本文主要是介绍使用Arduino和A4988步进驱动器模块控制NEMA 17步进电机,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
原文:https://circuitdigest.com/microcontroller-projects/controlling-nema-17-stepper-motor-with-arduino-and-a4988-stepper-driver-module
使用Arduino和A4988步进驱动器模块控制NEMA 17步进电机
ARDUINO项目
经过**阿什什·乔杜里(Ashish Choudhary)** 2019年9月10日修改
 用Arduino和电位计控制NEMA 17步进电机
用Arduino和电位计控制NEMA 17步进电机
步进电机是一个直流电机的,在不连续的步骤和工作从监控摄像机到处用于先进的机器人和机器。步进电机可提供精确的控制,并可根据转矩,每转步数和输入电压加以区分。在我们之前的项目中,我们使用Arduino控制28-BYJ48步进电机。28-BYJ48的扭矩比其他步进电机(例如NEMA 14,NEMA17)低。
在本教程中,我们将使用Arduino Uno和A4988步进驱动器模块控制NEMA17步进电机。与28-BYJ48相比,Nema17步进电机具有更高的转矩和更高的工作电压。此处还将连接一个电位计,以控制步进电机的方向。
所需组件
- Arduino UNO
- NEMA17步进电机
- A4988步进驱动器模块
- 47 µf电容器
- 电位器
NEMA17步进电机
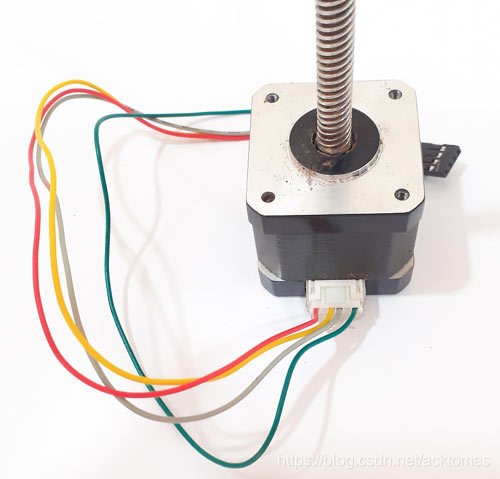
Nema17的操作类似于普通的步进电机。NEMA 17步进电机具有1.7 x 1.7英寸的面板,通常比较小的型号(例如NEMA 14)具有更大的扭矩。该电机有六根导线,额定电压为12伏。可以在较低的电压下运行,但扭矩会下降。步进电机不旋转,它们步进,并且NEMA17电机的步进角为1.8度。表示每一步都覆盖1.8度。NEMA17的接线图如下。
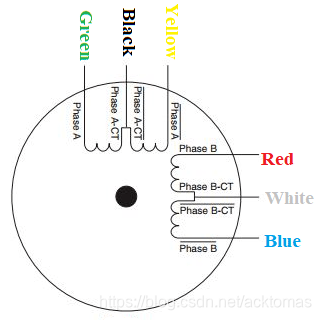
如您所见,该电动机具有单极六线制。这些导线连接在两个分开的绕组中。黑色,黄色,绿色电线是第一绕组的一部分,其中黑色是中心抽头,黄色和绿色是线圈端,而红色,白色和蓝色是第二绕组的一部分,其中白色是中心抽头,红色和蓝色是线圈端线。通常,中心抽头导线保持断开状态。
NEMA17的每转步数
特定步进电机的每转步数是使用该步进电机的步距角计算的。因此,在这种情况下,NEMA 17步距角为1.8度。
Steps per Revolution= 360 / step angle
360 / 1.8 =200 Steps Per Revolution
NEMA17的规格
- 额定电压:12V DC
- 步距角:1.8度
- 阶段数:4
- 电机长度:1.54英寸
- 4线8英寸引线
- 每转200步,1.8度
- 工作温度:-10至40°C
- 单极保持扭矩:22.2盎司
还要在此处检查与步进电机有关的各种项目,这不仅包括与各种微控制器的基本接口,而且还有涉及步进电机的机器人项目。
A4988步进驱动器模块
步进驱动器模块控制步进电机的工作。步进驱动器通过各个相位将电流发送到步进电机。
的A4988的Nema 17步进驱动器是用来控制双极步进电动机一微步驱动器模块。该驱动器模块具有内置转换器,这意味着我们可以使用控制器中很少的引脚来控制步进电机。
使用此Nema 17电机驱动器模块,我们可以仅使用两个引脚(即STEP和DIRECTION)来控制步进电机。STEP引脚用于控制步进,而DIRECTION引脚用于控制电动机的方向。A4988驱动程序模块提供五种不同的步骤分辨率:全步,半步,四分之一步,八步和十六步。您可以使用分辨率选择器引脚((MS1,MS2和MS3)选择不同的步长分辨率。这些引脚的真值表如下所示:
| MS1 | MS2 | MS3 | 微步分辨率 |
|---|---|---|---|
| 低的 | 低的 | 低的 | 全步 |
| 高的 | 低的 | 低的 | ½步(半步) |
| 低的 | 高的 | 低的 | ¼步(四分之一步) |
| 高的 | 高的 | 低的 | 1/8步(第八步) |
| 高的 | 高的 | 高的 | 1/16步(第16步) |
A4988的规格
最大限度。工作电压:35V
最小 工作电压:8V
最大限度。每相电流:2A
微步分辨率:全步,1/2步,¼步,1/8和1/16步
反向电压保护:否
尺寸:15.5×20.5毫米(0.6英寸×0.8英寸)
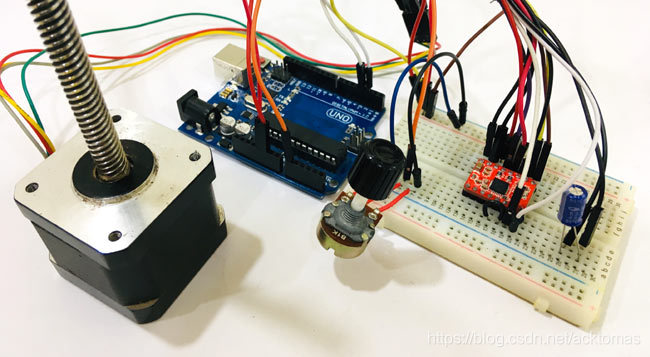
电路图

上图 给出了使用Arduino控制Nema 17步进电机的电路图 。由于A4988模块具有内置转换器,这意味着我们只需要将Step和Direction引脚连接到Arduino即可。步进销用于控制步进,方向销用于控制方向。步进电机使用12V电源供电,而A4988模块通过Arduino供电。电位器用于控制电动机的方向。
如果顺时针旋转电位器,则步进器将顺时针旋转,如果逆时针旋转电位器,则其将逆时针旋转。47 µf电容器用于保护电路板免受尖峰电压的影响。MS1,MS2和MS3引脚保持断开状态,这意味着驱动器将以全步模式运行。
下表列出了Arduino Nema 17 A4988的完整连接 。
| 序号 | A4988针 | 联系 |
|---|---|---|
| 1个 | 虚拟机 | + ve电池 |
| 2个 | 地线 | -ve电池 |
| 3 | VDD | Arduino的5V |
| 4 | 地线 | Arduino的GND |
| 5 | STP | Arduino的引脚3 |
| 6 | DIR | Arduino的Pin 2 |
| 7 | 1A,1B,2A,2B | 步进电机 |
代码说明
本教程的末尾给出了具有可运行视频控制Nema 17和Arduino的完整代码 ,在这里我们将解释用于理解项目工作的完整程序。
首先,将步进电机库添加到您的Arduino IDE中。您可以从此处下载步进电机库。
在那之后,定义NEMA 17的步骤编号。NEMA 17的每转步数为200。
#include <Stepper.h>
#define STEPS 200
然后,指定驱动器模块所连接的引脚,并将电动机接口类型定义为*Type1,*因为电动机是通过驱动器模块连接的。
Stepper stepper(STEPS,2,3);
#define motorInterfaceType 1
接下来,使用stepper.setSpeed功能设置步进电机的速度。NEMA 17的最大电动机速度为4688 RPM,但如果运行速度超过1000 RPM,则转矩会迅速下降。
void setup(){ stepper.setSpeed(1000);
现在在*主*循环中,我们将从A0引脚读取电位器值。在此循环中,有两个函数,一个是potVal,另一个是Pval。如果当前值(即potVal)高于上一个值(即Pval),则它将沿顺时针方向移动十步;如果当前值小于先前值,则potVal将沿逆时针方向移动十步。 。
potVal = map(analogRead(A0),0,1024,0,500); if(potVal> Pval)stepper.step(10); if(potVal <Pval)stepper.step(-10);Pval = potVal;
现在,将Arduino与您的笔记本电脑连接,然后使用Arduino IDE将代码上传到Arduino UNO板上,选择板和端口号,然后单击上载按钮。
现在,您可以使用电位计控制Nema17步进电机的方向。以下视频显示了该项目的完整工作。如果您对此项目有任何疑问,请在下面的评论部分中发布。
#include <Stepper.h>
#define STEPS 200// Define stepper motor connections and motor interface type. Motor interface type must be set to 1 when using a driver
Stepper stepper(STEPS, 2, 3); // Pin 2 connected to DIRECTION & Pin 3 connected to STEP Pin of Driver
#define motorInterfaceType 1
int Pval = 0;
int potVal = 0;void setup() {// Set the maximum speed in steps per second:stepper.setSpeed(1000);
}
void loop() {potVal = map(analogRead(A0),0,1024,0,500);if (potVal>Pval)stepper.step(10);if (potVal<Pval)stepper.step(-10);Pval = potVal;}这篇关于使用Arduino和A4988步进驱动器模块控制NEMA 17步进电机的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




