本文主要是介绍Audio2Face相关建模BS绑定对应表,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
| Audio2Face面部绑点说明 | ||||
|---|---|---|---|---|
| 注意事项:在Blend Shape的命名中,左右方向相对于面部。 | ||||
| 顺序 | Blend Shape命名 | 静态参照图 | 动态参照图 | 描述 |
| 1 | browLowerL |
|  | 降低左眉毛。 |
| 2 | browLowerR | 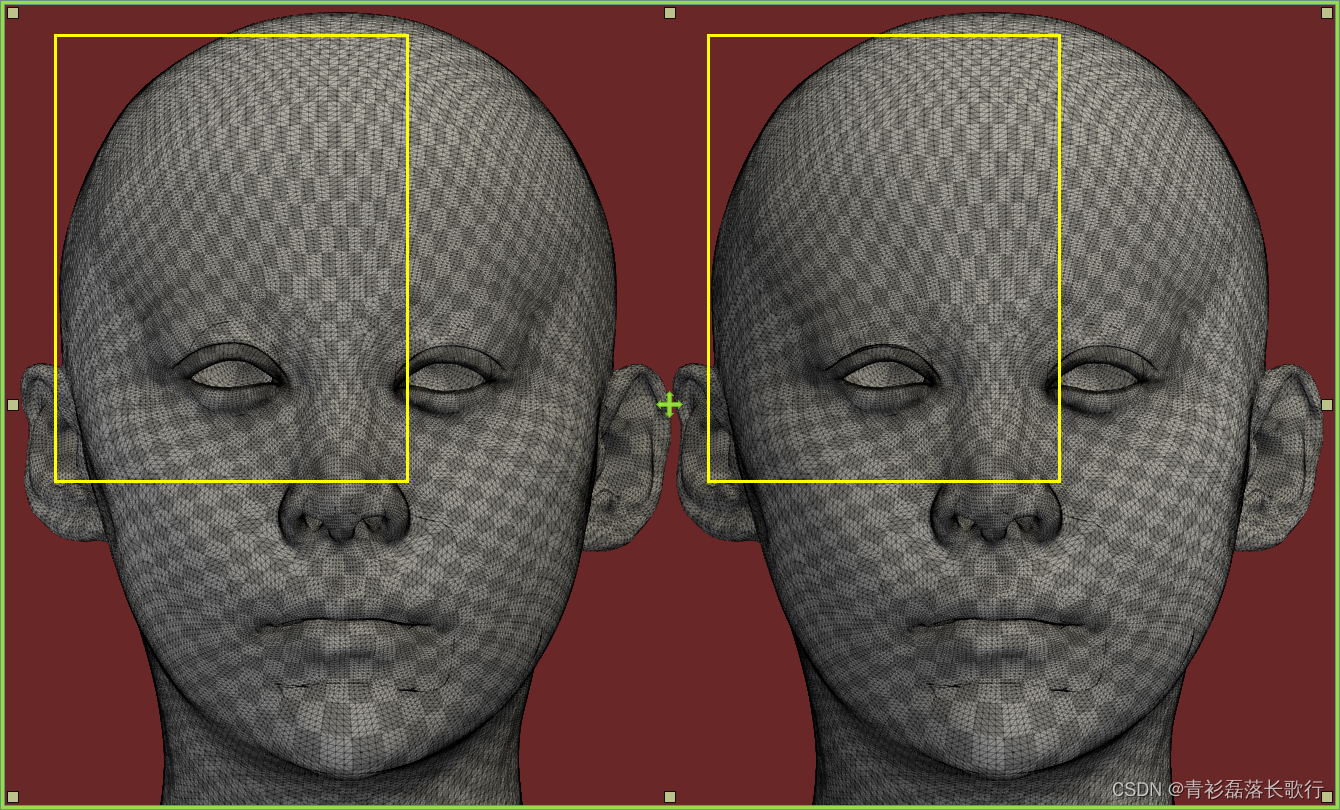 |  | 降低右眉毛。 |
| 3 | innerBrowRaiserL | 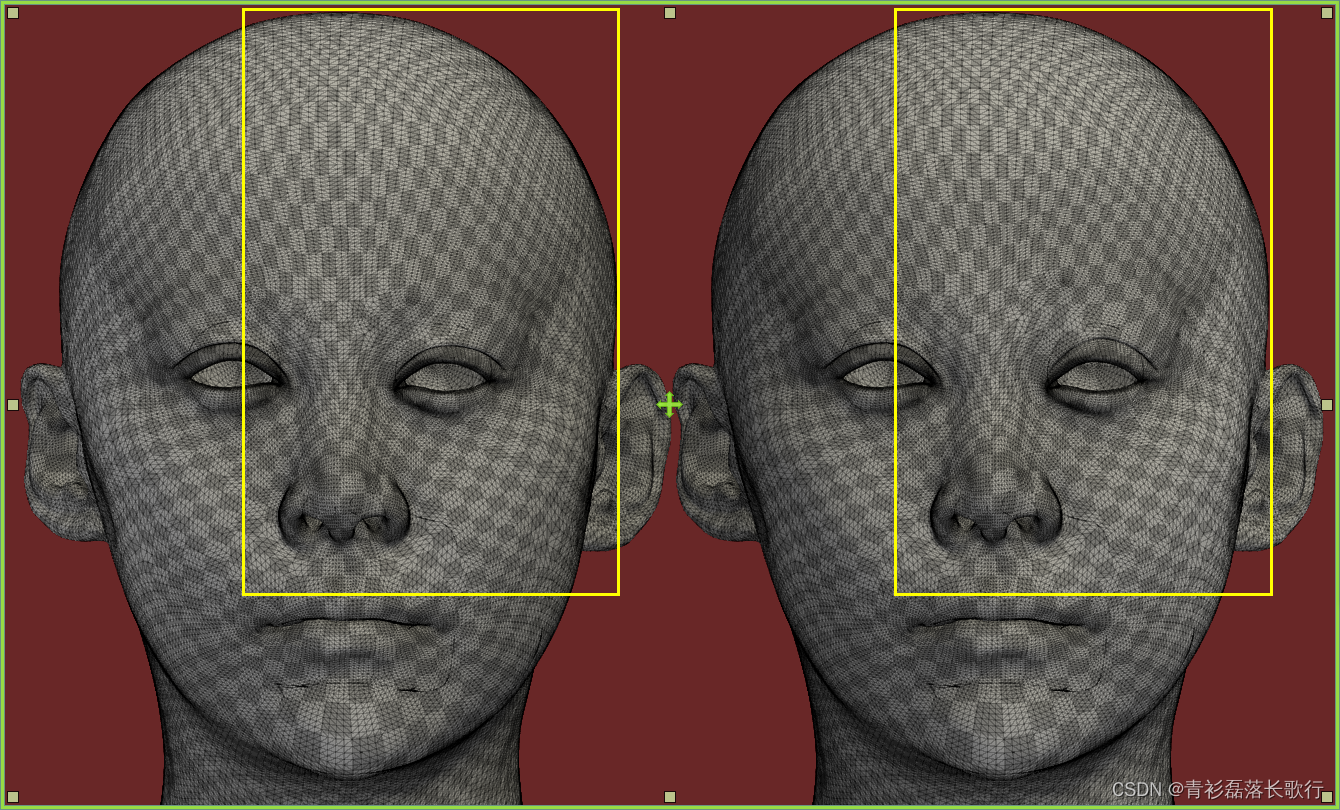 |  | 提升左眉毛的内侧部分 |
| 4 | innerBrowRaiserR | 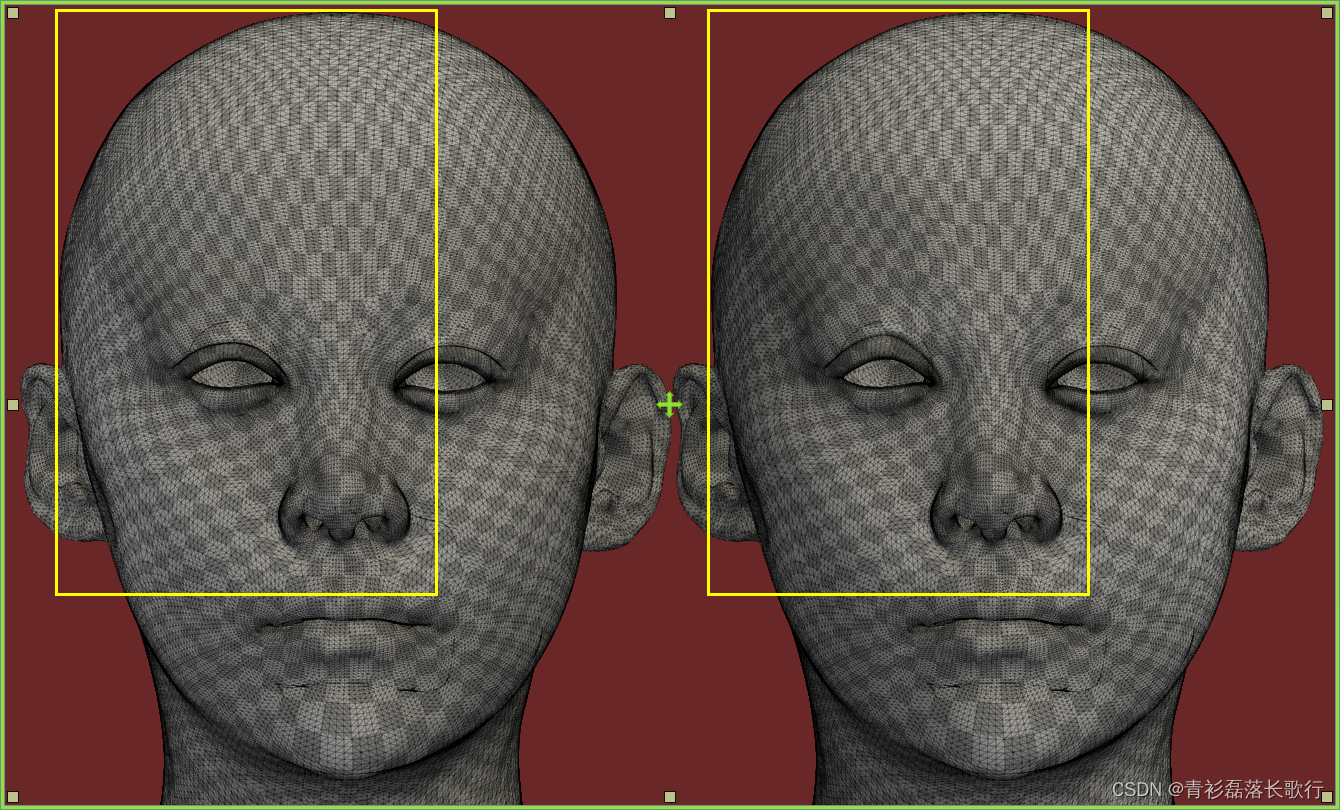 |  | 提升右眉毛的内侧部分 |
| 5 | outerBrowRaiserL | 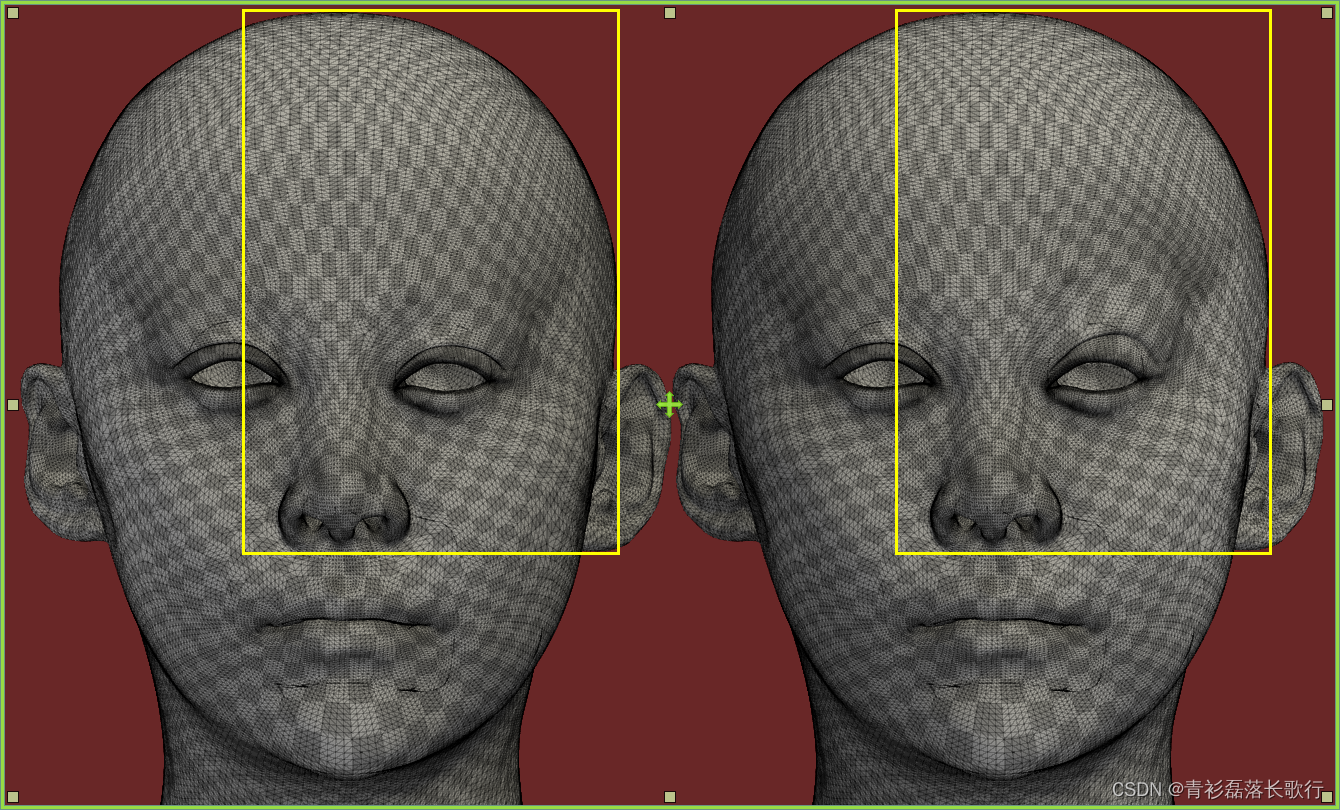 |  | 提升左眉毛的外侧部分。 |
| 6 | outerBrowRaiserR | 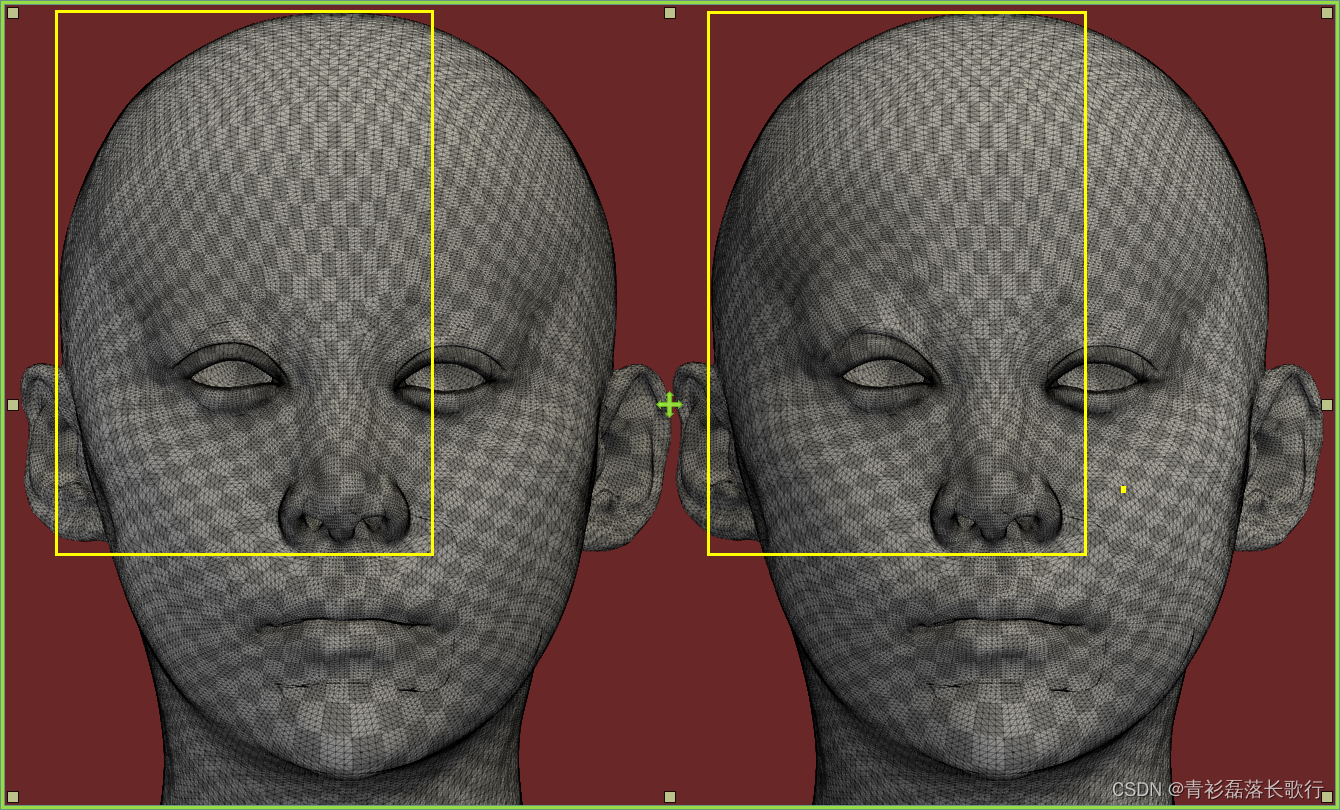 |  | 提升右眉毛的外侧部分。 |
| 7 | eyesLookLeft |  |  | 眼睛向左看。 |
| 8 | eyesLookRight | 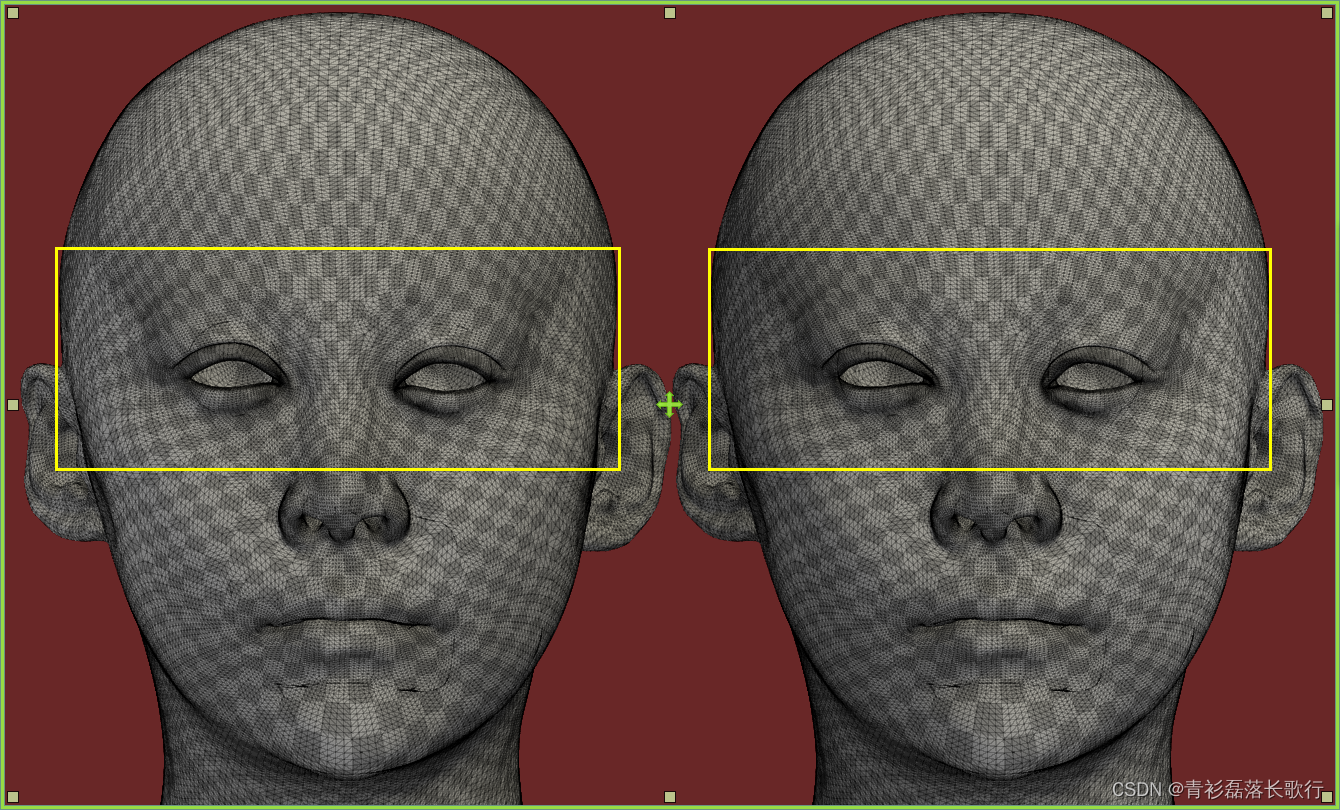 |  | 眼睛向右看。 |
| 9 | eyesLookUp | 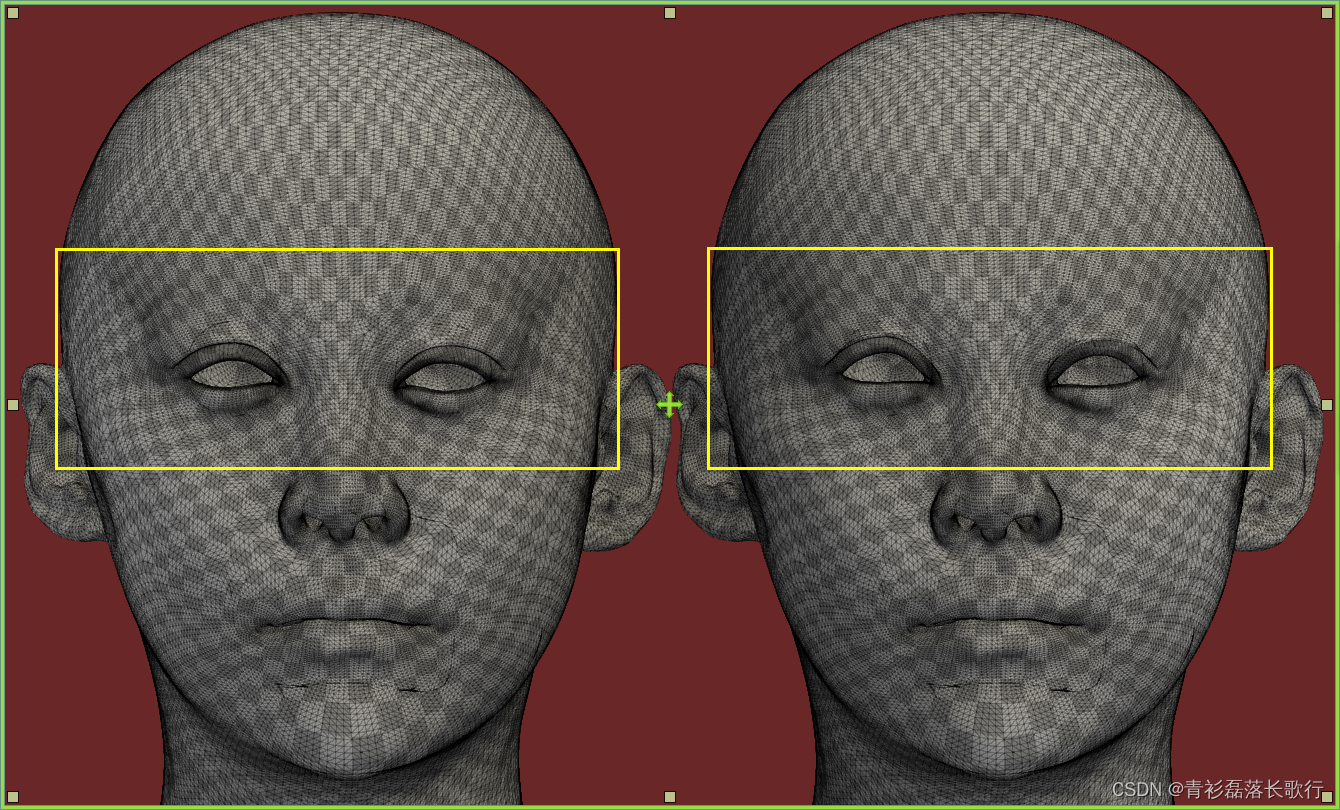 |  | 眼睛向上看。 |
| 10 | eyesLookDown | 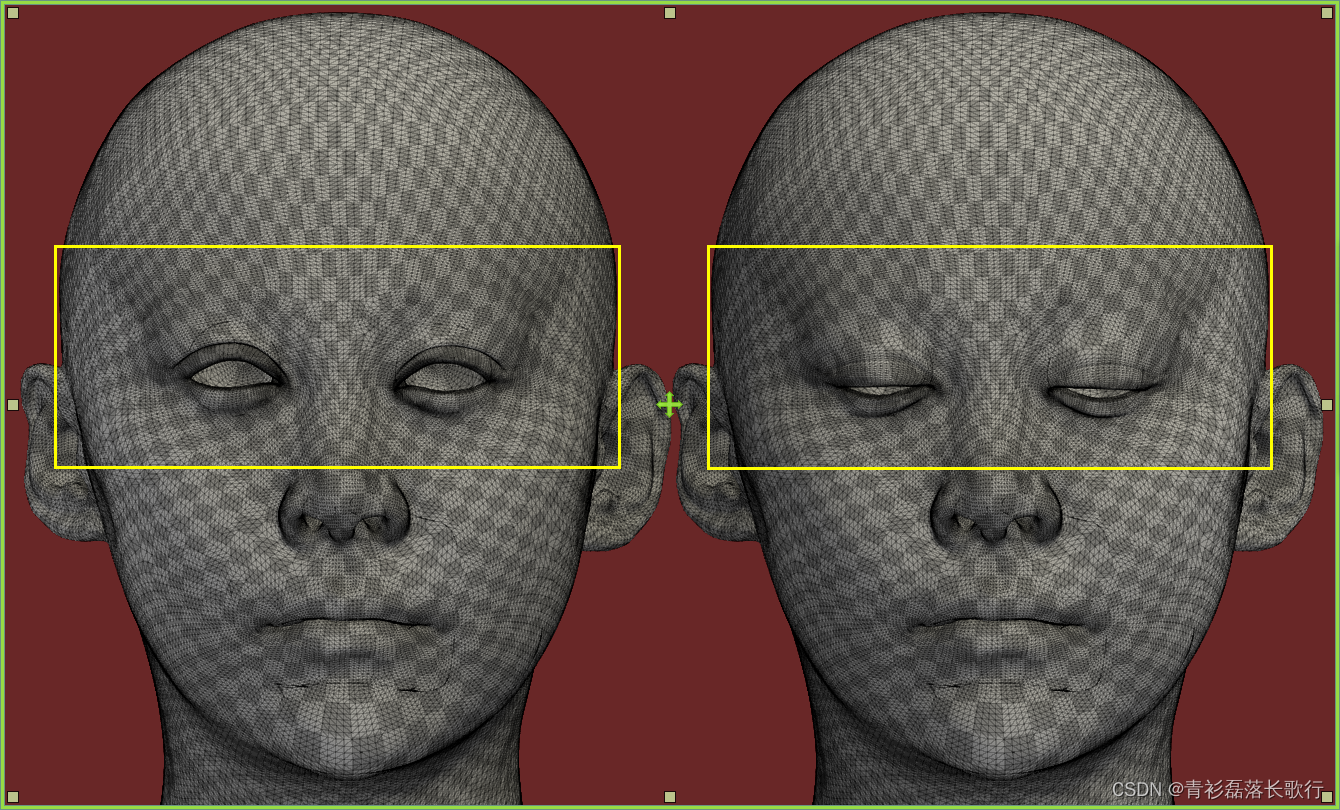 |  | 眼睛向下看。 |
| 11 | eyesCloseL | 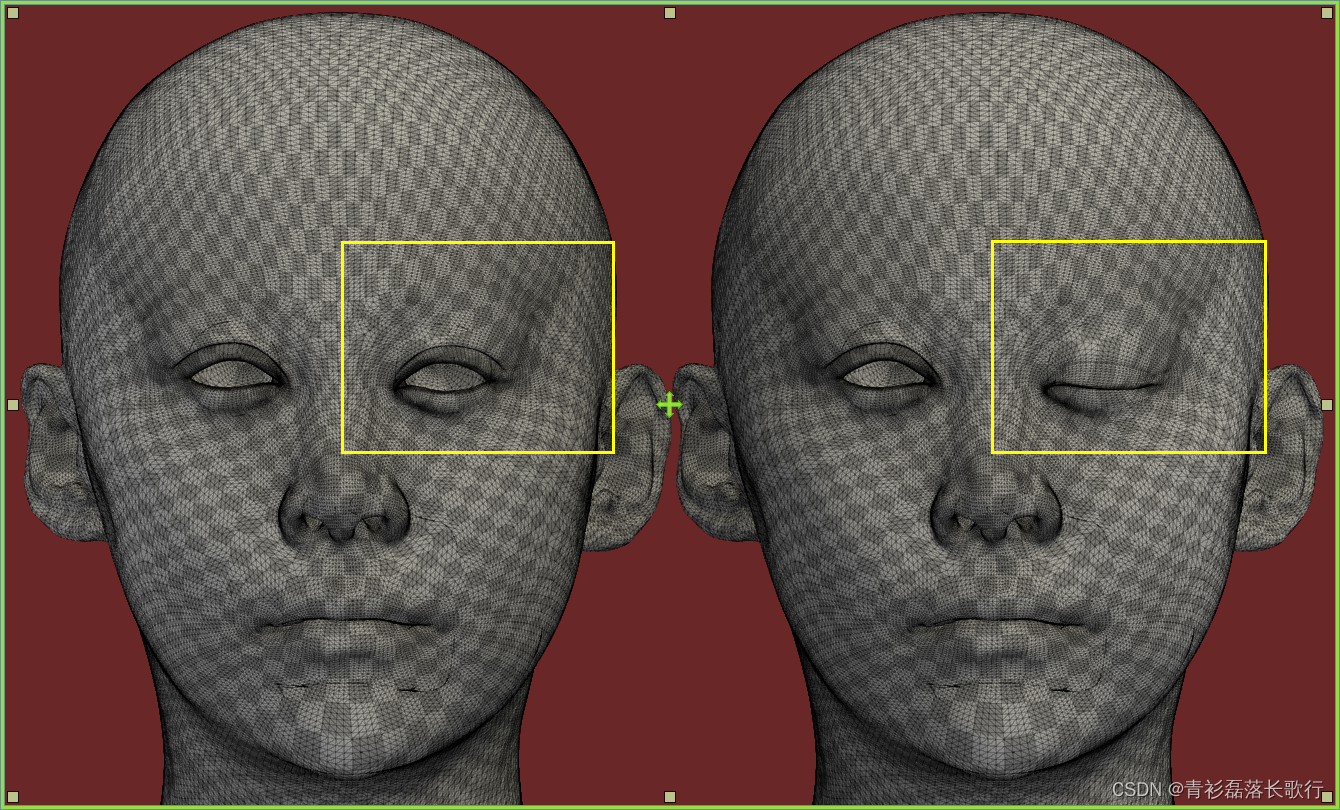 |  | 左眼睛闭上。 |
| 12 | eyesCloseR | 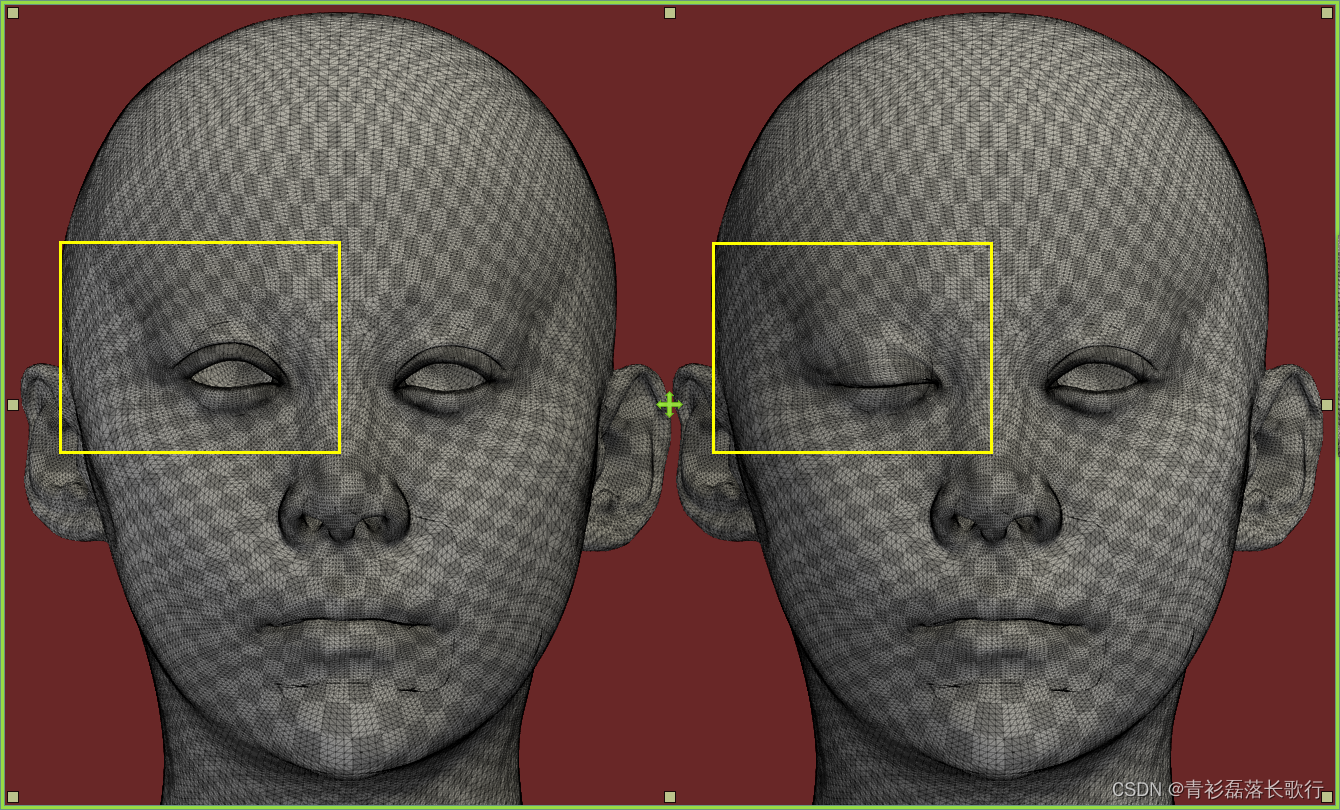 |  | 右眼睛闭上。 |
| 13 | eyesUpperLidRaiserL | 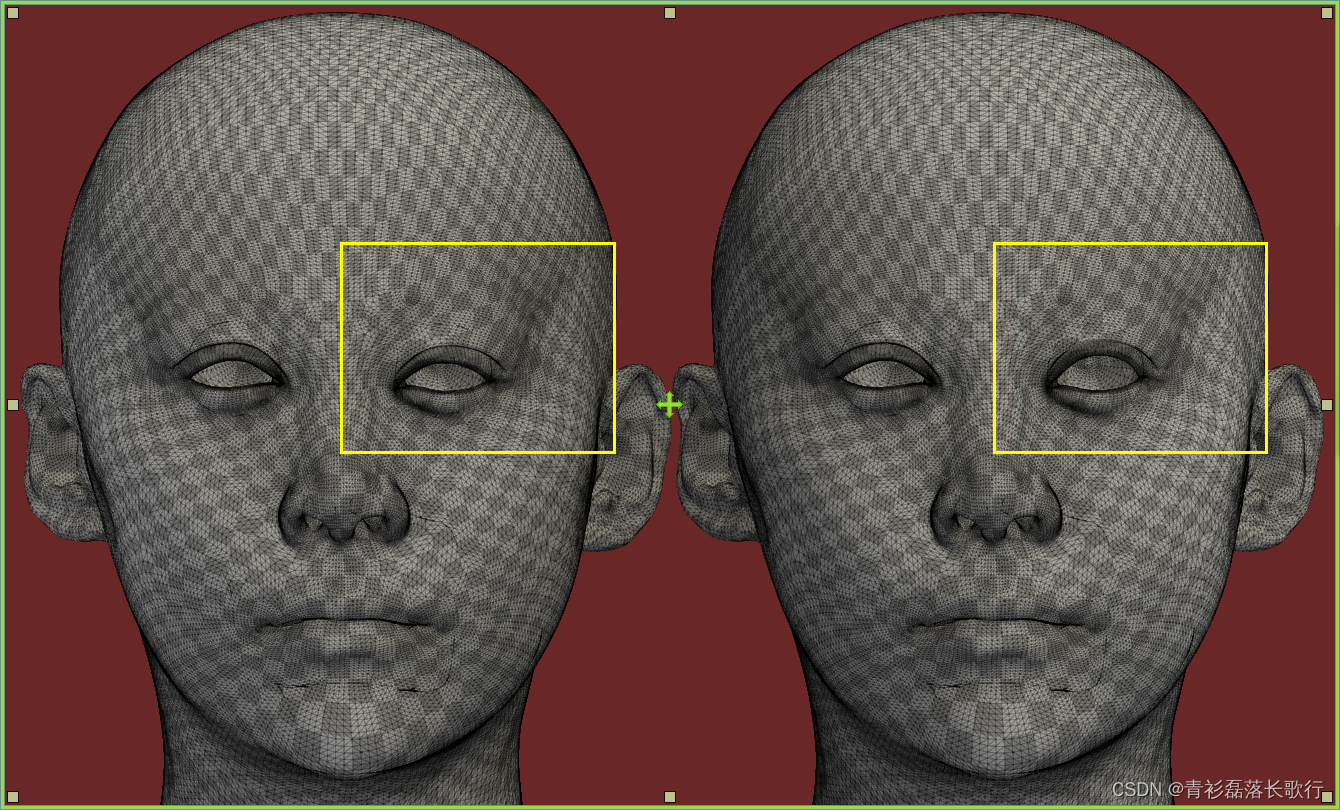 |  | 提升左眼睛的上眼睑。 |
| 14 | eyesUpperLidRaiserR | 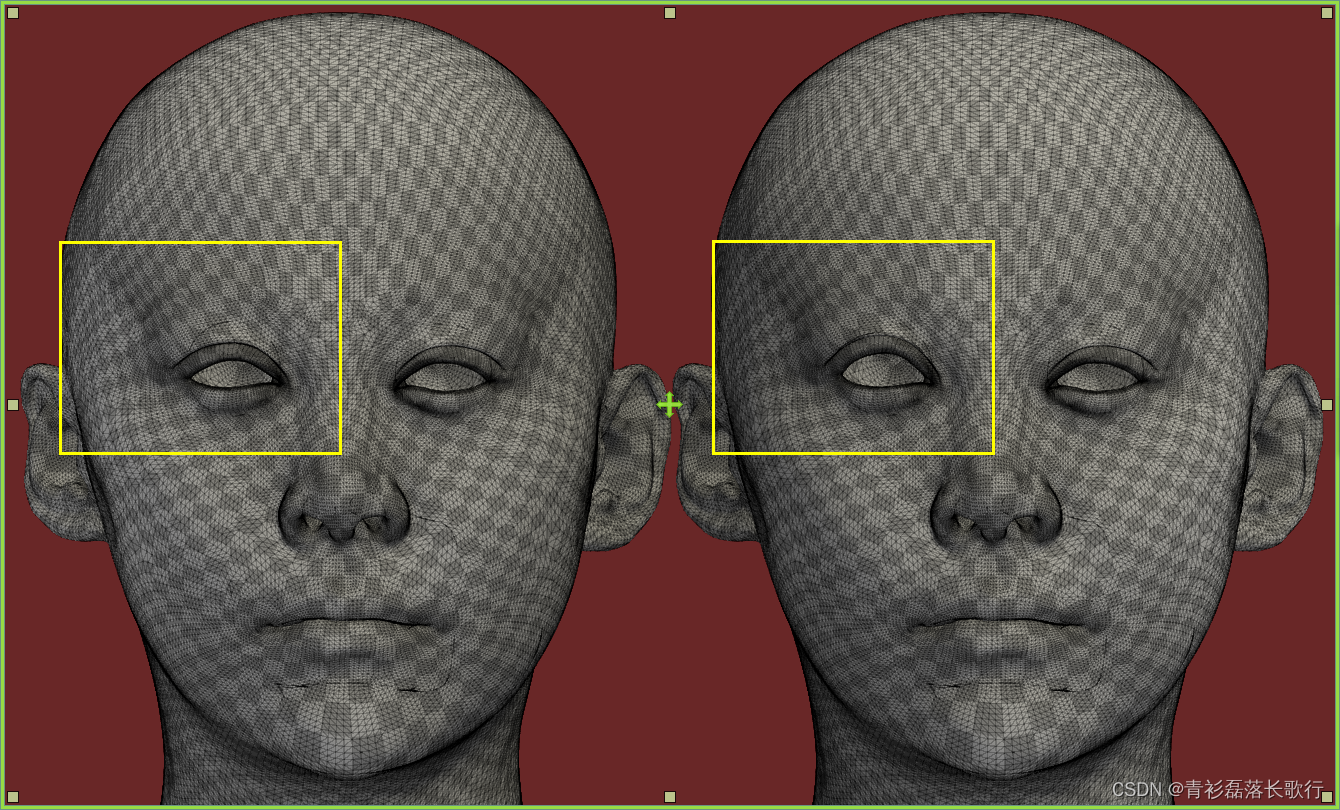 |  | 提升右眼睛的上眼睑。 |
| 15 | squintL | 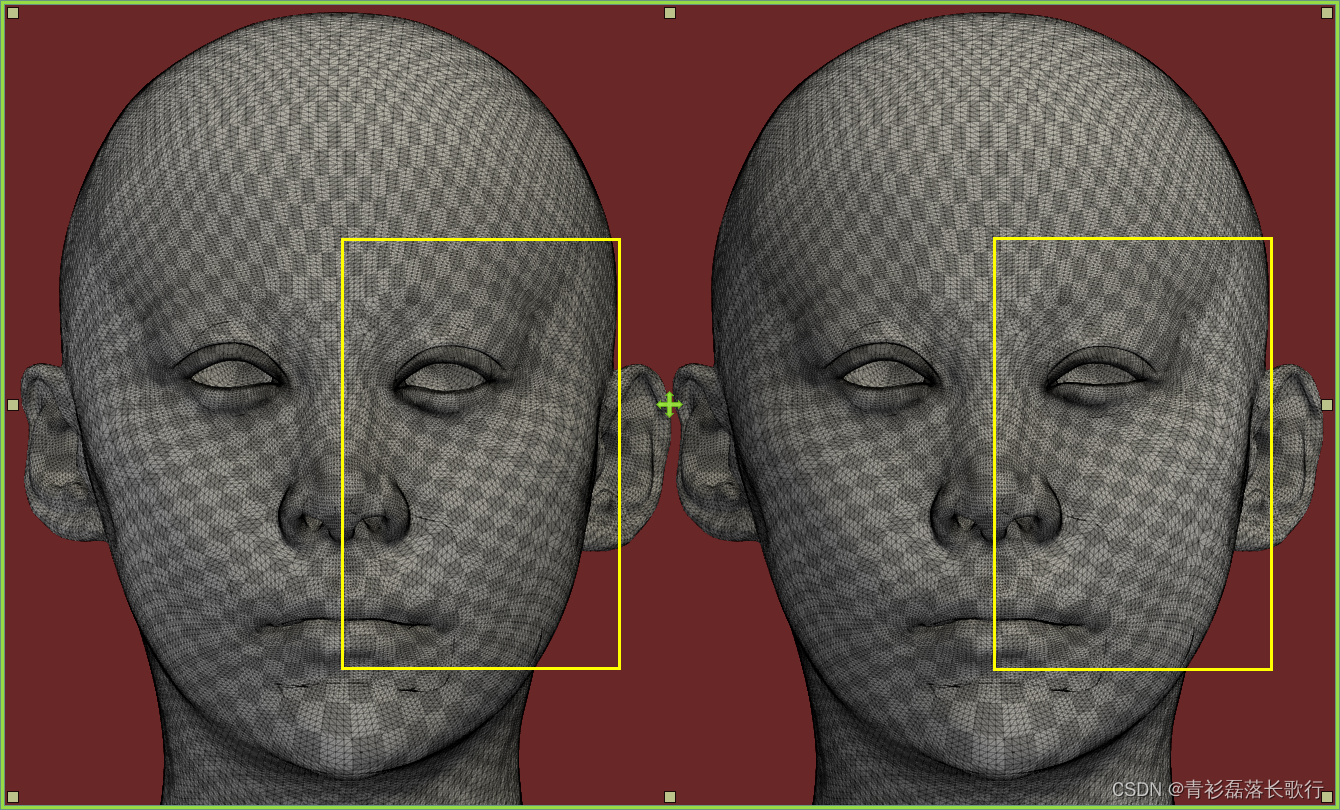 |  | 左眼睛眯起。 |
| 16 | squintR | 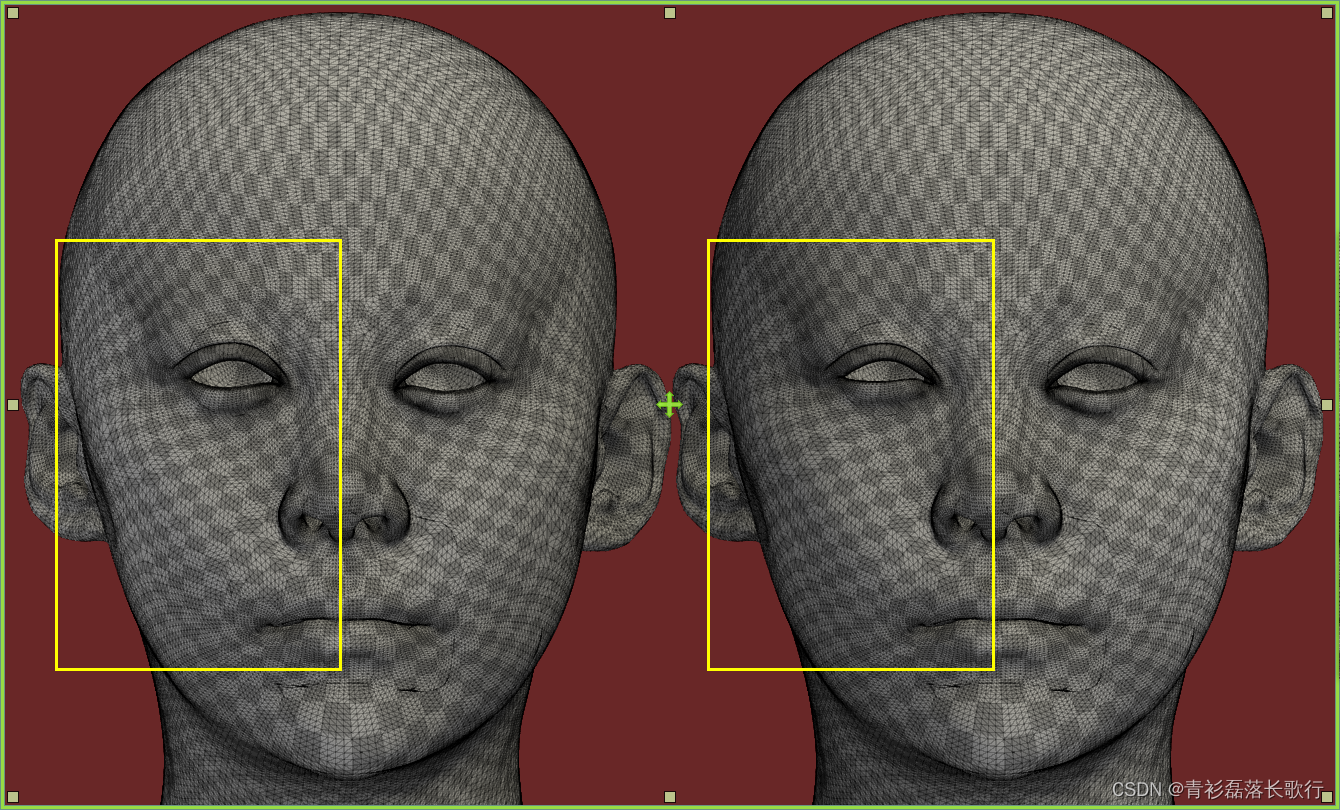 |  | 右眼睛眯起。 |
| 17 | cheekRaiserL | 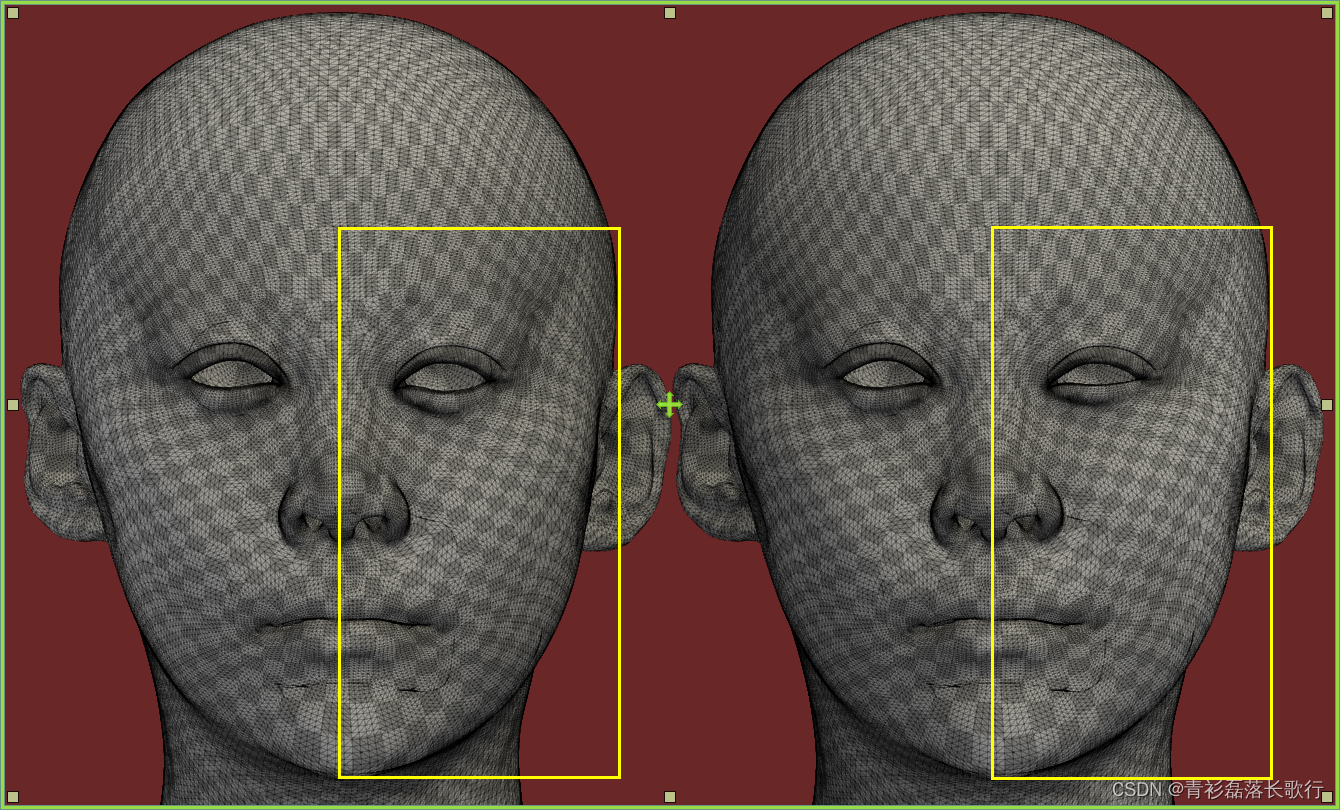 |  | 提升左脸颊。 |
| 18 | cheekRaiserR | 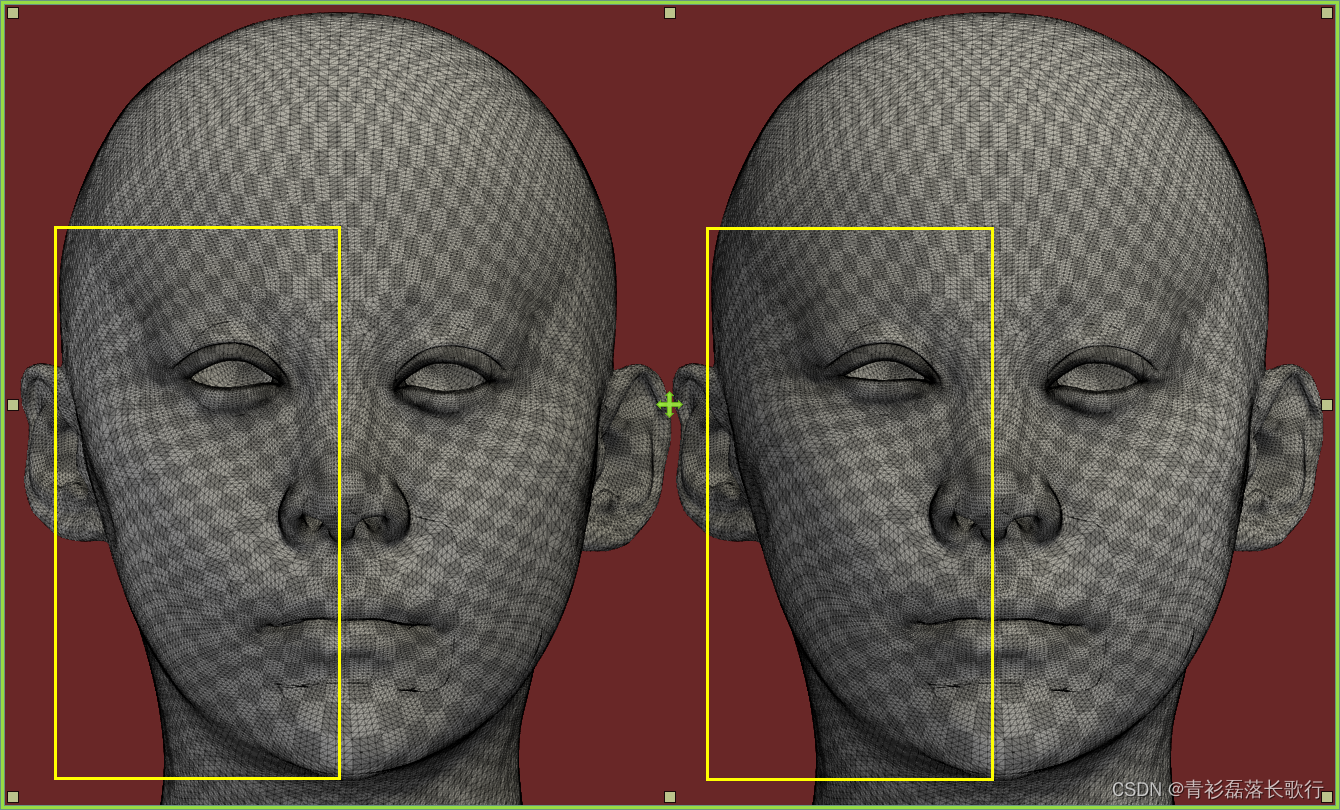 |  | 提升右脸颊。 |
| 19 | cheekPuffL |  |  | 鼓起左脸颊。 |
| 20 | cheekPuffR | 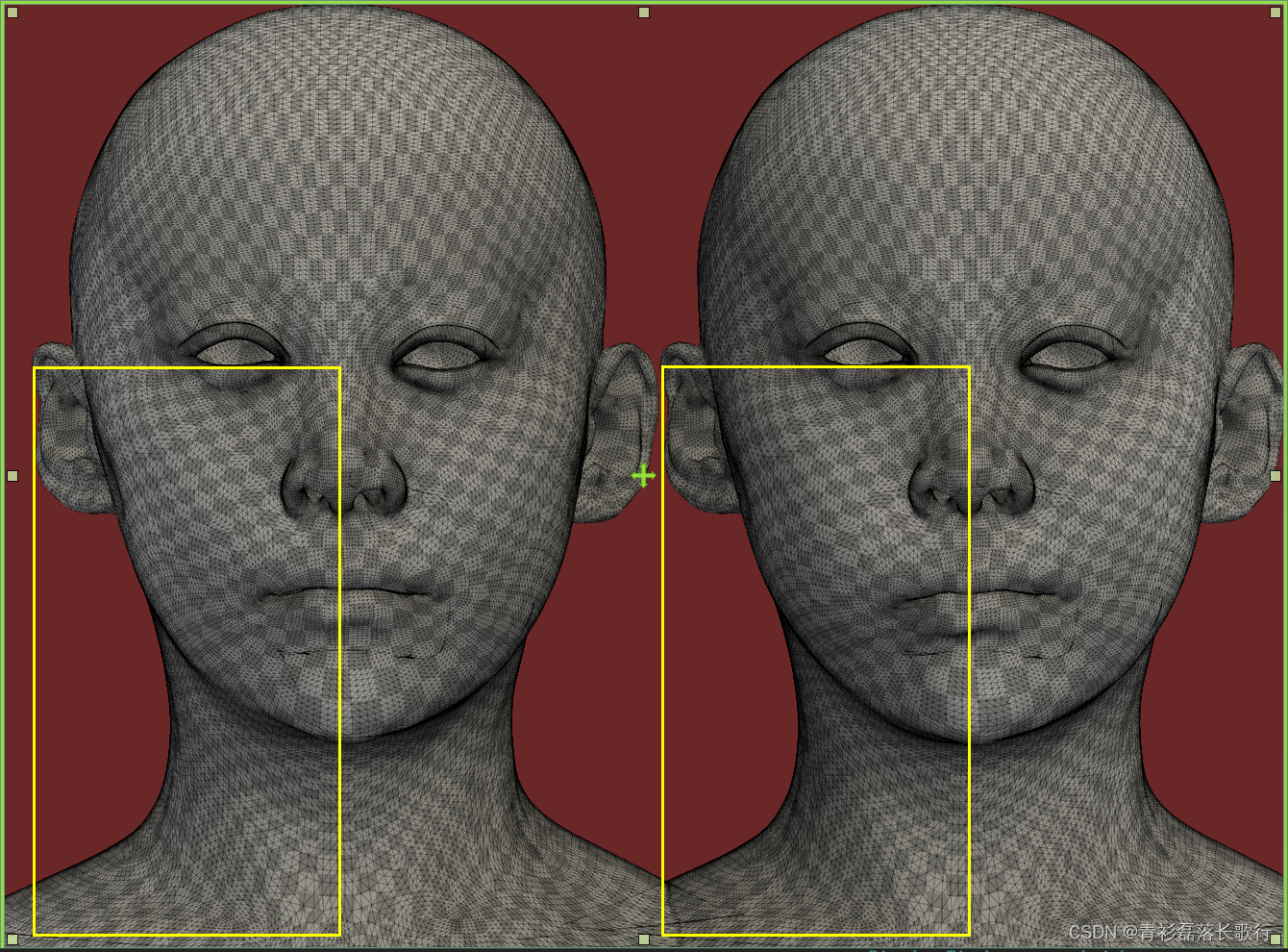 |  | 鼓起右脸颊。 |
| 21 | noseWrinklerL | 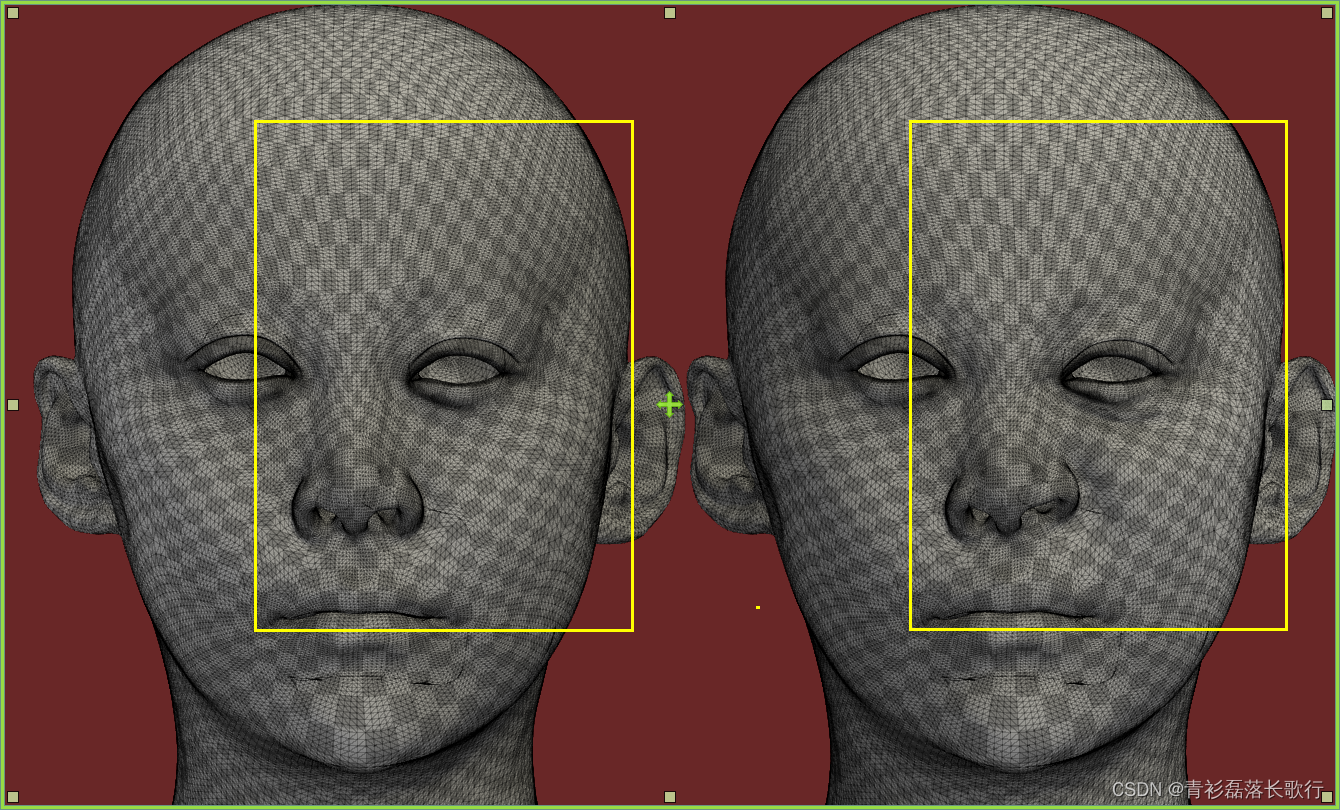 |  | 左鼻子皱纹。 |
| 22 | noseWrinklerR | 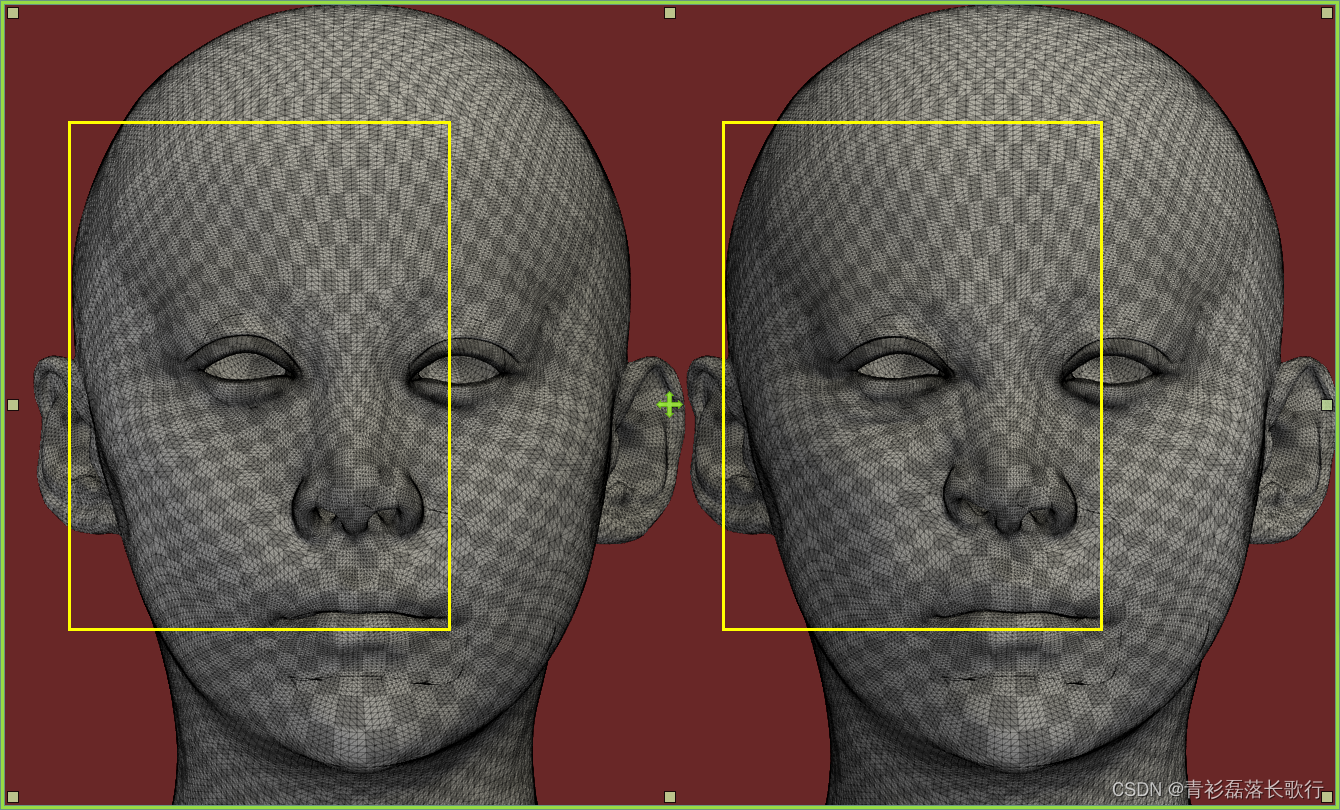 |  | 右鼻子皱纹。 |
| 23 | jawDrop | 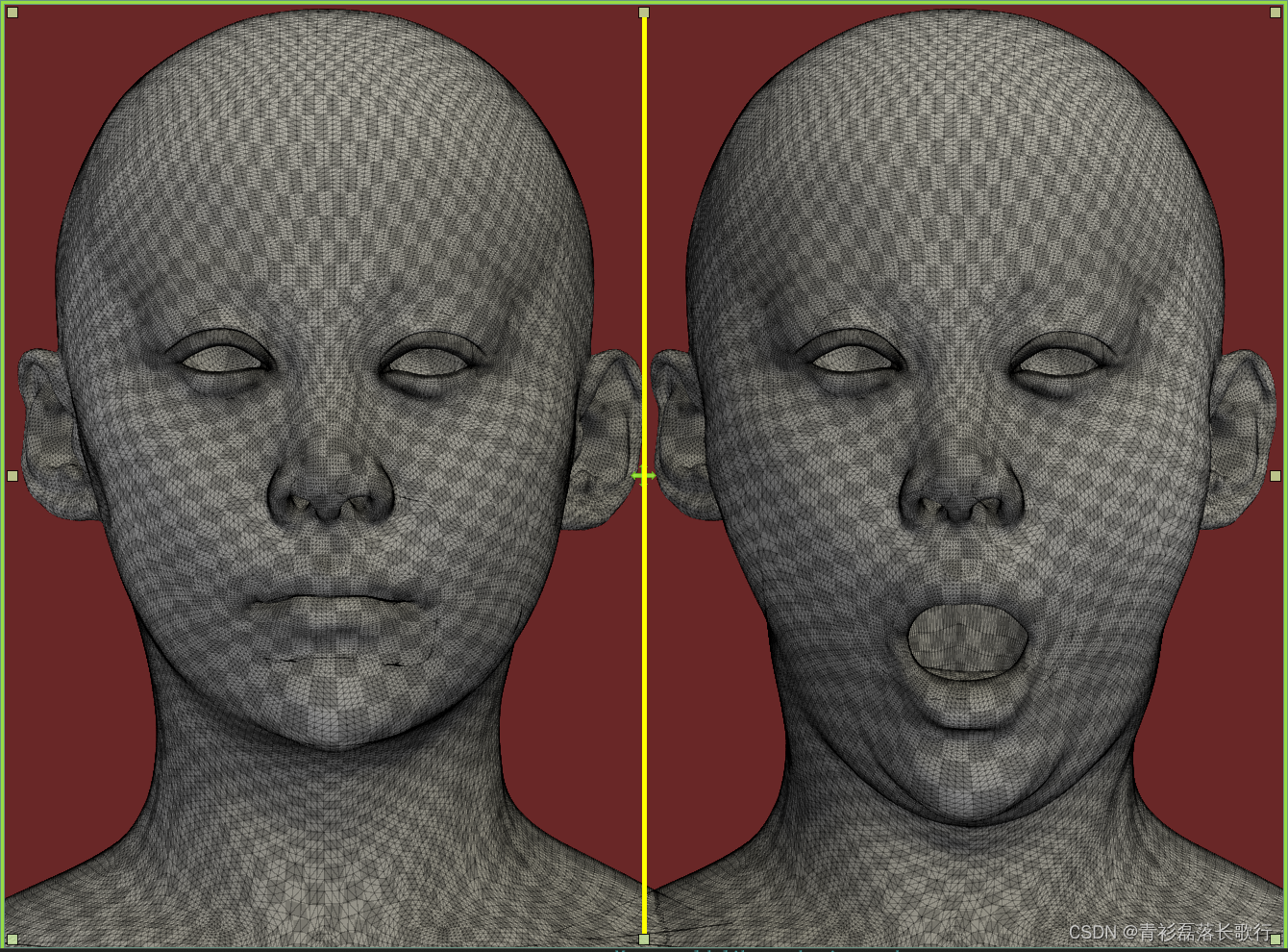 |  | 下巴下垂。 |
| 24 | jawDropLipTowards |  |  | 下巴下垂并向嘴唇方向移动。 |
| 25 | jawThrust |  |  | 向前推下巴。 |
| 26 | jawSlideLeft | 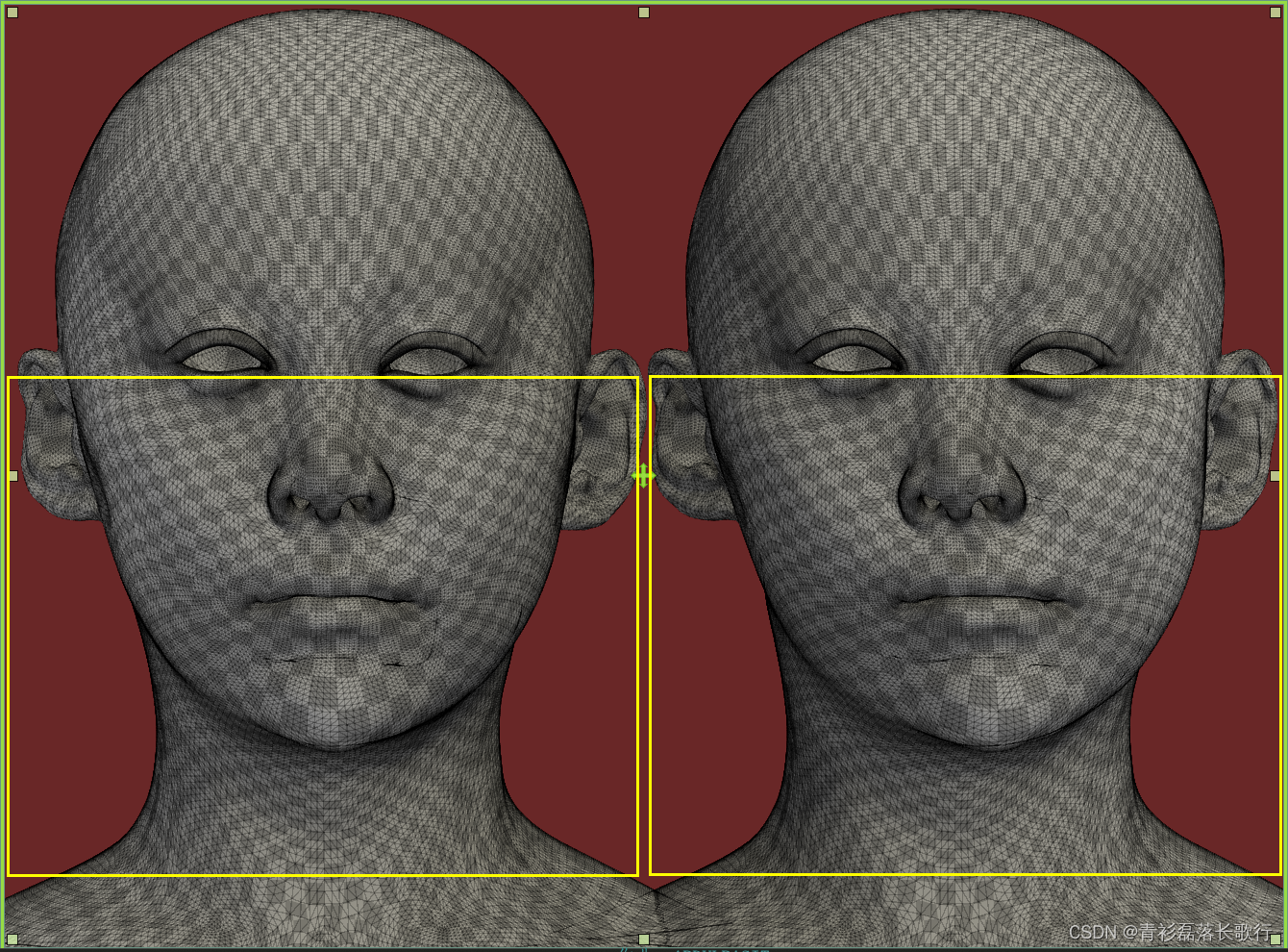 |  | 下巴向左滑动。 |
| 27 | jawSlideRight | 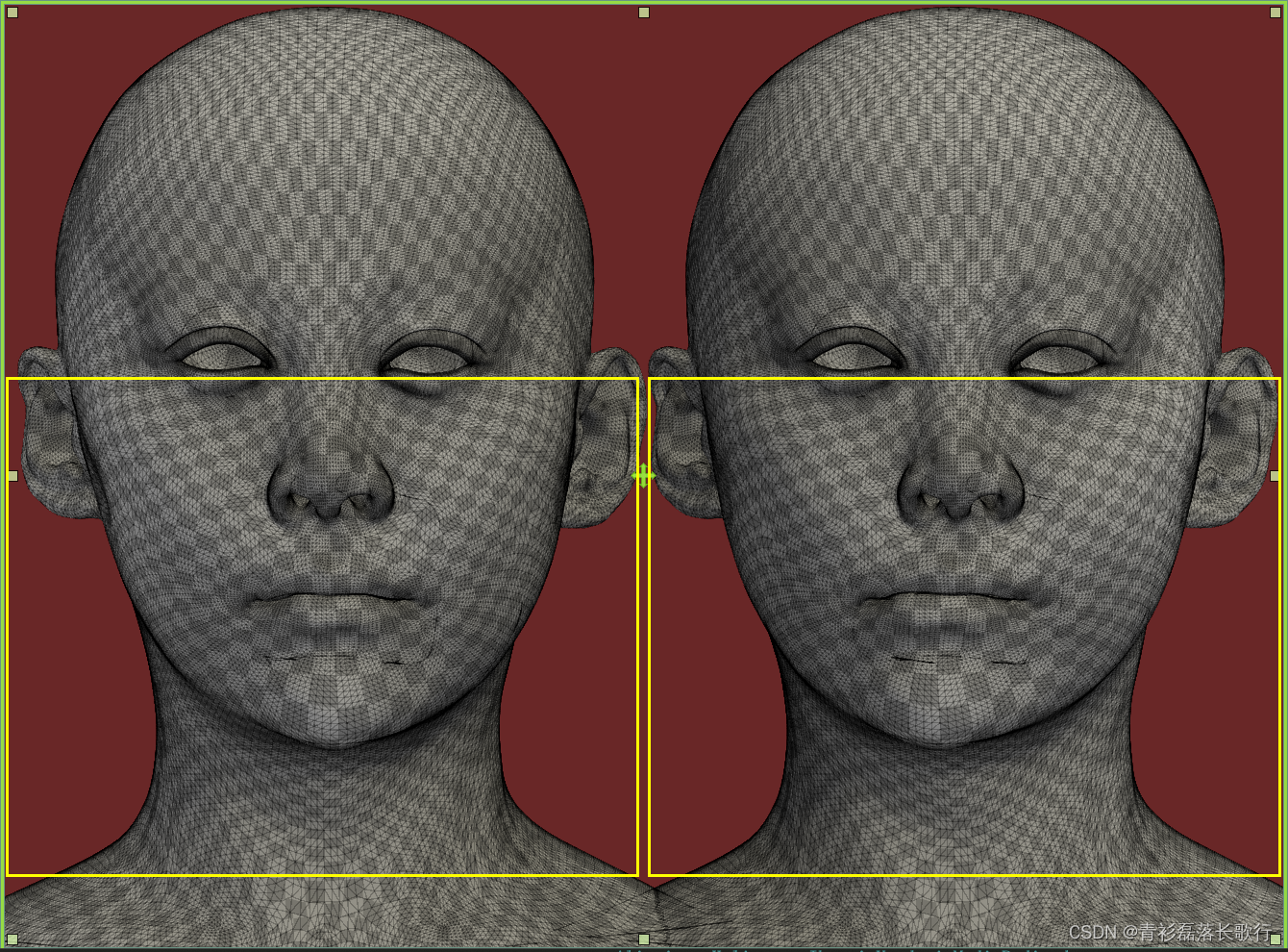 |  | 下巴向右滑动。 |
| 28 | mouthSlideLeft | 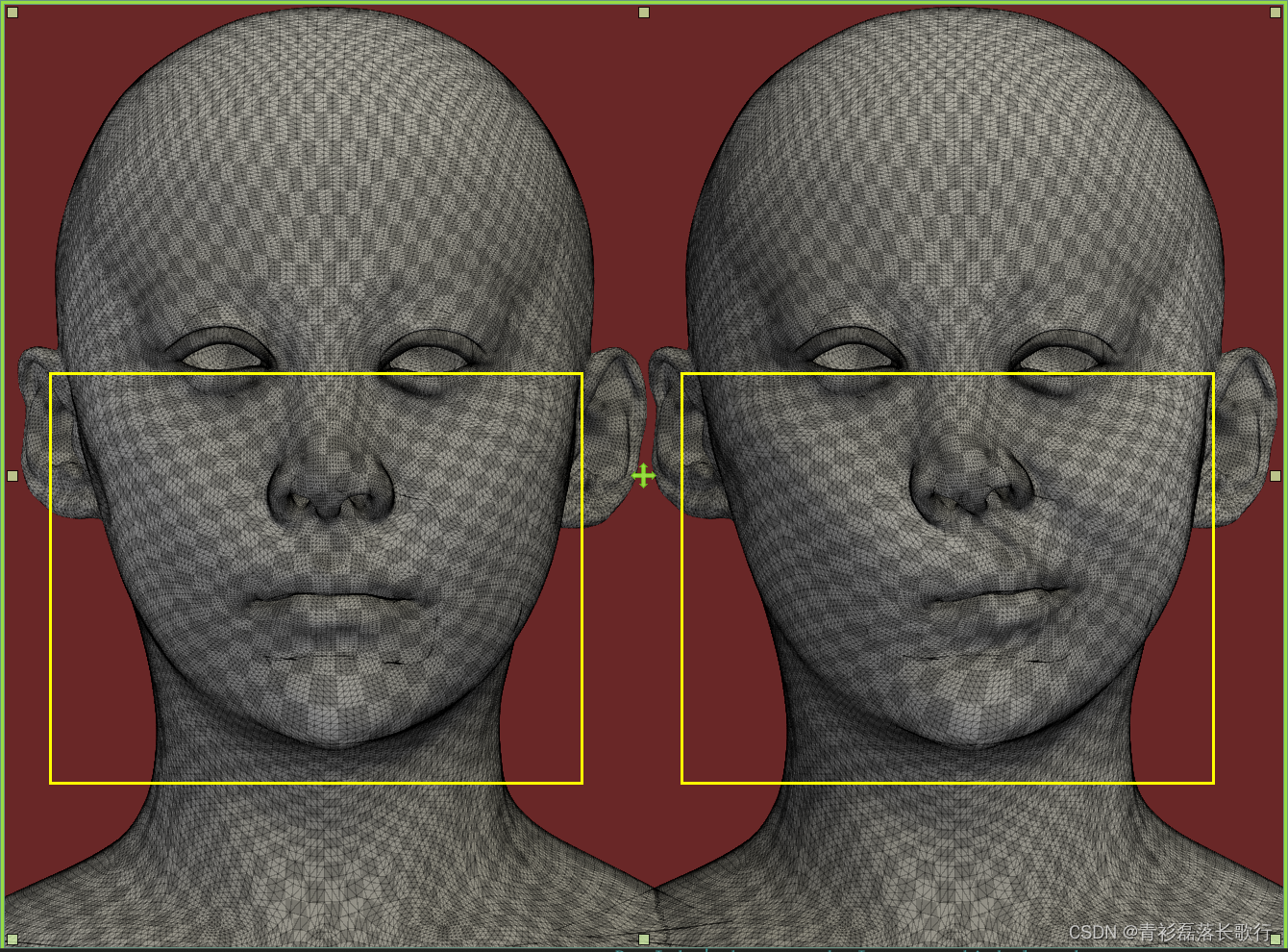 |  | 嘴巴向左滑动。 |
| 29 | mouthSlideRight | 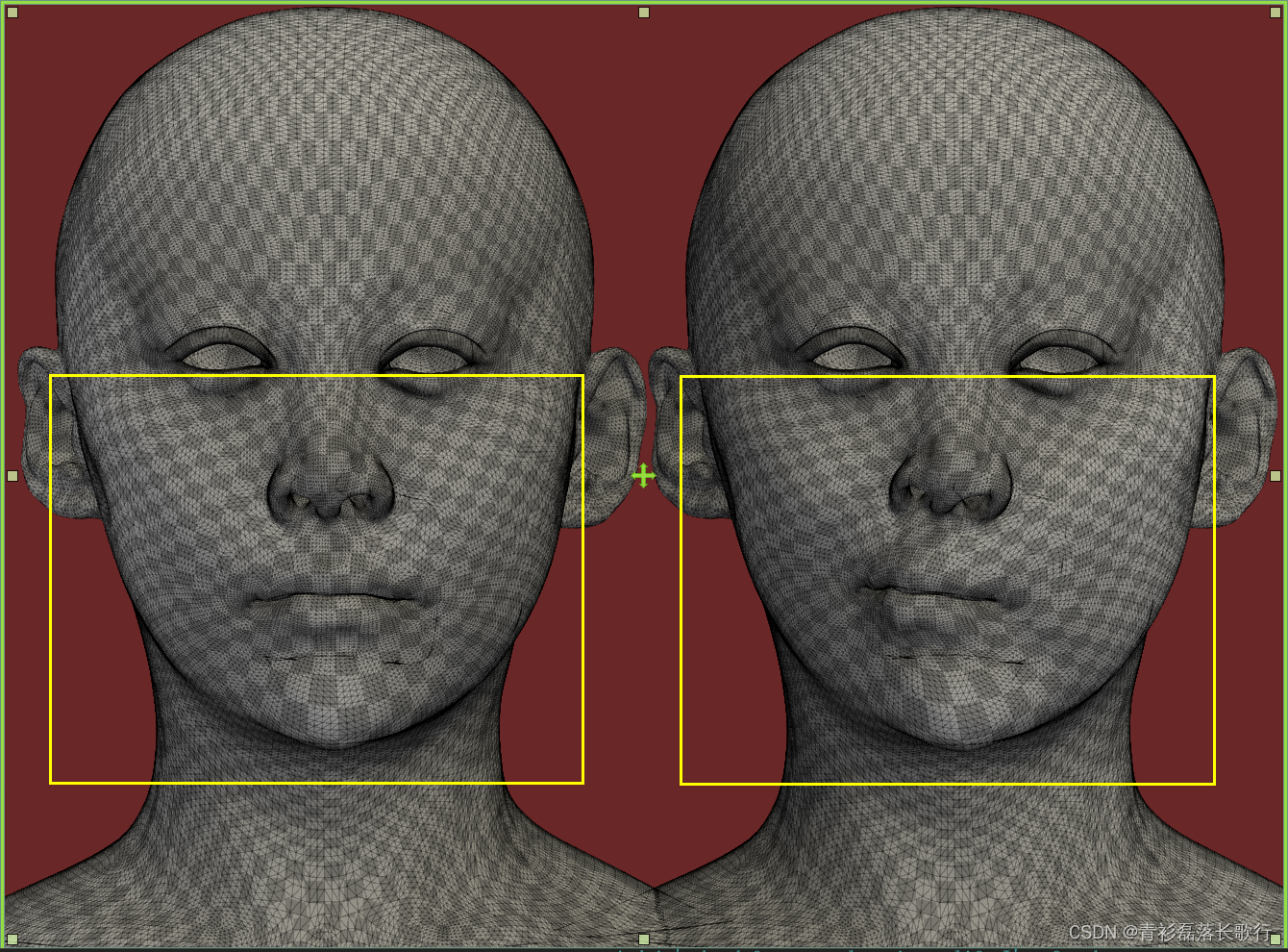 |  | 嘴巴向右滑动。 |
| 30 | dimplerL | 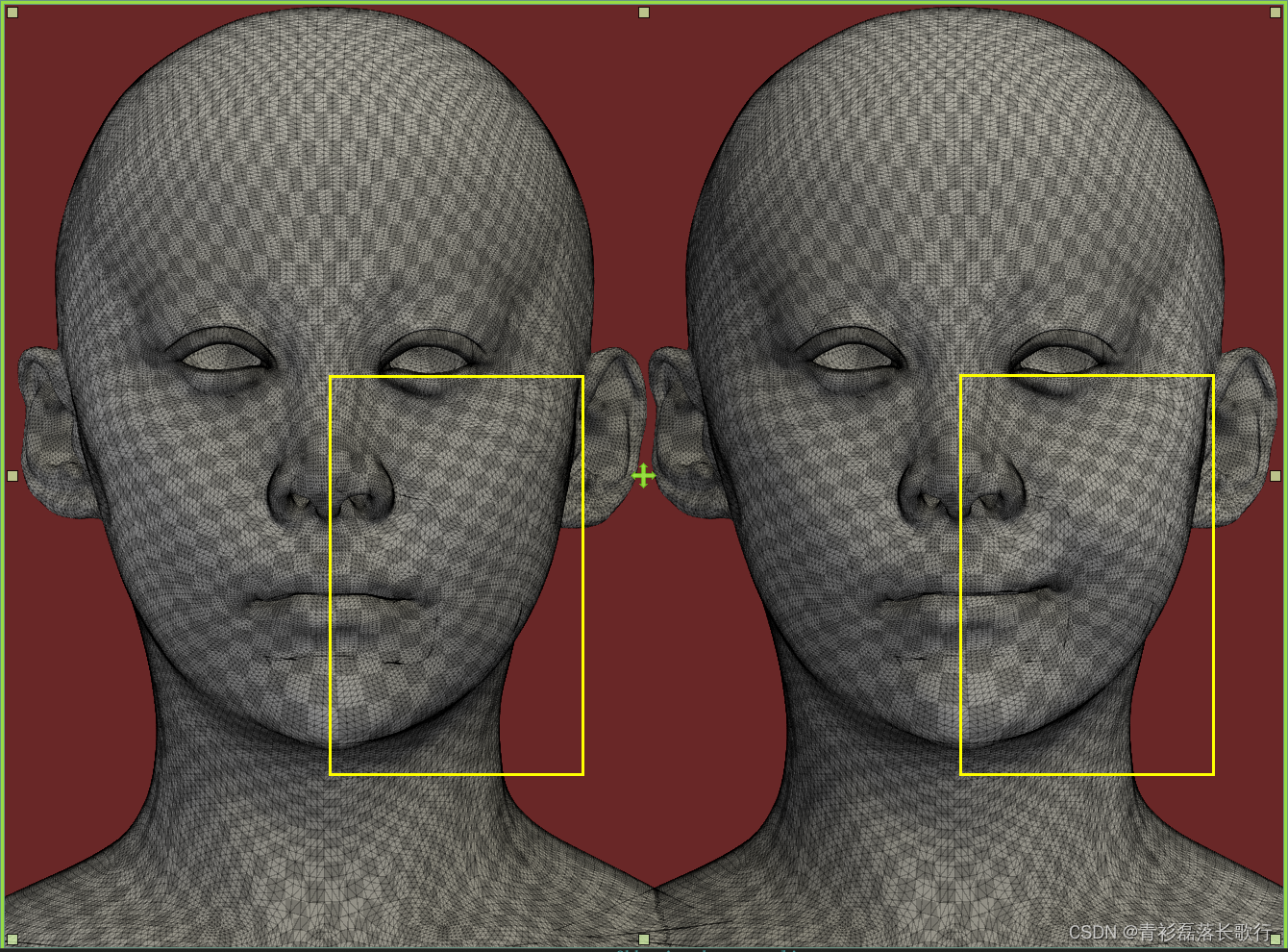 |  | 左酒窝。 |
| 31 | dimplerR | 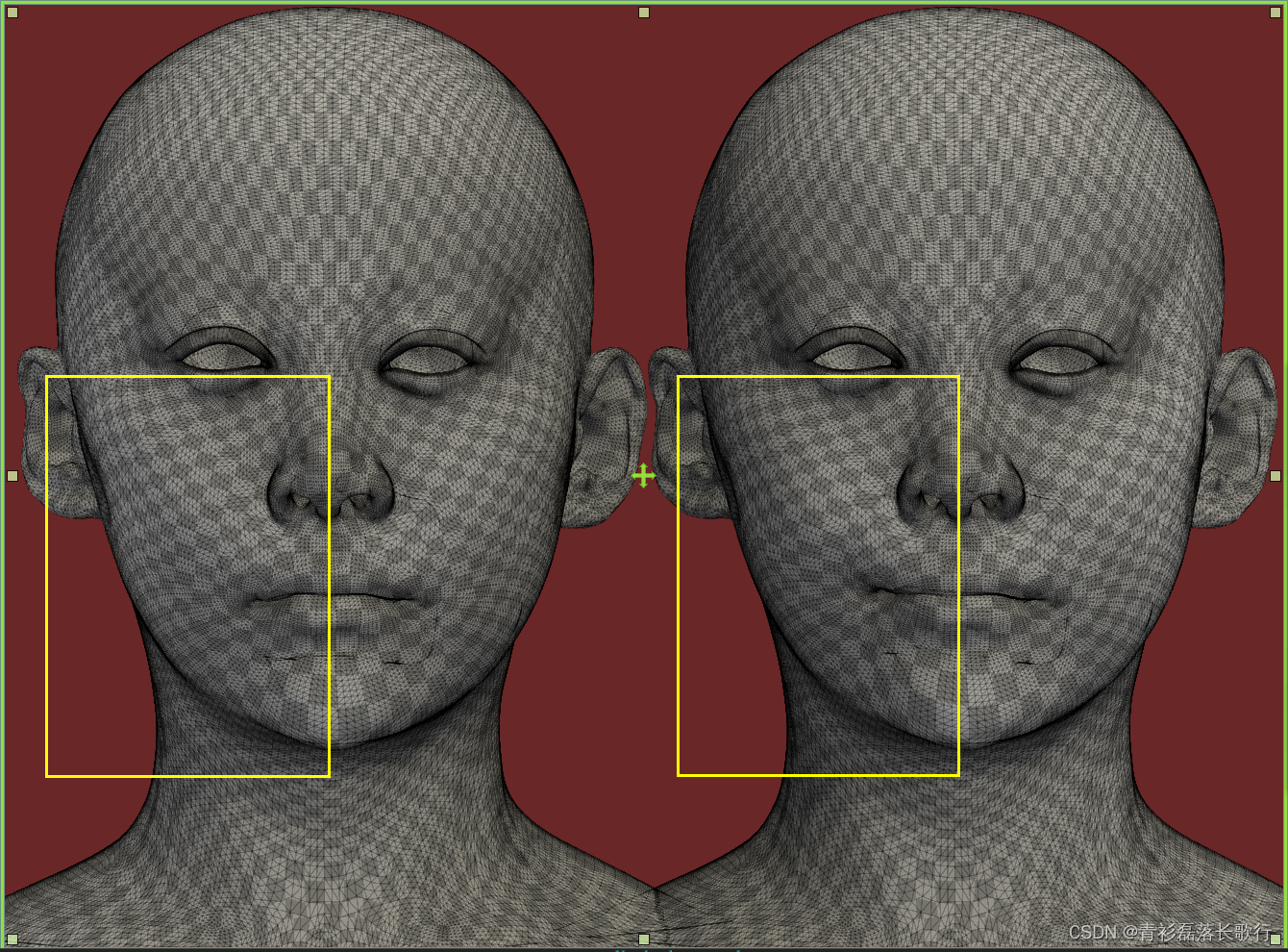 |  | 右酒窝。 |
| 32 | lipCornerPullerL | 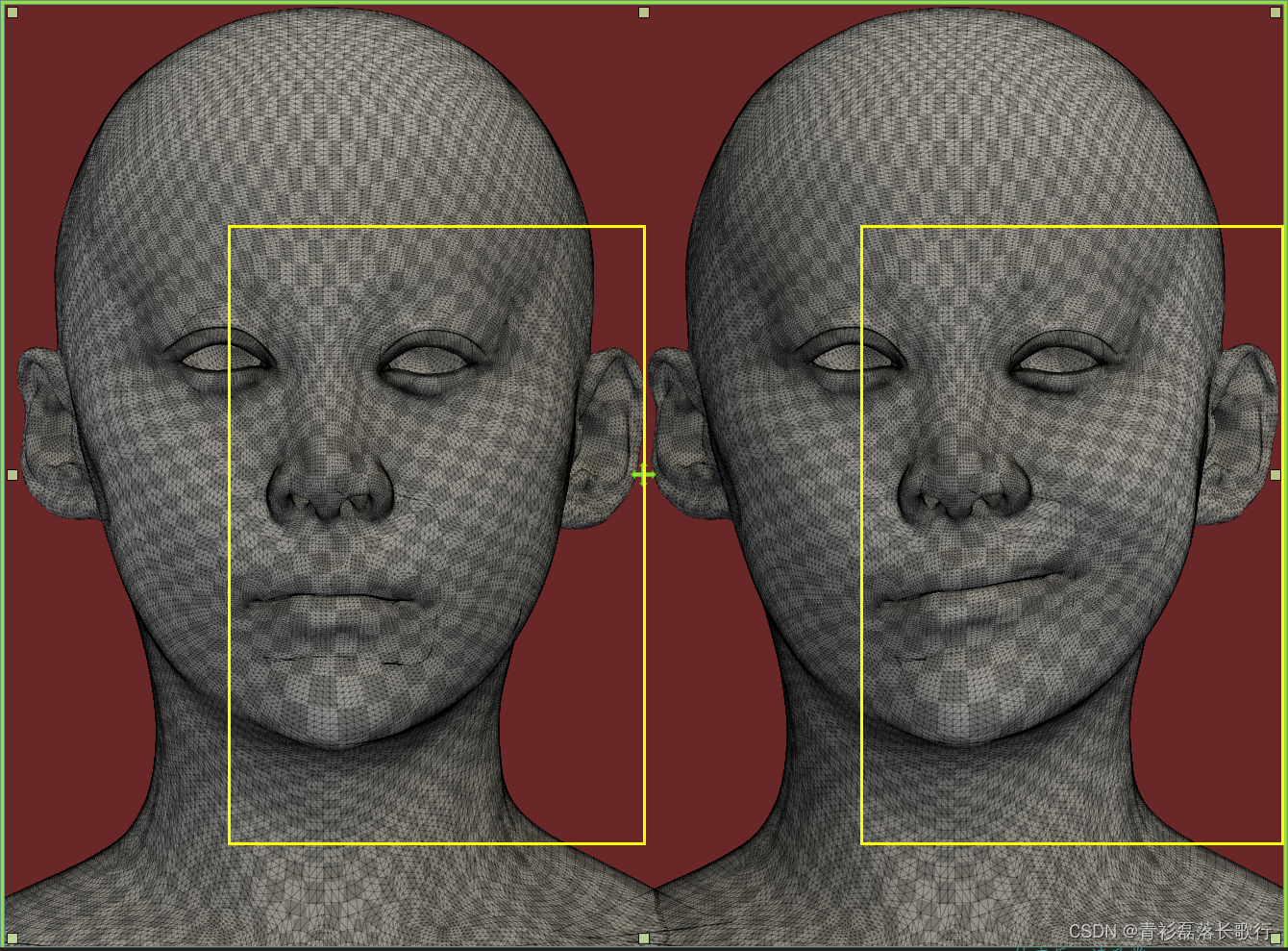 |  | 拉向左嘴角。 |
| 33 | lipCornerPullerR | 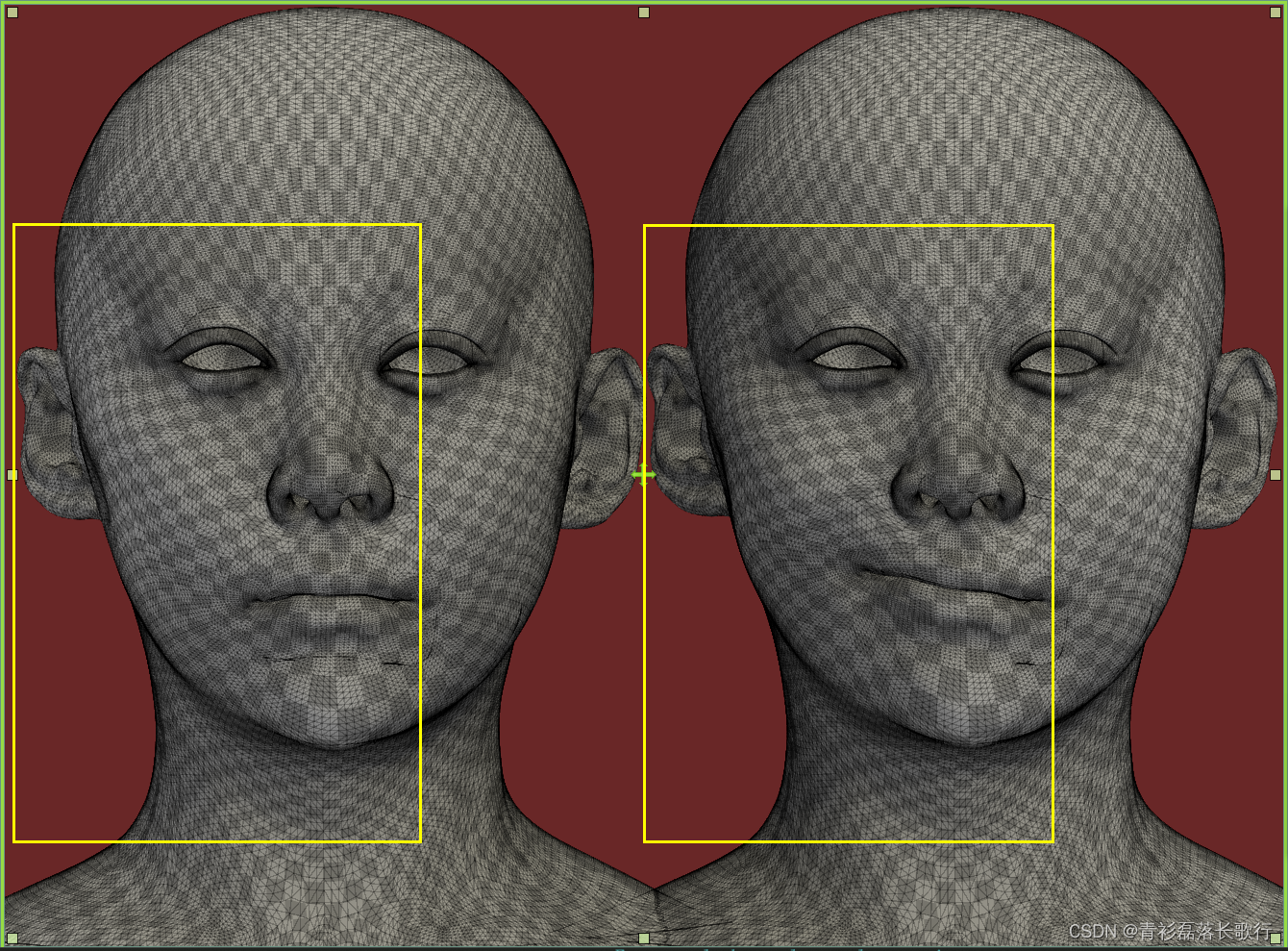 |  | 拉向右嘴角。 |
| 34 | lipCornerDepressorL | 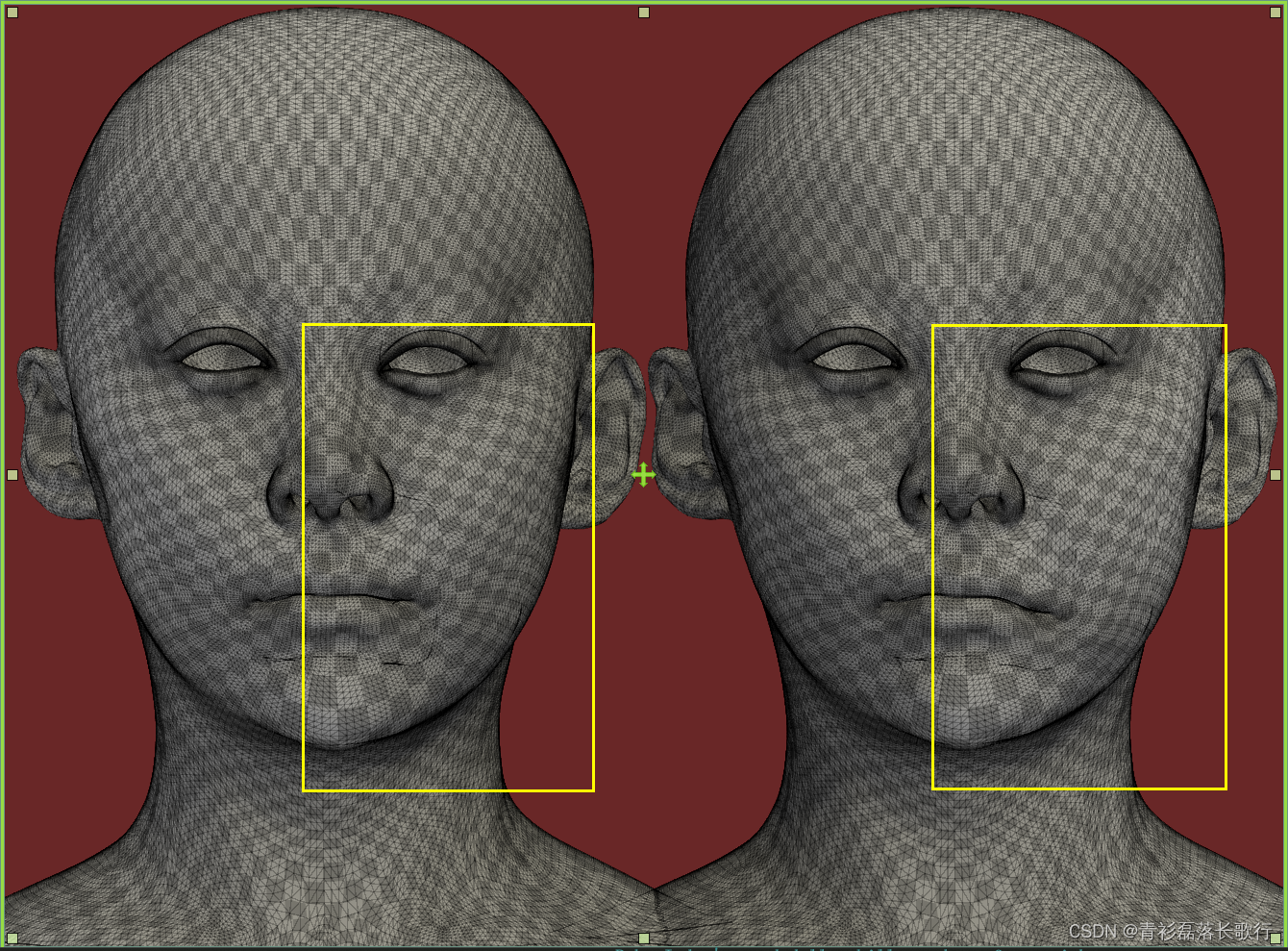 |  | 下压左嘴角。 |
| 35 | lipCornerDepressorR | 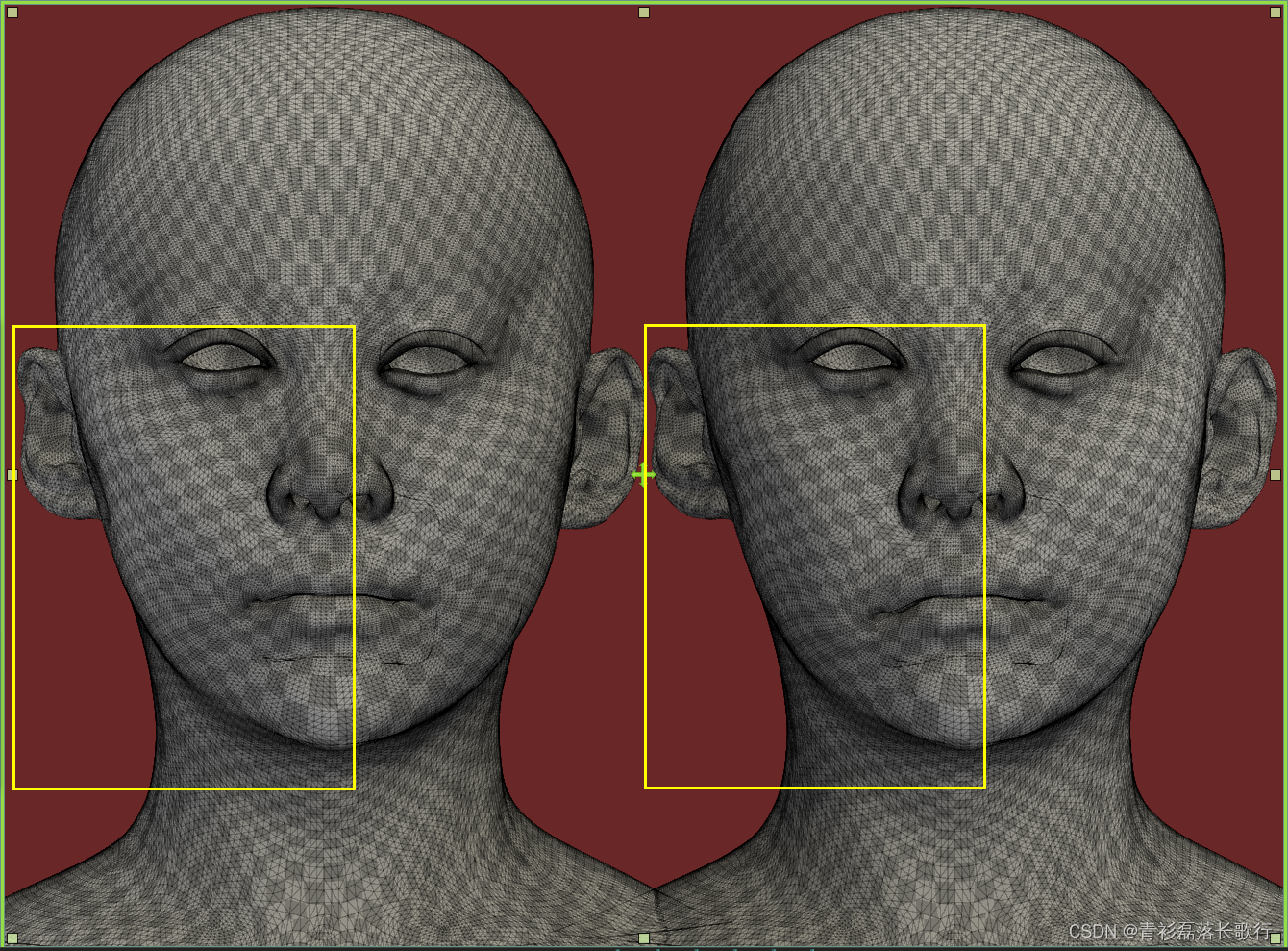 |  | 下压右嘴角。 |
| 36 | lipStretcherL |  |  | 拉伸左嘴角。 |
| 37 | lipStretcherR | 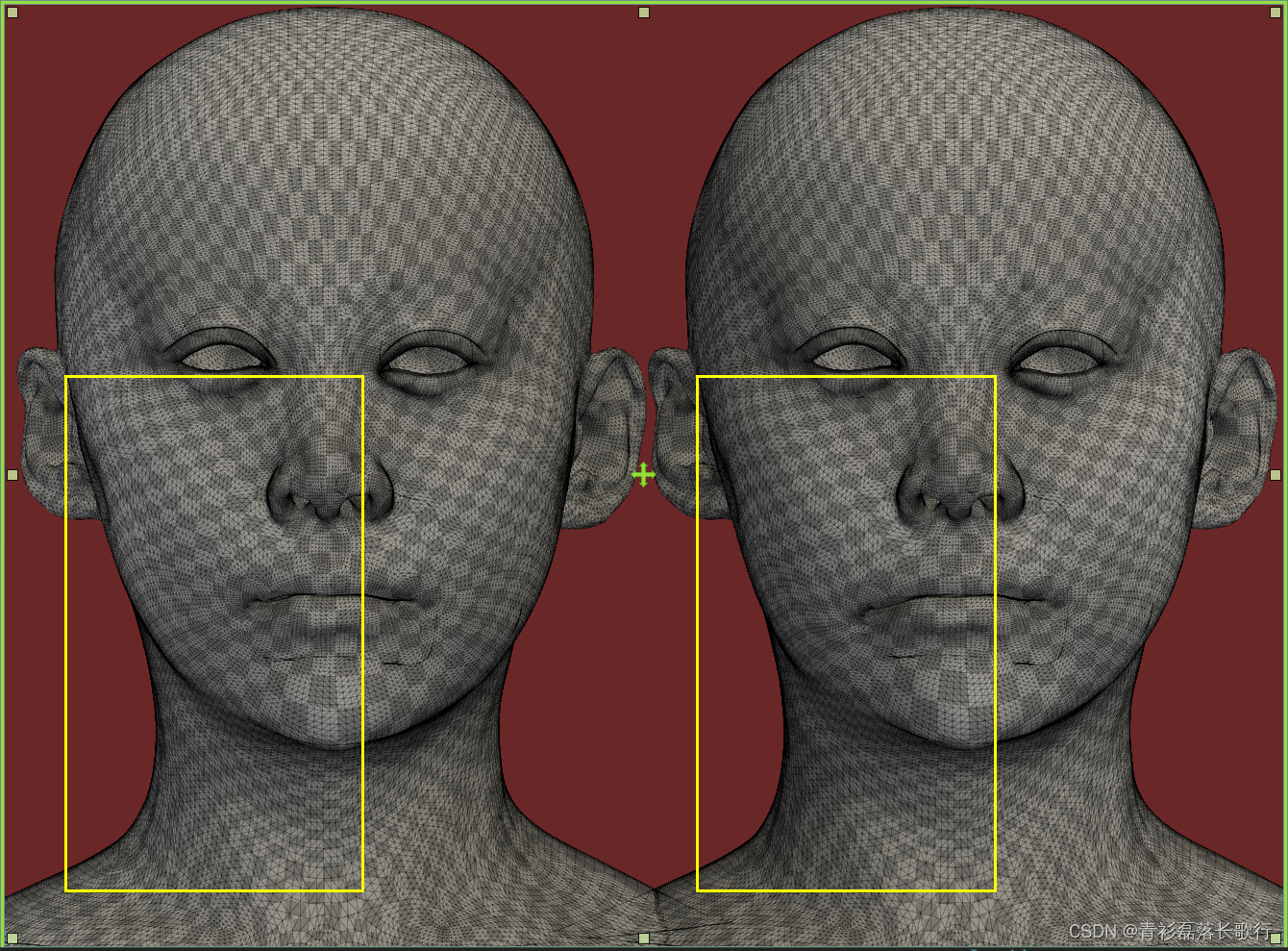 |  | 拉伸右嘴角。 |
| 38 | upperLipRaiserL | 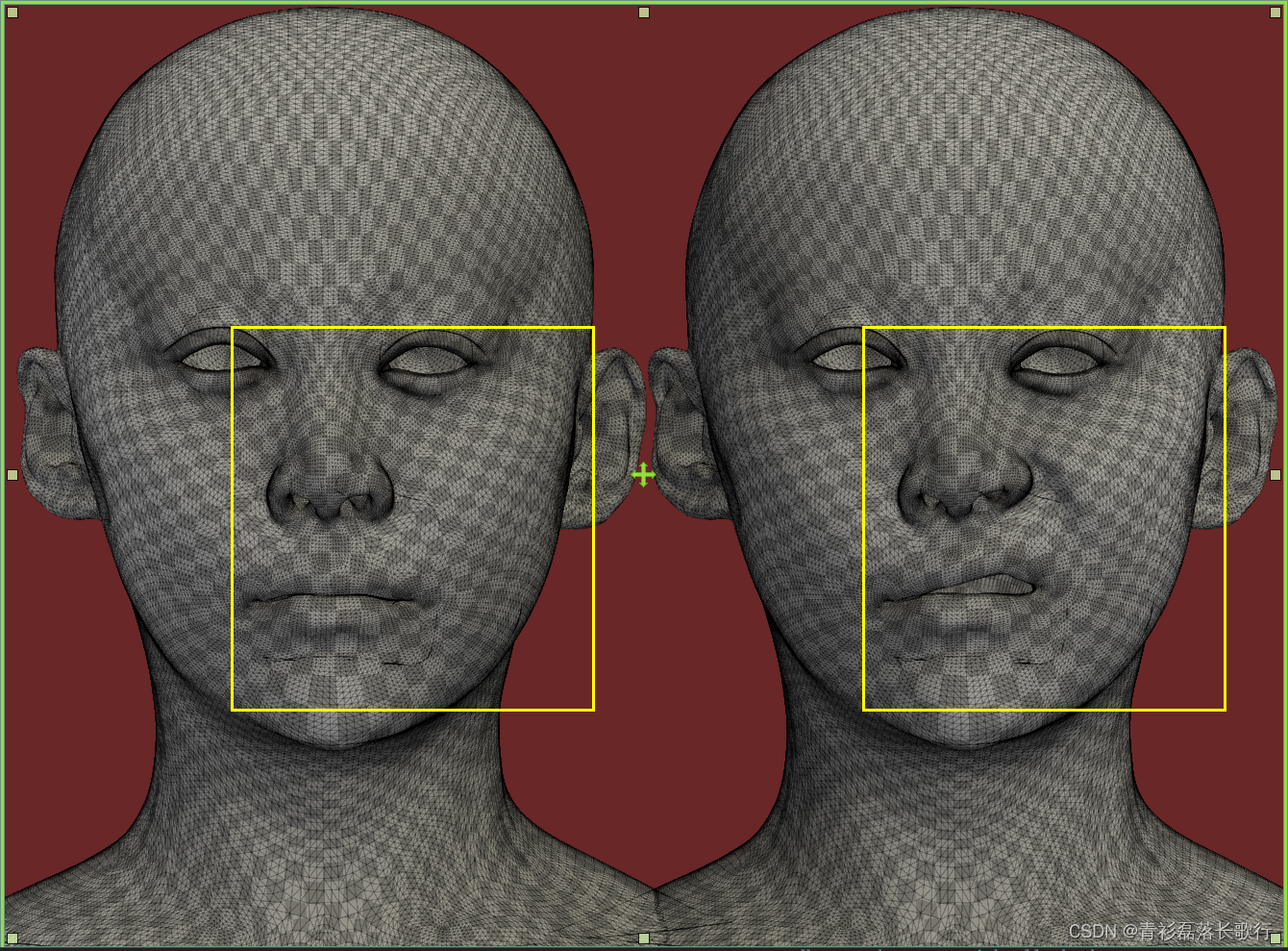 |  | 提升左上嘴唇。 |
| 39 | upperLipRaiserR | 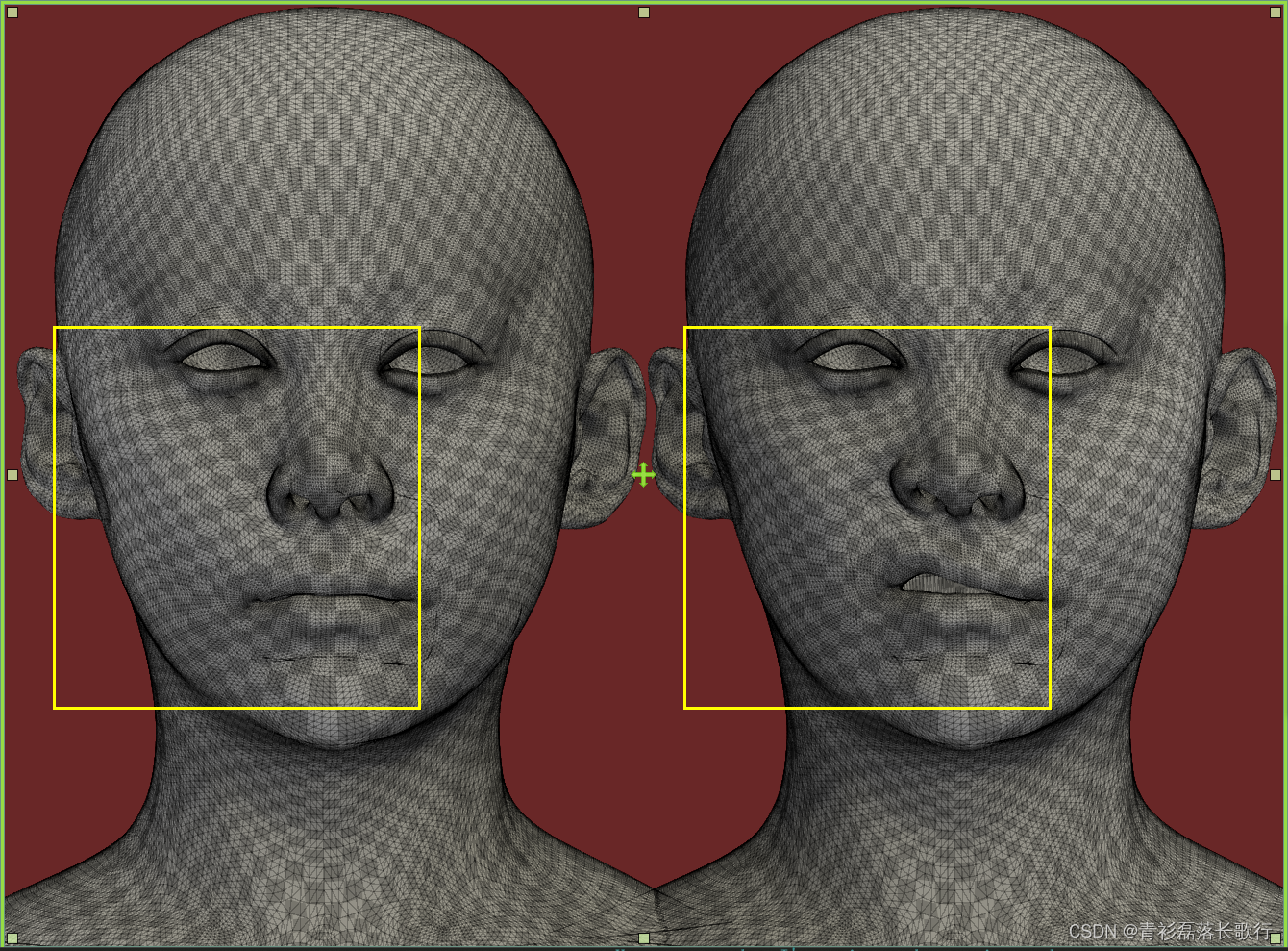 |  | 提升右上嘴唇。 |
| 40 | lowerLipDepressorL | 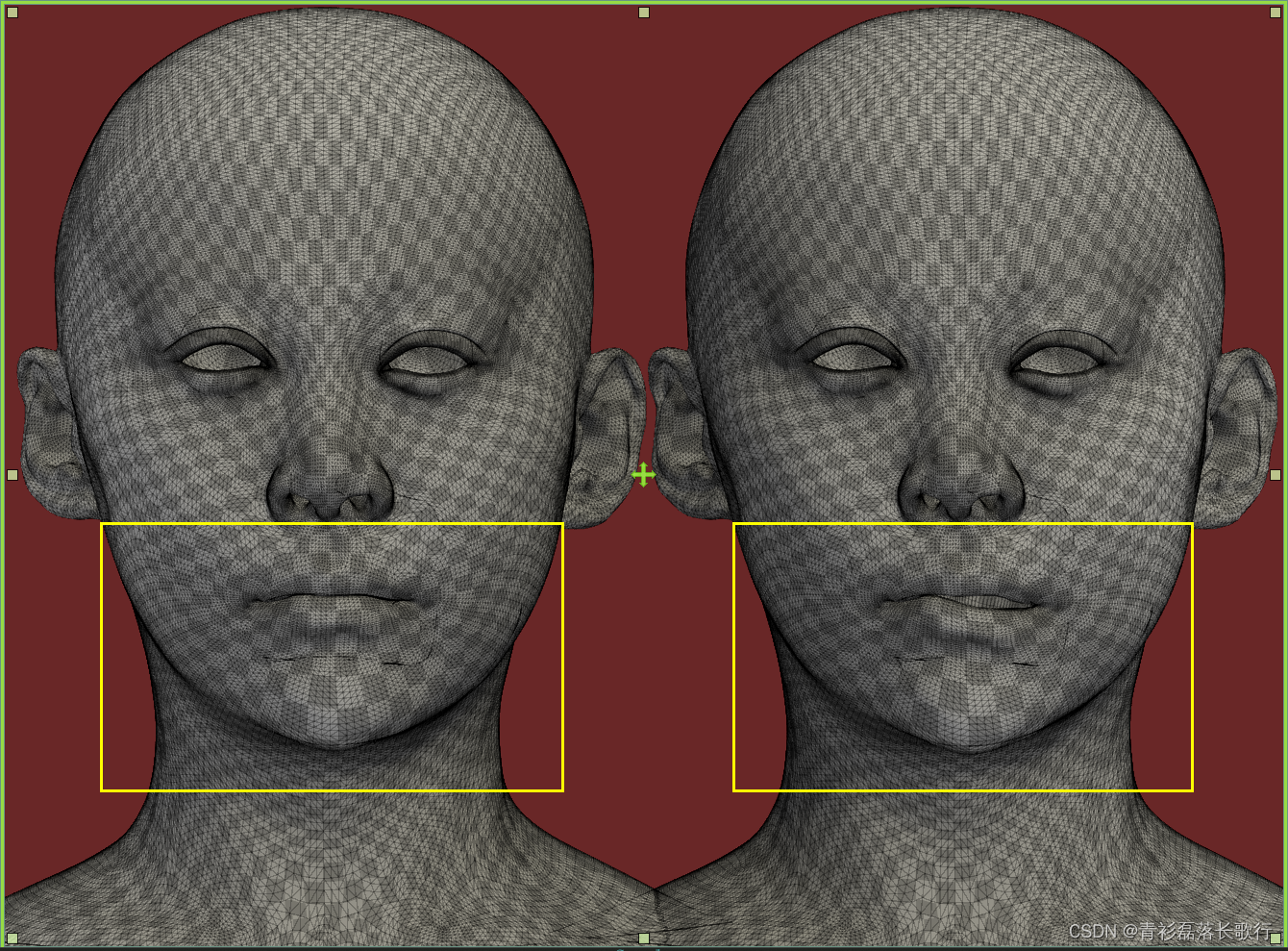 |  | 下压左下嘴唇。 |
| 41 | lowerLipDepressorR | 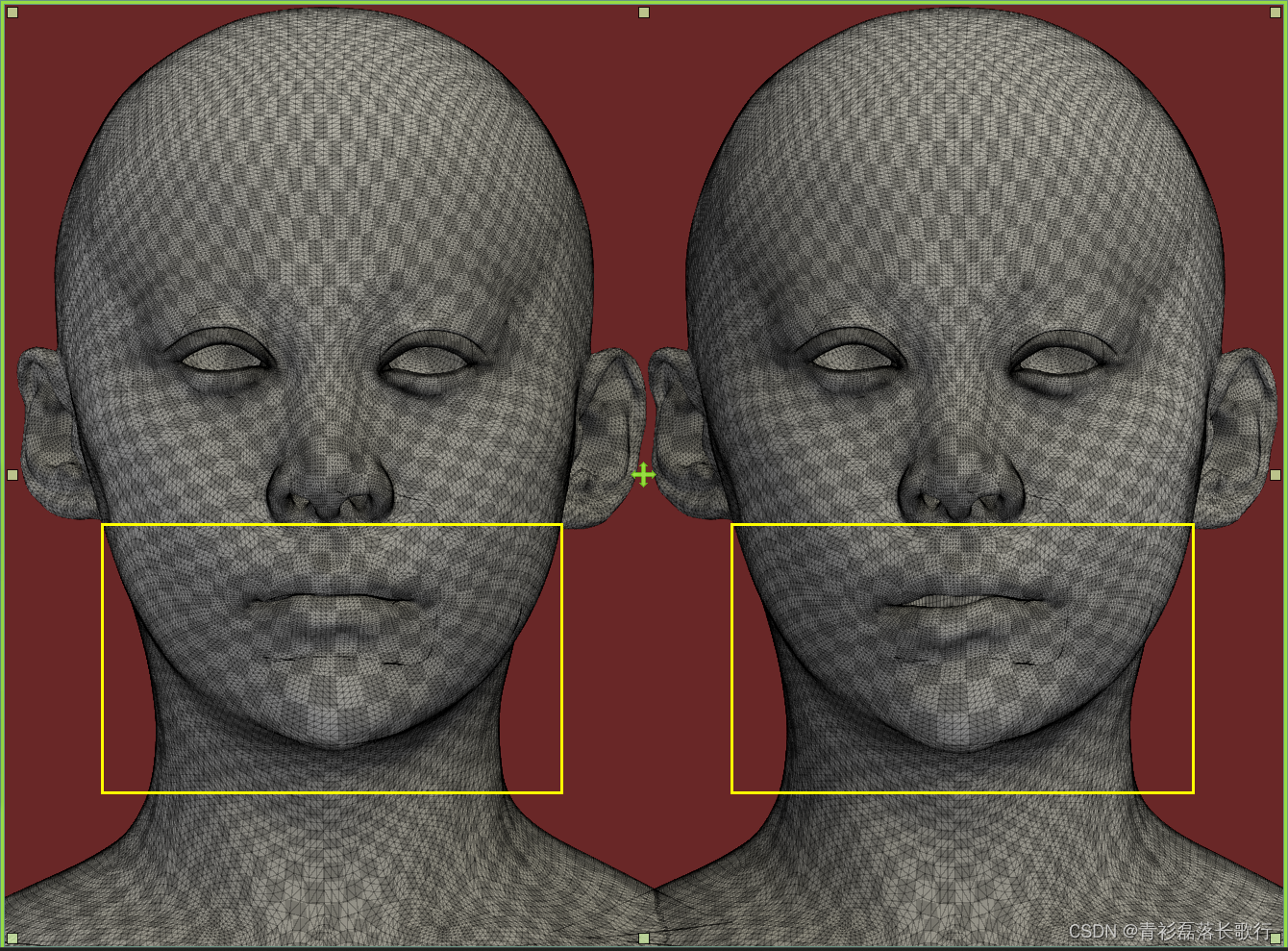 |  | 下压右下嘴唇。 |
| 42 | chinRaiser | 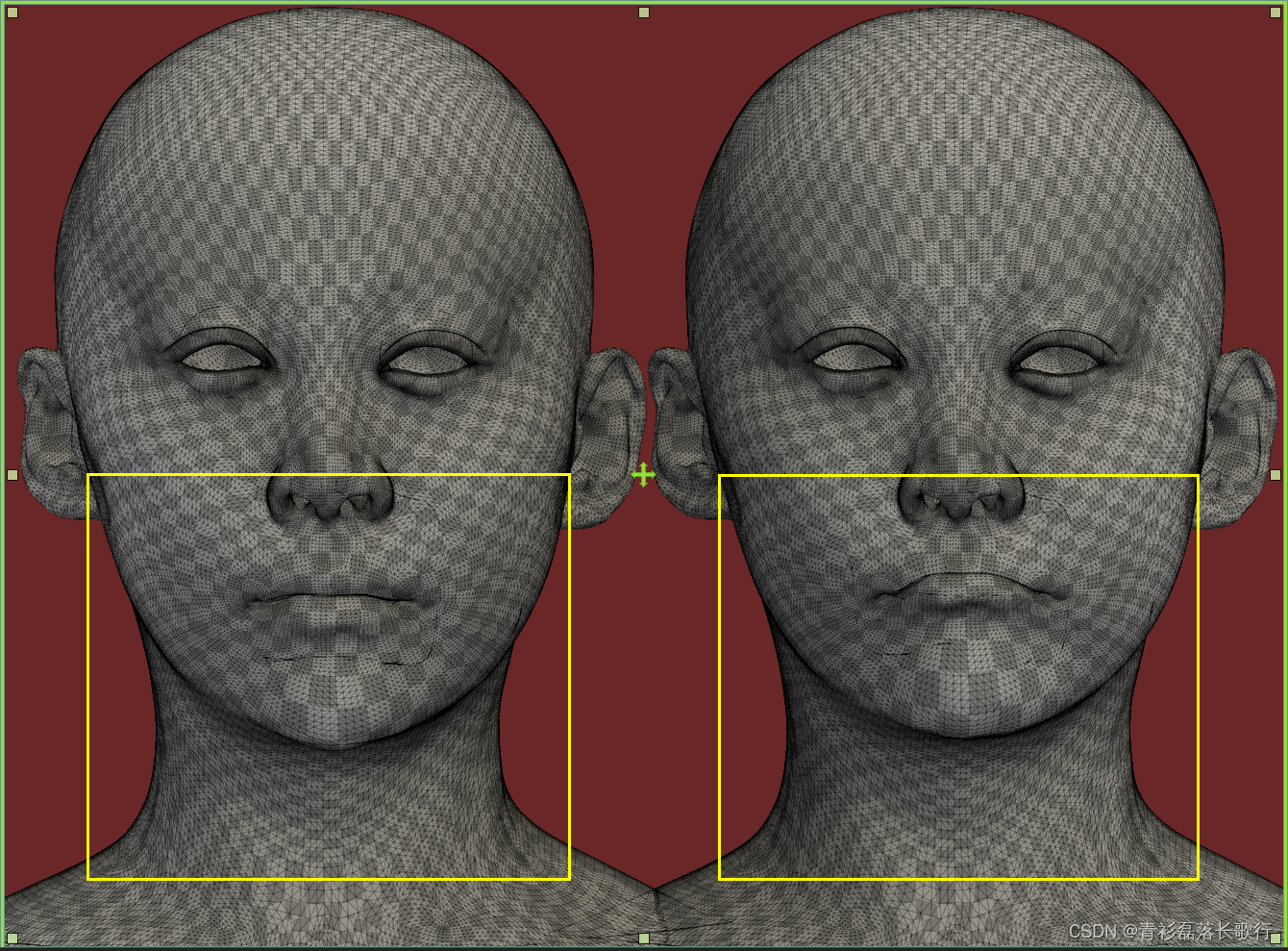 |  | 提升下巴。 |
| 43 | lipPressor | 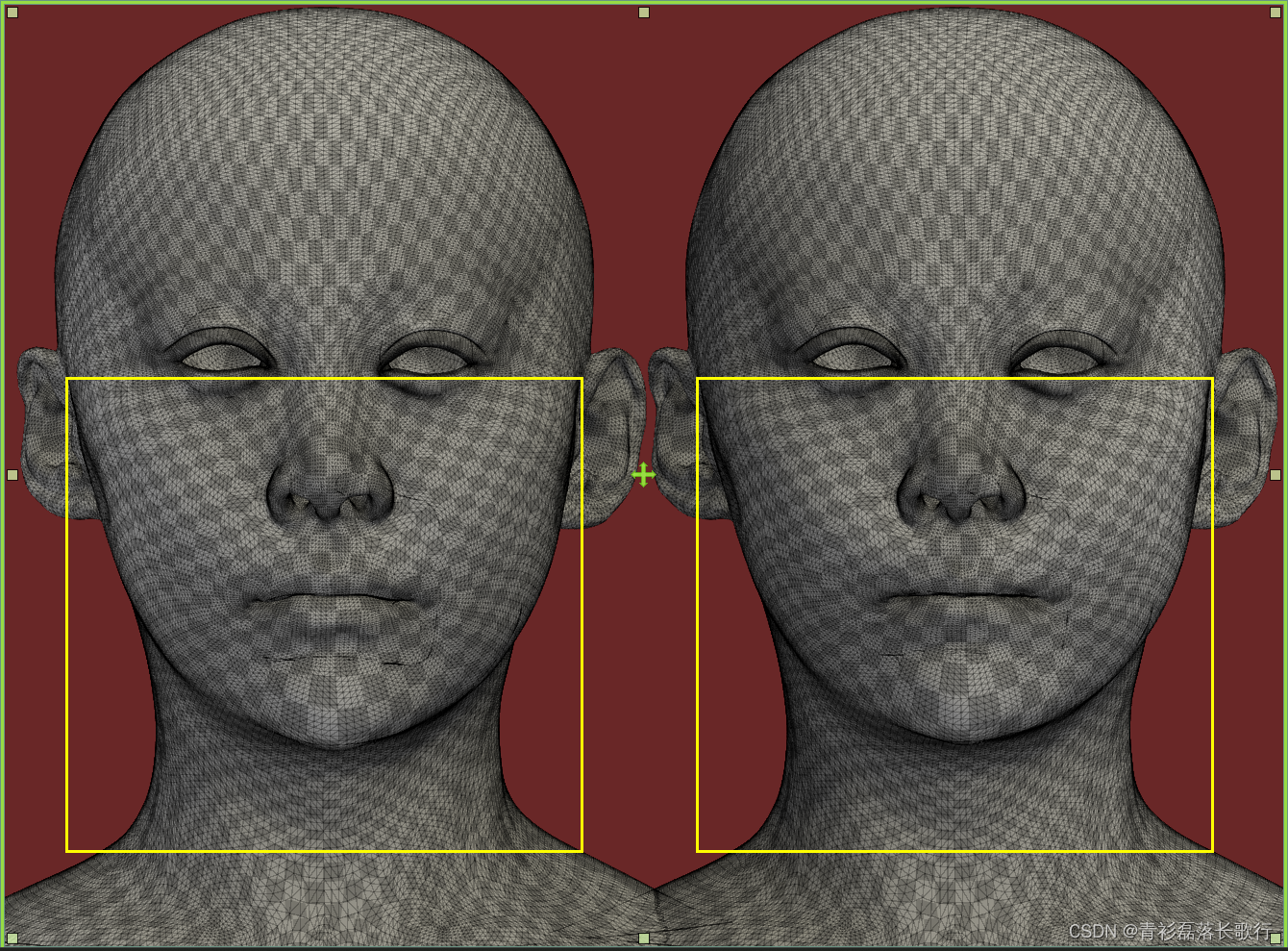 |  | 压缩嘴唇。 |
| 44 | pucker | 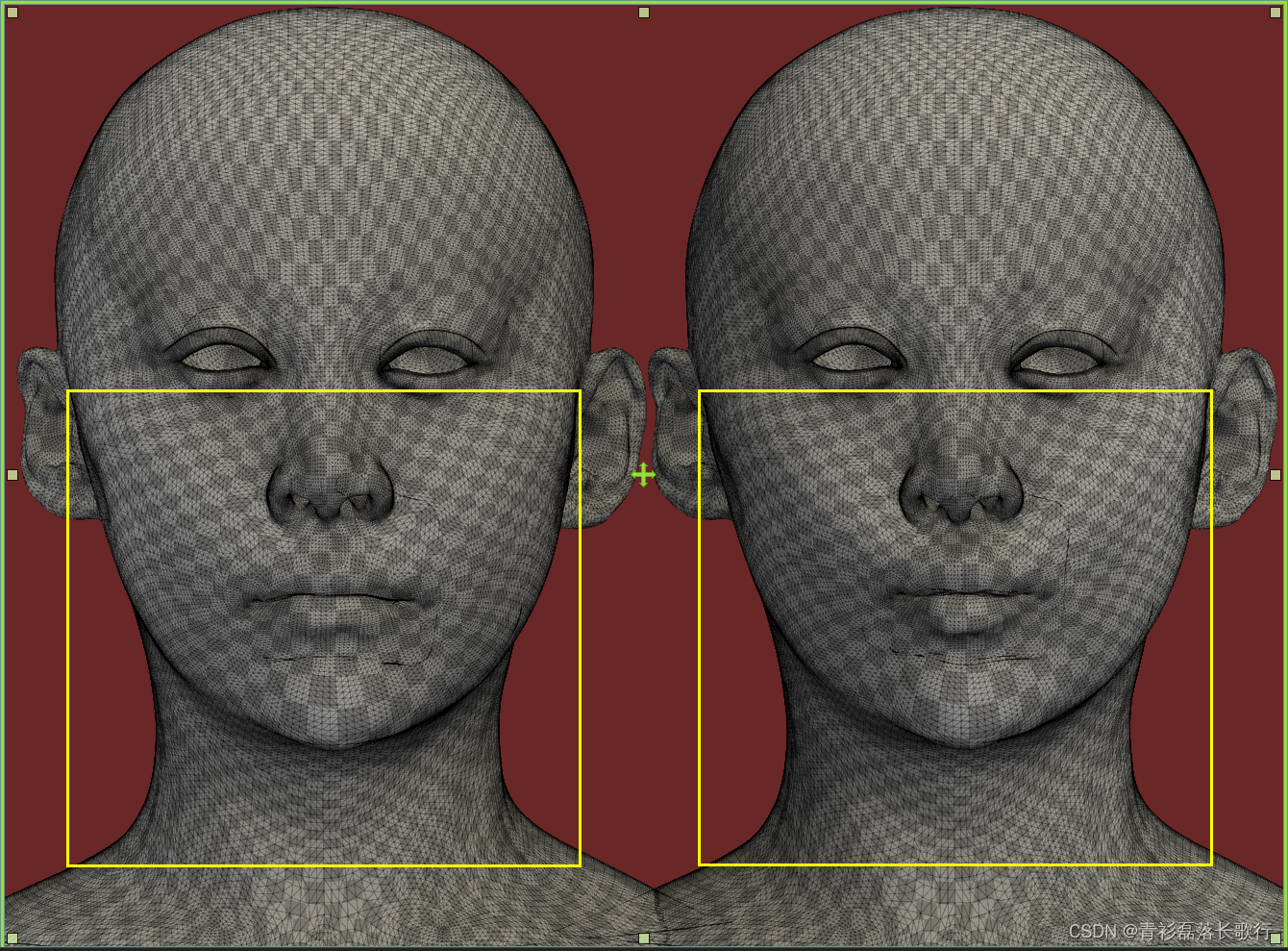 |  | 嘴唇撅起。 |
| 45 | funneler | 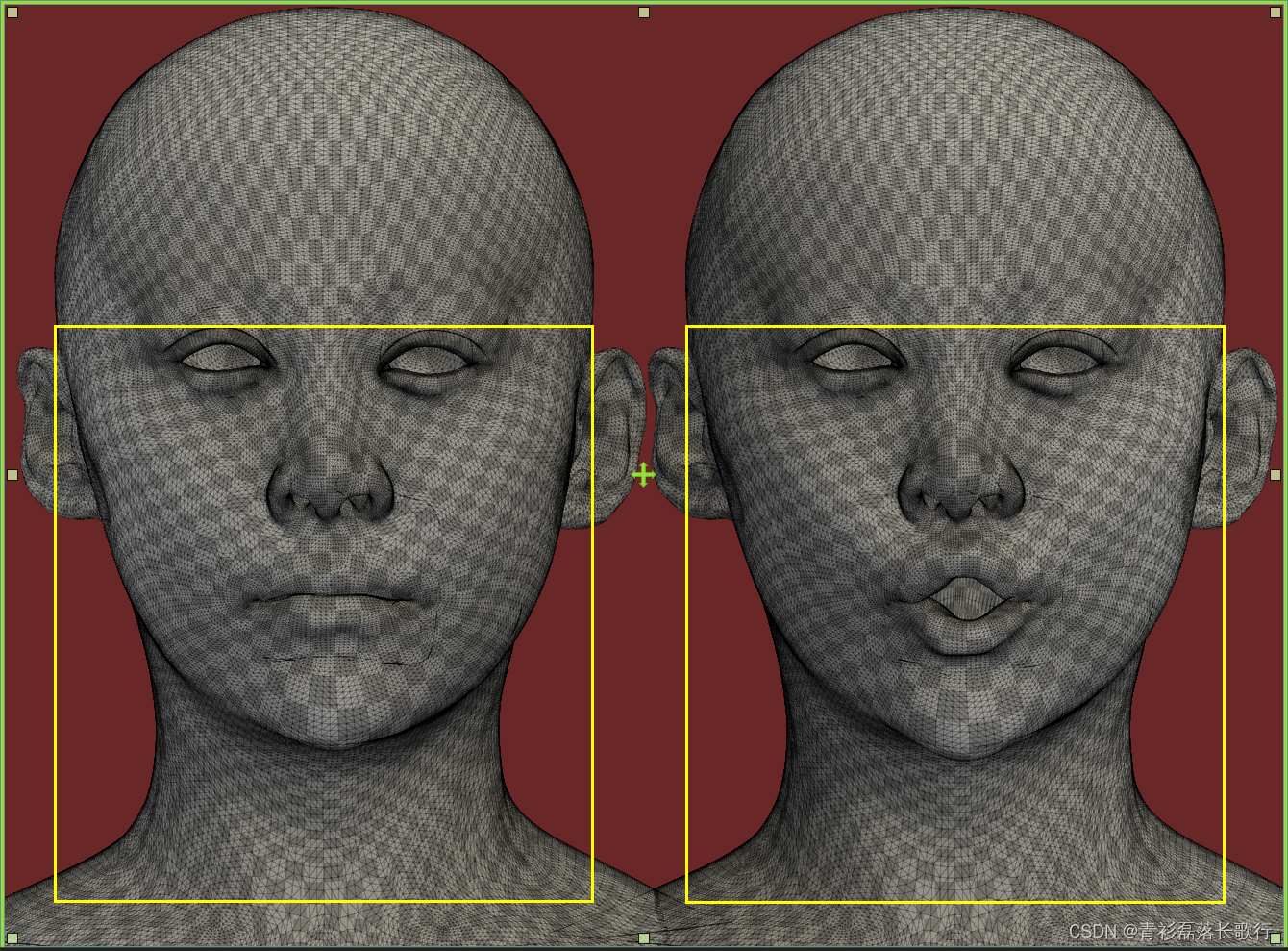 |  | 嘴巴形成漏斗形状。 |
| 46 | lipSuck | 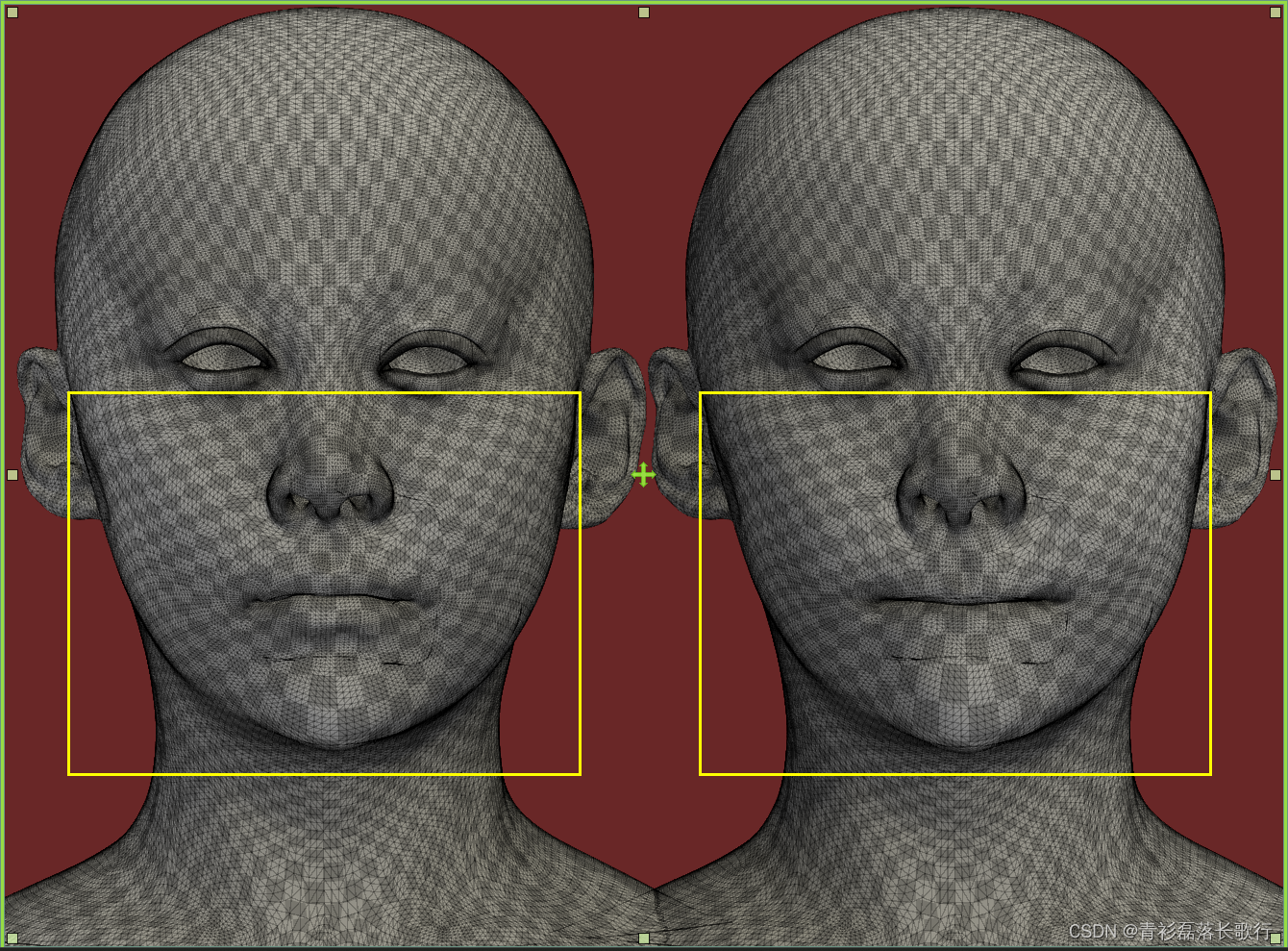 |  | 吮吸嘴唇。 |
这篇关于Audio2Face相关建模BS绑定对应表的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






