)方式驱动时序
三、电路图
简易电路
驱动芯片电路
二、步进电机的控制
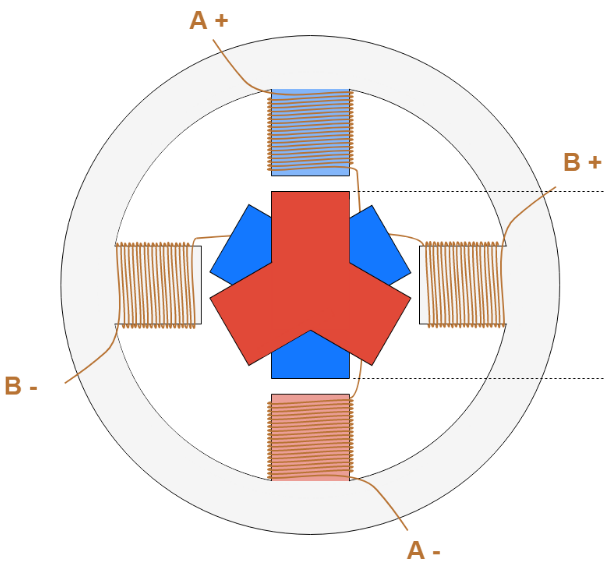
控制以两相步进电机(两个线圈,四条线)为例,(A+)-(B+)-(A-)-(B-)。
驱动细分
步进电机细分:步进电机细分驱动技术是七十年代中期发展起来的一种可以显著改善步进电机综合使用性能的驱动控制技术。它是通过控制各相绕组中的电流,使它们按一定的规律上升或下降,即在零电流到最大电流之间形成多个稳定的中间电流状态,相应的合成磁场矢量的方向也将存在多个稳定的中间状态,且按细分步距旋转。其中合成磁场矢量的幅值决定了步进电机旋转力矩的大小,合成磁场矢量的方向决定了细分后步距角的大小。细分驱动技术进一步提高了步进电机转角精度和运行平稳性。
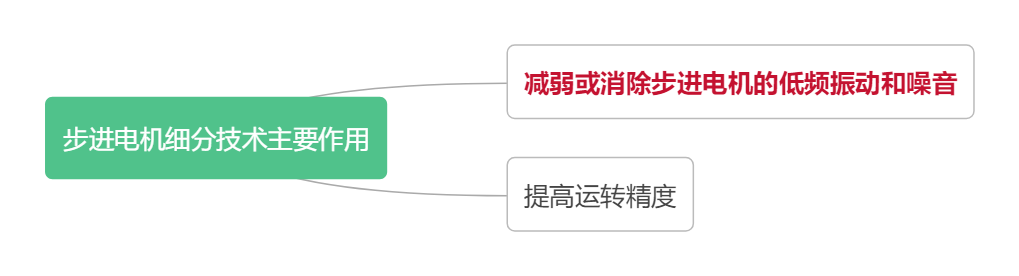
步进电机的细分技术实质上是一种电子阻尼技术,其主要目的是减弱或消除步进电机的低频振动,提高电机的运转精度只是细分技术的一个附带功能。细分后电机运行时的实际步距角是基本步距角的几分之一。
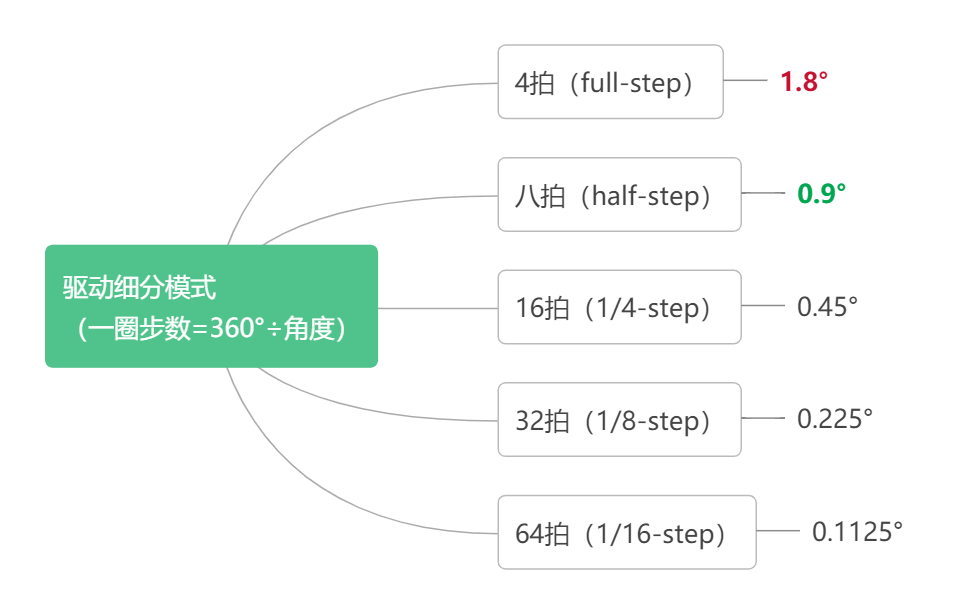
直接用高低电平的方式驱动两相四线电机有4拍,八拍的方式,对应的细分为full-step、half-step。而步进电机驱动芯片可以实现更加细致的控制,1/4-step、1/8-step、1/16-step。
两相步进电机的基本步距角是1.8°,即一个脉冲走1.8°,如果没有细分,则是200个脉冲走一圈360°,细分是通过驱动器靠精确控制电机的相电流所产生的,与电机无关,如果是10细分,则发一个脉冲电机走0.18°,即2000个脉冲走一圈360°,电机的精度能否达到或接近0.18°,还取决于细分驱动器的细分电流控制精度等其它因素。不同厂家的细分驱动器精度可能差别很,细分数越大精度越难控制。
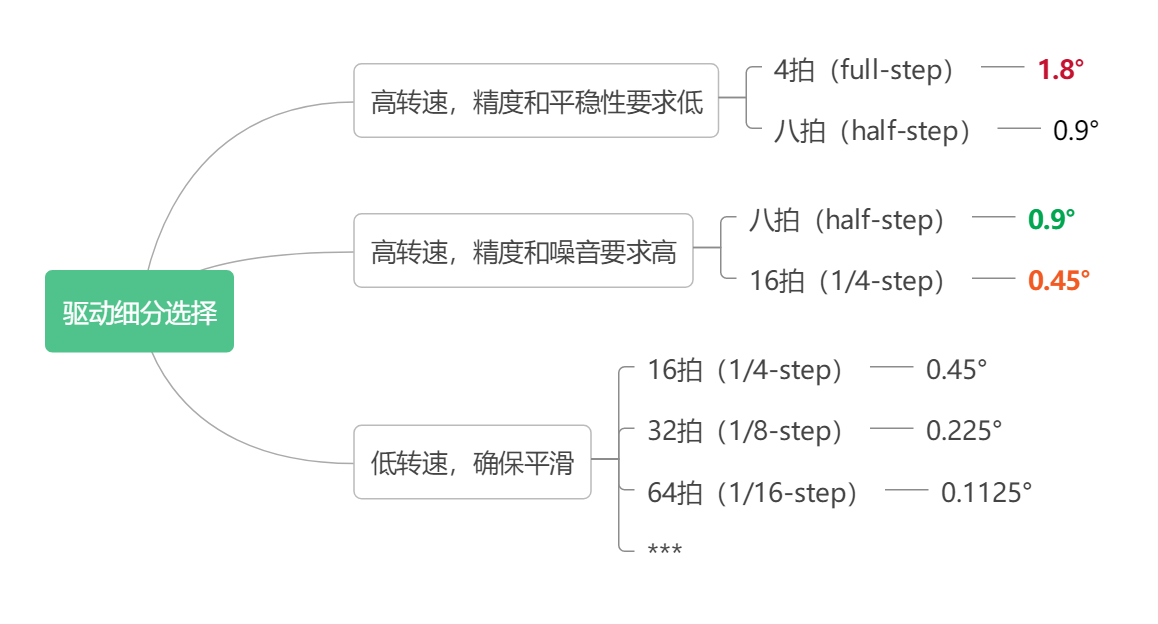
在电机实际使用时,如果对转速要求较高,且对精度和平稳性要求不高的场合,不必选高细分。如果转速很低情况下,应该选大细分,确保平滑,减少振动和噪音。根据应用场景选择合适的细分模式能提高电机运行的稳定度和减小噪音。
单4拍(整步)方式驱动时序
单4拍线圈上电时序表如下:
双4拍(整步)方式驱动时序
双4拍线圈上电时序表如下:
电机转动方向如下所示,(A+)---(B+)---(A-)---(B-),以此循环,

8拍(半步)方式驱动时序
8拍线圈上电时序表如下:
电机转动方向如下所示,再次从头循环
(A+)---(A+B+)---(B+)--(B+A-)---(A-)---(A-B-)---(B-)---(B-A+)

反转时,控制时序倒过来控制就可实现反向转动。
三、电路图
简易电路
简易电路指通过单片机控制导通顺序,然后通过功率器件放大电流驱动步进电机。如下图所示,51单片机控制四线导通状态,然后通过ULN2003放大电流实现控制步进电机的功能。
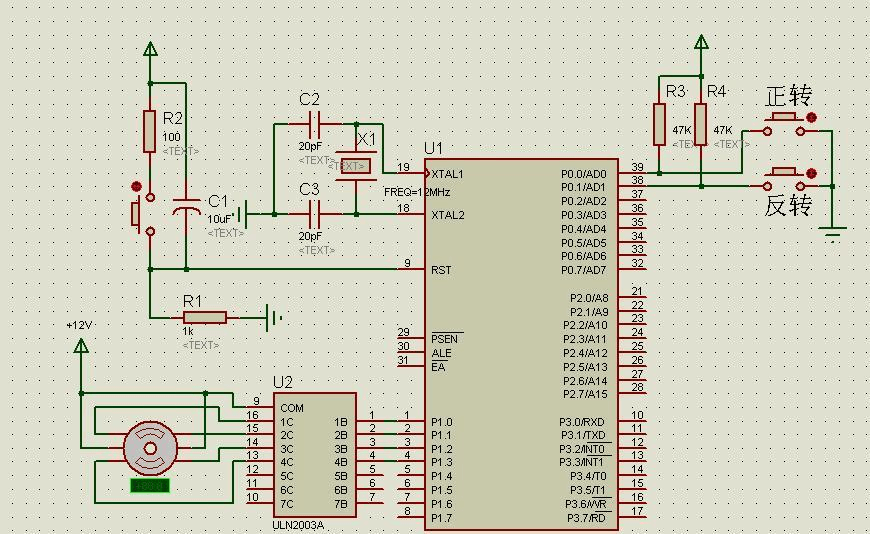
电路主要特点是电路简单,成本低,缺点是开环控制精度差,无法判定是否丢不与越步。
如要判定是否动作需加传感器辅助,以实现简单闭环控制。
驱动芯片电路
以TI的DRV8899-Q1车规级步进电机驱动芯片为例,可 支持高达 1A 的满量程电流,配备内部微步进索引器、智能调谐衰减技术、先进的失速检测算法和集成电流感 应功能。DRV8899-Q1 具有一个简单的步进/方向控制 接口来管理方向和步进速率,支持多达 1/256 级微步 进,以实现平滑的运动轨迹。 其内部带VM 欠压锁定 、 过流保护 、 开路负载检测 、 过热警告和关断 、 欠温警告 等功能模块。 简化版原理图如下。

功能框图如下图所示:
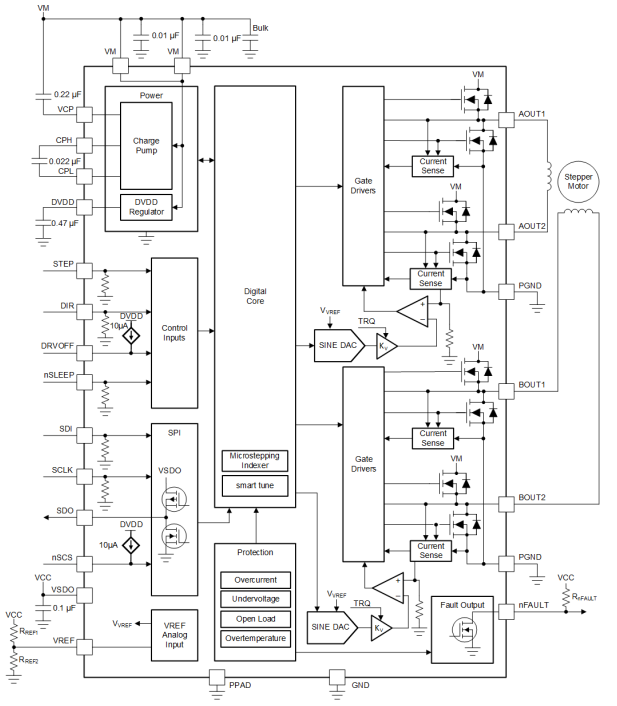
电路主要特点是电路控制简单,成本较高,控制精度较高,缺点是成本较高,通过算法实现步进判定,有误判的可能。
本文主要介绍理论基础,后续会增加电路设计章节及其控制程序。
这篇关于步进电机分类、工作原理、主要参数、控制时序及电路图简易分析(四)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!


