本文主要是介绍2069. 模拟行走机器人 II,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
2069. 模拟行走机器人 II
给你一个在 XY 平面上的 width x height 的网格图,左下角 的格子为 (0, 0) ,右上角 的格子为 (width - 1, height - 1) 。网格图中相邻格子为四个基本方向之一(“North”,“East”,“South” 和 “West”)。一个机器人 初始 在格子 (0, 0) ,方向为 “East” 。
机器人可以根据指令移动指定的 步数 。每一步,它可以执行以下操作。
沿着当前方向尝试 往前一步 。
如果机器人下一步将到达的格子 超出了边界 ,机器人会 逆时针 转 90 度,然后再尝试往前一步。
如果机器人完成了指令要求的移动步数,它将停止移动并等待下一个指令。
请你实现 Robot 类:
Robot(int width, int height) 初始化一个 width x height 的网格图,机器人初始在 (0, 0) ,方向朝 "East" 。
void move(int num) 给机器人下达前进 num 步的指令。
int[] getPos() 返回机器人当前所处的格子位置,用一个长度为 2 的数组 [x, y] 表示。
String getDir() 返回当前机器人的朝向,为 "North" ,"East" ,"South" 或者 "West" 。
示例 1:
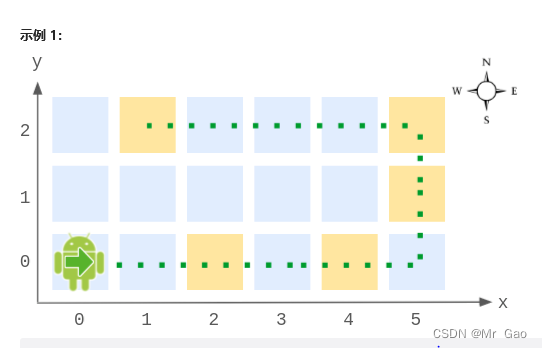
example-1
输入:
[“Robot”, “move”, “move”, “getPos”, “getDir”, “move”, “move”, “move”, “getPos”, “getDir”]
[[6, 3], [2], [2], [], [], [2], [1], [4], [], []]
输出:
[null, null, null, [4, 0], “East”, null, null, null, [1, 2], “West”]
解释:
Robot robot = new Robot(6, 3); // 初始化网格图,机器人在 (0, 0) ,朝东。
robot.move(2); // 机器人朝东移动 2 步,到达 (2, 0) ,并朝东。
robot.move(2); // 机器人朝东移动 2 步,到达 (4, 0) ,并朝东。
robot.getPos(); // 返回 [4, 0]
robot.getDir(); // 返回 “East”
robot.move(2); // 朝东移动 1 步到达 (5, 0) ,并朝东。
// 下一步继续往东移动将出界,所以逆时针转变方向朝北。
// 然后,往北移动 1 步到达 (5, 1) ,并朝北。
robot.move(1); // 朝北移动 1 步到达 (5, 2) ,并朝 北 (不是朝西)。
robot.move(4); // 下一步继续往北移动将出界,所以逆时针转变方向朝西。
// 然后,移动 4 步到 (1, 2) ,并朝西。
robot.getPos(); // 返回 [1, 2]
robot.getDir(); // 返回 “West”
解题代码如下:
typedef struct {int drection_now;int x;int y;int x_limit;int y_limit;
} Robot;
int drection[4][2]={{1,0},{0,1},{-1,0},{0,-1}};Robot* robotCreate(int width, int height) {Robot* R=(Robot* )malloc(sizeof(Robot));R->x=0;R->y=0;R->x_limit=width-1;R->y_limit=height-1;R->drection_now=0;return R;}void robotStep(Robot* obj, int num) {int a=num;num=num%((obj->x_limit+obj->y_limit)*2);if(a!=0&&num==0 && obj->x == 0 && obj->y == 0&&obj->drection_now==0){ // 如果刚好是整数倍,走了一圈回到原地,这时方便从东变为南obj->drection_now=(obj->drection_now+3)%4;}while(num!=0){int x_new=obj->x+drection[obj->drection_now][0];int y_new=obj->y+drection[obj->drection_now][1];;if(x_new>=0&&x_new<=obj->x_limit&&y_new>=0&&y_new<=obj->y_limit){obj->x=x_new;obj->y=y_new;num--;}else{obj->drection_now=(obj->drection_now+1)%4;}}// printf("XY %d %d ", obj->x, obj->y);}int* robotGetPos(Robot* obj, int* retSize) {int *a=(int *)malloc(sizeof(int)*2);a[0]=obj->x;a[1]=obj->y;*retSize=2;// printf("--%d %d ",retSize[0],retSize[1]);return a;}
char Dir[4][10]={"East\0","North\0","West\0","South\0"};
char * robotGetDir(Robot* obj) {// printf("%d %s",obj->drection_now, Dir[obj->drection_now]);return Dir[obj->drection_now];}void robotFree(Robot* obj) {}/*** Your Robot struct will be instantiated and called as such:* Robot* obj = robotCreate(width, height);* robotStep(obj, num);* int* param_2 = robotGetPos(obj, retSize);* char * param_3 = robotGetDir(obj);* robotFree(obj);
*/
这篇关于2069. 模拟行走机器人 II的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!