本文主要是介绍NeRF从入门到放弃3: EmerNeRF,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
https://github.com/NVlabs/EmerNeRF
该方法是Nvidia提出的,其亮点是不需要额外的2D、3Dbox先验,可以自动解耦动静field。
核心思想:
1. 动、静filed都用hash grid编码,动态filed比静态多了时间t,静态的hash编码输入是(x,y,z),动态是(x,y,z,t)。
2. 使用flow融合多帧的特征,预测当前时刻的点的前向和后向的flow,最后的动态Feature是0.25pre+0.5+0.25next
3. 用3个head分别预测正常物体、天空和阴影。
3.1 SCENE REPRESENTATIONS
1 Scene decomposition
为了实现高效的场景解耦,把4D场景分解为静态场和动态场,两者都分别由可学习的hash grid(instant NGP) Hs和hd表示。(注,下标s和d分别表示static和dynamic,下文所有表示都是此含义)
这种解耦为与时间无关的特征 hs = Hs(x) 和时变特征 hd = Hd(x, t) 提供了一种灵活紧凑的 4D 场景表示,其中 x = (x, y, z) 是查询点的 3D 位置,t 表示其时间步长。这些特征通过轻量级 MLP进一步转换为动态和静态的feature(gs和gd),和用于预测每个点的密度 (σs 和 σd)。
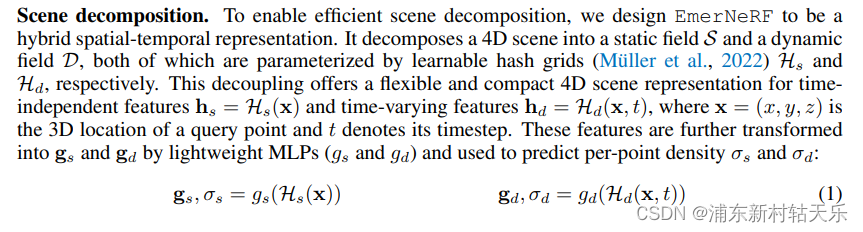
所以这一步得到每个3D点的feature和密度。
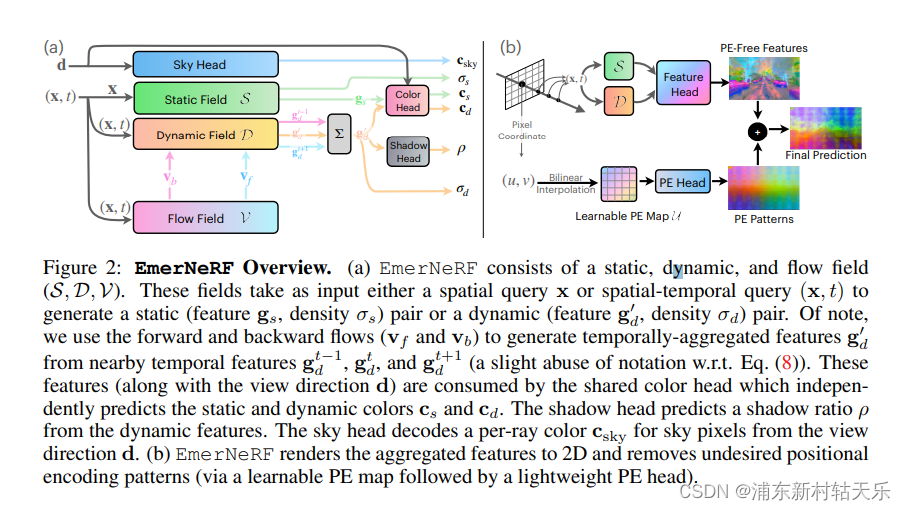
2 Multi-head prediction
用三个head分别预测 color sky 和shadow,动态和静态共享共一个color mlp。
该color head以 (gs, d) 和 (gd, d) 作为输入,并为每个点都输出一个静态和动态的颜色;由于天空的深度定义不明确,所以单独加一个head预测天空的深度;添加一个影子的head去表述动态物体的阴影,输出动态对象0-1的标量,调整静态场预测的颜色强度。
由此图可看出,MLP_color的输入分别是动态feature和朝向,shadow head的输入是动态feature,sky head的输入只是朝向(为什么要这么做,因为没有深度信息,不知道采样多少个点)。

3.2 EMERGENT SCENE FLOW
1 场景流估计(Scene flow estimation)
用flow的head对当前时刻的query点,预测前向和后向的流。最后的动态Feature是0.25pre+0.5+0.25next**
该特征聚合模块实现了三个目标:1)它将流场与场景重建损失(例如 RGB 损失)连接起来进行监督,2)它巩固特征、去噪时间属性以进行准确预测,以及 3)每个点通过其时间链接特征的共享梯度来丰富,通过共享知识提高单个点的质量
Hv和Hd应该是一样的。

flow部分代码:MLP的最后一层的输出是6维,前3维表示forward flow,后3维表示backwark flow。注意,最后一层mlp是没有激活函数的,以为要预测前后项的flow值,理论上有正负的,所以不能加激活函数。
# ======== Flow Field ======== #
self.flow_xyz_encoder = None
if self.cfg.enable_flow_branch:self.flow_xyz_encoder = HashEncoder(self.cfg.flow_xyz_encoder)self.flow_mlp = nn.Sequential(nn.Linear(self.flow_xyz_encoder.n_output_dims,self.cfg.base_mlp_layer_width,),nn.ReLU(),nn.Linear(self.cfg.base_mlp_layer_width, self.cfg.base_mlp_layer_width),nn.ReLU(),nn.Linear(self.cfg.base_mlp_layer_width, 6), # 3 for forward, 3 for backward# no activation function for flow)
2 特征聚合模块(Multi-frame feature integration)
预测出forward 和backwark flow后,加到原本的位置,即得到上一阵和下一帧的位置,把上一阵和下一帧的位置都送到动态的mlp网络中。

上图公式中,gd是动态的mlp,Hd是hash编码,也就是说当前帧点的坐标加上前后相的光流偏移量(Δx,Δy,Δz)后,和上一帧的时间t,再次进行hash编码,然后都送到动态的mlp网络中得到上一帧和下一帧的动态feature,再和当前帧的feature加权平均。
把flow和场景重建的loss损失结合起来进行监督;增强了动态部分的特征,去噪时间属性以进行准确的预测;每个点通过其时间链接特征的共享梯度来丰富,通过共享知识提高单个点的质量。
没有用显式的监督,这种能力来自于时间聚合步骤,同时优化场景重建损失。我们的假设是,只有时间一致的特征受益于多帧特征集成,这种集成间接地将场景流场驱动到最优解——预测所有点的正确流。
3 消融实验
消融研究证实了这一点:当禁用时间聚合或停止这些附近特征的梯度时,flow无法学习有意义的结果,加入flow, psnr+1
实验细节
只用了3个相机,图片resize成640x960。25K迭代,8196。静态场景把flow和dynamic分支去掉。静态场景不加feature,加feature40分钟,动态场景不加feature2小时,加feature2.25小时。
这篇关于NeRF从入门到放弃3: EmerNeRF的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!









