本文主要是介绍UE4/UE5 Runtime下的Mesh合并,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
原创文章,转载请注明出处。
StaticMesh的合并
- 前言
- 类图
- Editor下的实现
- Runtime下的实现
- 难点1,StaticMesh的RenderData转FMeshDescription
- 难点2,StaticMesh构建复杂碰撞
- 难点3,多Section的StaticMesh合并之后材质出错
- 插件封装,现有功能介绍以及后续计划
- 参考文章
前言
引擎版本:4.27.2
合并的前提:在UE4.26.2之后,允许了在运行时构建UStaticmesh。之前的方式只支持编辑器下导入,
导入后转成UStaticMesh的RenderData进行渲染;
为什么要做合并:
需求的来源是软件我们想利用UE4.27.2的runtime下的udatasmith导入功能,
但是因为datasmith的设计初衷呢就是尽可能小的拆分模型,粒度很小。
所以有的udatasmith导入后会在关卡中有上万个,帧率极低。
所以才会有了该篇文章 在运行时来合并StaticMesh。
合批的优化方案如下
其实这里面是有很多可以做合批的。
所以,这里我就针对udatasmith导入这个功能,研究了一下合批的方案;
| 方案 | 优点 | 缺点 |
|---|---|---|
| 1>修改datasmith导入部分插件的代码 | 效率最高 | 不易维护 |
| 2>自己做一套 | 效率低于方案1,易维护 | 易维护 |
| 3>修改datasmith的导出插件 | 不确定 | 不易维护 |
使用哪一种方案?
方案1来讲的话,改DataSmith的源码,效率我认为是最好的。
为什么:
首先说方案1的做法:在一个个的actor还没有spawn,mesh还没有build,collsion,材质等这些信息还没有build之前, 我们提前过滤好哪些Mesh可以被合并,之后再spawn MeshActor,build StaticMesh的vertex,collision,material。
再说方案2的做法:所有的actor已经在世界中spawn出来了,StaticMesh的vertex,collision,material这些信息都已经build好了。再去过滤好哪些Mesh可以被合并,之后再spawn MeshActor,build StaticMesh的vertex,collision,material。
暂时实现了方案2
对比看的话,方案1是要比方案2效率高的。但方案1改起来比较麻烦,并且我认为不容易维护。看了一天之后,我先实现了方案2。
视频效果:Merge之后的帧率和DC明显提高跳转观看
UE4/UE5 Runtime下合并Mesh
类图
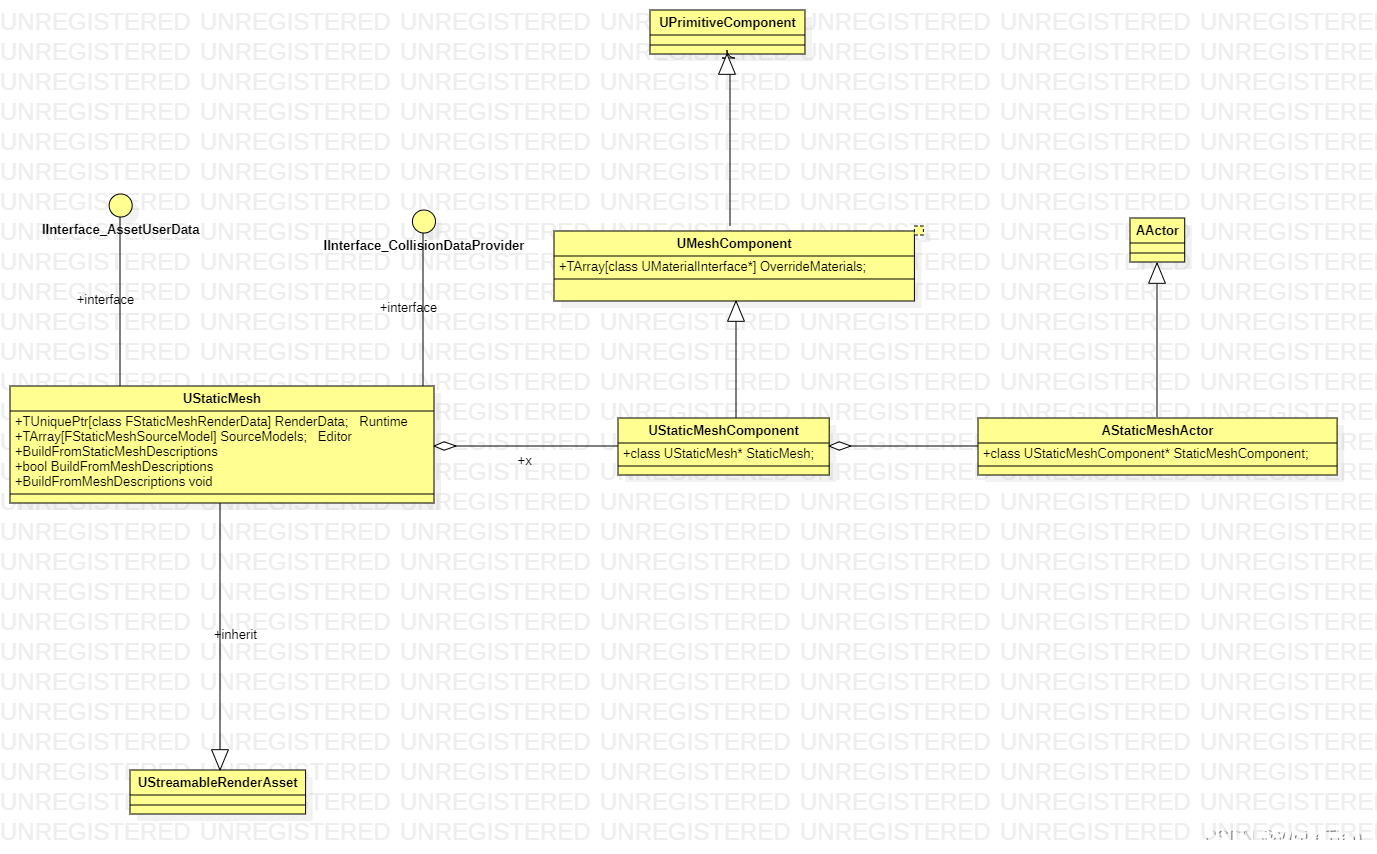
Editor下的实现
参考MergeActor Tool
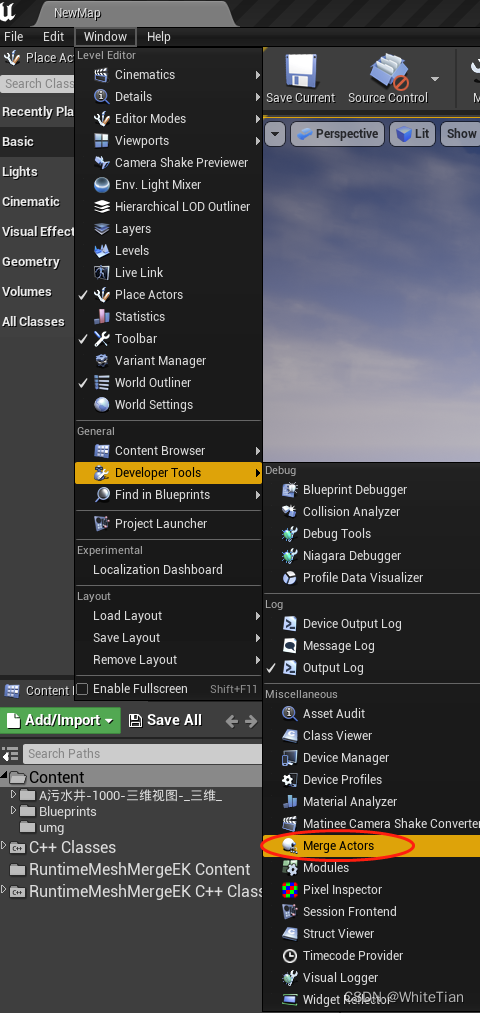
利用编辑器下的MergeActorTool工具的功能,很快就能在编辑器下实现合并的逻辑。Standlone下也可以合并。
但是需要注意的是这个只能在编辑器下用,打包就歇菜。
编辑器下合并具体的代码如下,作为参考:
//编辑器下的合并方法
void UMyBlueprintFunctionLibrary::MergeMy(const TArray<UPrimitiveComponent*>& ComponentsToMerge, UWorld* World,const FMeshMergingSettings& InSettings, UMaterialInterface* InBaseMaterial,UPackage* InOuter, const FString& InBasePackageName,TArray<UObject*>& OutAssetsToSync, FVector& OutMergedActorLocation,const float ScreenSize, bool bSilent /*= false*/, FString AppendName)
{const IMeshMergeUtilities& MeshUtilities = FModuleManager::Get().LoadModuleChecked<IMeshMergeModule>("MeshMergeUtilities").GetUtilities();MeshUtilities.MergeComponentsToStaticMeshWithName(ComponentsToMerge, GWorld, InSettings, InBaseMaterial, InOuter, InBasePackageName,OutAssetsToSync, OutMergedActorLocation, ScreenSize, bSilent, AppendName);
}
//合并具体逻辑,将相同材质的Mesh传进去即可完成合并。
TArray<UObject*> OutAssetsToSync;
FVector OutMergedActorLocation;
const float ScreenAreaSize = TNumericLimits<float>::Max();FMeshMergingSettings setting;
setting.bMergePhysicsData = 1;
MergeMy(mergedata.Value, GWorld,setting, nullptr, GetTransientPackage(), FString(),OutAssetsToSync, OutMergedActorLocation,ScreenAreaSize, true, mergedata.Key);UStaticMesh* UtilitiesMergedMesh = nullptr;
if (!OutAssetsToSync.FindItemByClass(&UtilitiesMergedMesh))
{// Error, TEXT("MergeStaticMeshActors failed. No mesh was created.continue;
}for (auto obj : OutAssetsToSync)
{auto umesh = Cast<UStaticMesh>(obj);if (!umesh)continue;/*auto mat0 = umesh->GetMaterial(0);if (!UKismetSystemLibrary::IsValid(mat0))continue;*/OutMergedActorLocation+=FVector(0,0,500);auto MergedActor = GWorld->SpawnActor<AStaticMeshActor>(AStaticMeshActor::StaticClass(), OutMergedActorLocation, FRotator(0, 0, 0));if (MergedActor){MergedActor->SetMobility(EComponentMobility::Movable);if (!MergedActor->GetStaticMeshComponent())continue;MergedActor->GetStaticMeshComponent()->SetStaticMesh(umesh);if (mergedata.Value.Num() > 0){UStaticMeshComponent* pSTM = Cast<UStaticMeshComponent>(mergedata.Value[0]);if (pSTM){//umesh->SetStaticMaterials(pSTM->GetStaticMesh()->GetStaticMaterials());}}GWorld->UpdateCullDistanceVolumes(MergedActor, MergedActor->GetStaticMeshComponent());MergedActor->AttachToActor(RootActor, FAttachmentTransformRules::KeepWorldTransform);
#if WITH_EDITORMergedActor->SetActorLabel(UKismetSystemLibrary::GetDisplayName(umesh));
#endif // endif}//删除被替代的RootActor
for (auto willremovecomp : mergedata.Value)
{if(!IsValid(DeleteActorArray[willremovecomp]))continue;if(!DeleteActorArray[willremovecomp]->IsValidLowLevel())continue;TArray<UActorComponent*> OutComponent;OutComponent = DeleteActorArray[willremovecomp]->K2_GetComponentsByClass(UStaticMeshComponent::StaticClass());if (OutComponent.Num() < 2){GWorld->DestroyActor(DeleteActorArray[willremovecomp]);}else{willremovecomp->DestroyComponent();}
}
}
Runtime下的实现
难点1,StaticMesh的RenderData转FMeshDescription
其实这个如果看过StaticMesh的人应该了解,在编辑器下合并的代码都是用的编辑器下StaticMesh独有的数据来合并的,就是下面的图。用到的变量为 SourceModels
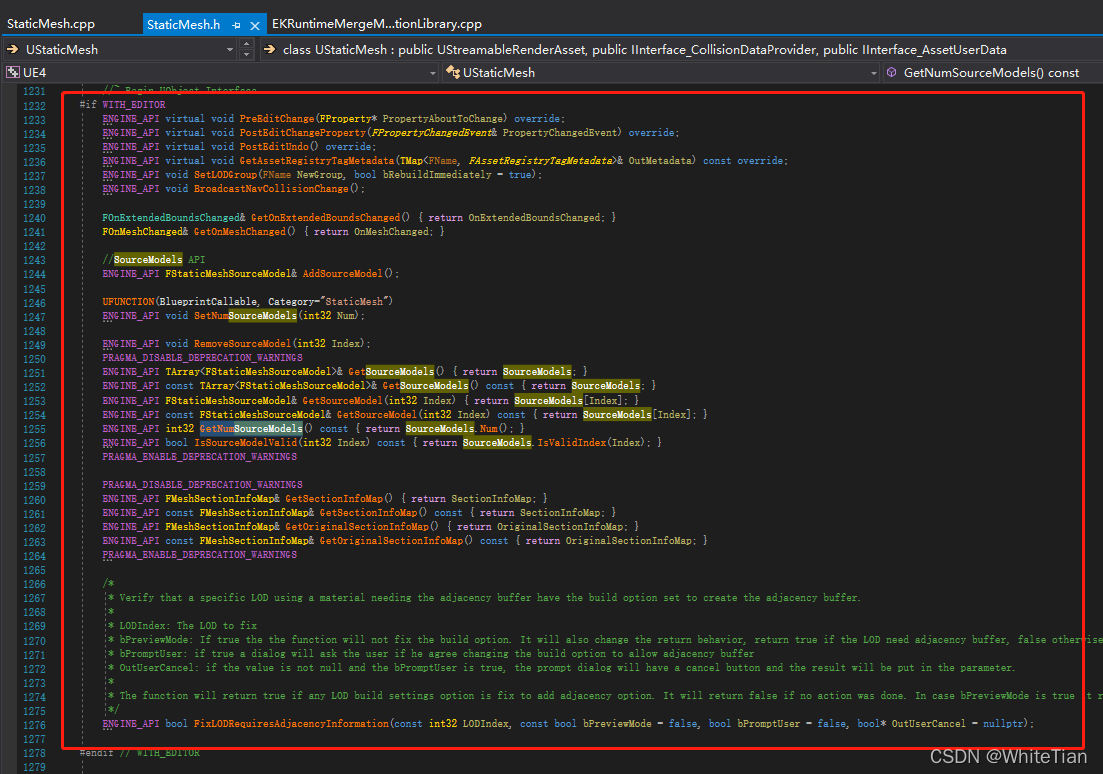
并且,编辑器下对StaticMesh的构建是最终会调用Build方法,但这些都在运行时无法使用。
我们需要使用引擎中新版本中的 BuildFromStaticMeshDescriptions来生成UStaticMesh。
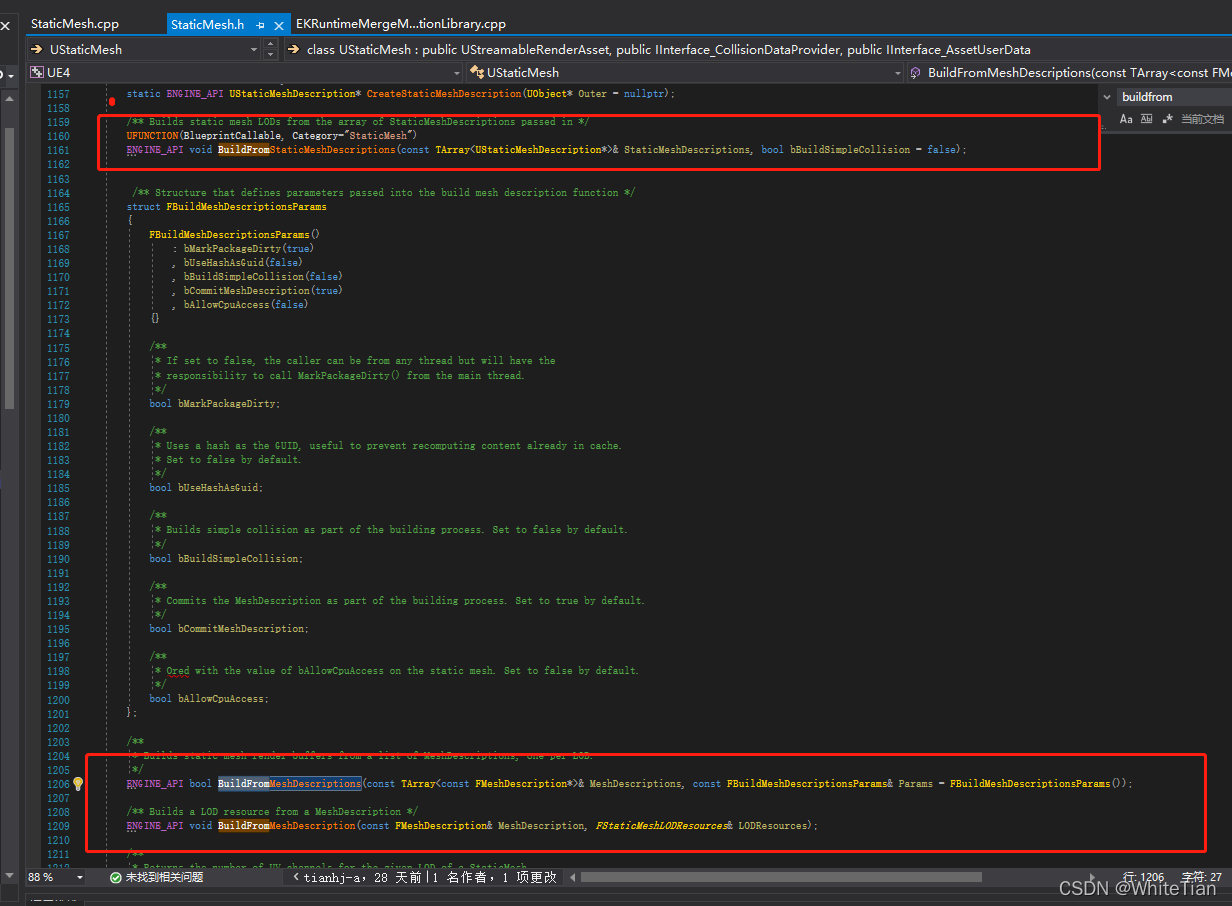
BuildFromStaticMeshDescriptions该方法需要的是FMeshDescription,FMeshDescription在编辑器下导入之后就有了,但是运行时UStaticMesh的SourceModels不存在了,怎么办?
我们需要反推,最终渲染的数据都存在UStaticMesh的RenderData中,所以我们就从RenderData里面把数据转成FMeshDescription数组就好了。
依次将每一个可以合并的Mesh的数据从RenderData转换成FMeshDescription,接着再将这些
FMeshDescription加到一次,再给到UStaticMesh的BuildFromStaticMeshDescriptions传进去就搞定了(此处需要注意数据的大小,UE的序列化不能超2G,但是好在这块都是我们自己写,再拼接FMeshDescription的时候我们把内存控制好就行了,这块也关系到合并的速度)
具体步骤概括一下其实就是:
1>RenderData转FMeshDescription
2>拼接所有的FMeshDescription:方法
static void AppendMeshDescription(const FMeshDescription& SourceMesh, FMeshDescription& TargetMesh, FAppendSettings& AppendSettings);
3>调用BuildFromStaticMeshDescriptions
难点2,StaticMesh构建复杂碰撞
要构建复杂碰撞,那么就要调用
UBodySetup->CreatePhysicsMeshes(),如果仔细跟过的话,进去后会发现,在Runtime下,build碰撞会调用ProcessFormatData_PhysX或者ProcessFormatData_Chaos,但是前提条件必须满足IsRuntime的判断。
我发现这块的原因就是,合并好之后,我在创建UStaticMesh对象的时候写法就是普通的,NewObect<UStaticMesh>(xxxxxxx),结果在IsRuntime的判断那里一直为false。
if (IsRuntime(this)){
#if WITH_PHYSX && PHYSICS_INTERFACE_PHYSXbClearMeshes = !RuntimeCookPhysics_PhysX();
#elif WITH_CHAOSbClearMeshes = !RuntimeCookPhysics_Chaos();
#endif}
void UBodySetup::CreatePhysicsMeshes()
{TRACE_CPUPROFILER_EVENT_SCOPE(UBodySetup::CreatePhysicsMeshes);SCOPE_CYCLE_COUNTER(STAT_CreatePhysicsMeshes);// Create meshes from cooked data if not already doneif(bCreatedPhysicsMeshes){return;}// If we don't have any convex/trimesh data we can skip this whole functionif (bNeverNeedsCookedCollisionData){return;}bool bClearMeshes = true;// Find or create cooked physics datastatic FName PhysicsFormatName(FPlatformProperties::GetPhysicsFormat());FByteBulkData* FormatData = GetCookedData(PhysicsFormatName);// On dedicated servers we may be cooking generic data and sharing itif (FormatData == nullptr && IsRunningDedicatedServer()){FormatData = GetCookedData(FGenericPlatformProperties::GetPhysicsFormat());}if (FormatData){
#if WITH_PHYSX && PHYSICS_INTERFACE_PHYSXbClearMeshes = !ProcessFormatData_PhysX(FormatData);
#elif WITH_CHAOSbClearMeshes = !ProcessFormatData_Chaos(FormatData);
#endif}else{if (IsRuntime(this))//这个地方在Runtime下如果你用的是UStaticMesh的话,是无法通过的。{
#if WITH_PHYSX && PHYSICS_INTERFACE_PHYSXbClearMeshes = !RuntimeCookPhysics_PhysX();
#elif WITH_CHAOSbClearMeshes = !RuntimeCookPhysics_Chaos();
#endif}}// fix up invalid transform to use identity// this can be here because BodySetup isn't blueprintableif ( GetLinkerUE4Version() < VER_UE4_FIXUP_BODYSETUP_INVALID_CONVEX_TRANSFORM ){for (int32 i=0; i<AggGeom.ConvexElems.Num(); ++i){if ( AggGeom.ConvexElems[i].GetTransform().IsValid() == false ){AggGeom.ConvexElems[i].SetTransform(FTransform::Identity);}}}#if WITH_CHAOS// For drawing of convex elements we require an index buffer, previously we could// get this from a PxConvexMesh but Chaos doesn't maintain that data. Instead now// it is a part of the element rather than the physics geometry, if we load in an// element without that data present, generate a convex hull from the convex vert// data and extract the index data from there.for(FKConvexElem& Convex : AggGeom.ConvexElems){Convex.ComputeChaosConvexIndices();}
#endifif(bClearMeshes){ClearPhysicsMeshes();}bCreatedPhysicsMeshes = true;}
费了半天劲,才找导解决方案。
1>首先需要从UStaticMesh派生一个类出来;
2>并且这个类的bAllowCPUAccess必须为true;
3>并且要重载一下GetWorld();
然后自己在加一个SetWorld方法;
这个类的具体代码如下 :
/*
* 从UStaticMesh派生的类,允许在运行时烹饪碰撞网格
* 要做到这一点,bAllowCPUAccess必须为true,并且方法GetWorld()必须返回一个有效的world
* 否则在Cook的时候有个IsRuntime()的判断是一直为假
*/
UCLASS()
class EASYKITRUNTIMEMERGEMESH_API UEKRMM_RuntimeMesh : public UStaticMesh
{GENERATED_BODY()public:UEKRMM_RuntimeMesh(): World(nullptr){// 设置bAllowCPUAccess为true,允许将渲染数据三角形复制到碰撞网格中 bAllowCPUAccess = true;}// UObject覆盖//覆盖允许烹饪碰撞网格,简单和复杂,从静态网格在运行时 virtual UWorld* GetWorld() const override { return World ? World : UStaticMesh::GetWorld(); }// 结束UObject覆盖//使用有效的世界,允许碰撞网格烹饪,简单和复杂,从静态网格在运行时void SetWorld(UWorld* InWorld) { World = InWorld; }private:UWorld* World;
};
用法就比较简单了,如下,之后再去调用UBodySetup->CreatePhysicsMeshes()就OK了:
UEKRMM_RuntimeMesh* StaticMesh = NewObject< UEKRMM_RuntimeMesh >(GetTransientPackage(), MeshName, RF_Public | RF_Standalone);
if(!StaticMesh)continue;
StaticMesh->InitResources();
//必须设置世界
StaticMesh->SetWorld(RootActor->GetWorld());
难点3,多Section的StaticMesh合并之后材质出错
当一个UStaticMesh具有多材质的这种,其实RenderData里面是分了多个Section的。
每个Section的结构体为FSectionInfo
下面的代码是从StaticMesh的RenderData里面提取Section,OutSections数组是多个的,那么就证明你的StaticMesh是多材质的,依次对应的关系。为什么说 这个是个难点,请继续往下看。
void UEKRMM_BlueprintFunctionLibrary::EKRMM_ExtractSections(const UStaticMeshComponent* Component, int32 LODIndex, TArray<FSectionInfo>& OutSections)
{static UMaterialInterface* DefaultMaterial = UMaterial::GetDefaultMaterial(MD_Surface);const UStaticMesh* StaticMesh = Component->GetStaticMesh();TArray<FName> MaterialSlotNames;for (const FStaticMaterial& StaticMaterial : StaticMesh->GetStaticMaterials()){
#if WITH_EDITORMaterialSlotNames.Add(StaticMaterial.ImportedMaterialSlotName);
#elseMaterialSlotNames.Add(StaticMaterial.MaterialSlotName);
#endif}for (const FStaticMeshSection& MeshSection : StaticMesh->GetRenderData()->LODResources[LODIndex].Sections){// Skip empty sectionsif (MeshSection.NumTriangles == 0){continue;}// Retrieve material for this sectionUMaterialInterface* StoredMaterial = Component->GetMaterial(MeshSection.MaterialIndex);// Make sure the resource actual exists, otherwise use default materialStoredMaterial = (StoredMaterial != nullptr) && StoredMaterial->GetMaterialResource(GMaxRHIFeatureLevel) ? StoredMaterial : DefaultMaterial;// Populate section dataFSectionInfo SectionInfo;SectionInfo.Material = StoredMaterial;SectionInfo.MaterialIndex = MeshSection.MaterialIndex;SectionInfo.MaterialSlotName = MaterialSlotNames.IsValidIndex(MeshSection.MaterialIndex) ? MaterialSlotNames[MeshSection.MaterialIndex] : NAME_None;SectionInfo.StartIndex = MeshSection.FirstIndex / 3;SectionInfo.EndIndex = SectionInfo.StartIndex + MeshSection.NumTriangles;if (MeshSection.bEnableCollision){SectionInfo.EnabledProperties.Add(GET_MEMBER_NAME_CHECKED(FStaticMeshSection, bEnableCollision));}if (MeshSection.bCastShadow && Component->CastShadow){SectionInfo.EnabledProperties.Add(GET_MEMBER_NAME_CHECKED(FStaticMeshSection, bCastShadow));}OutSections.Add(SectionInfo);}
}
上面难点一的提取数据中说道,从RenderData里面提取完每个Mesh的MeshDescription之后,调用static void AppendMeshDescription(const FMeshDescription& SourceMesh, FMeshDescription& TargetMesh, FAppendSettings& AppendSettings);这个静态方法才可以将数据拼接到一起。这里注意第三个参数,FAppendSettings这个结构体参数传入的时候如果传入不慎,会导致Section就有一个,原本多个section,合并完了变成1个了,那不就出错了。主要是AppendSettings里面的Lambda需要指定,这个藏的比较深。并且逻辑要正确,因为AppendMeshDescription里面需要用到那个lambda。这是第一个会导致材质section出错的问题。
如何验证是否正确呢? 合并完之后可以看 输出参数FMeshDescription& TargetMesh的PolygonGroups是几个,如果原先数组内有多个索引比如0和1,合并完了数组内的索引都变成0了,那就是错了,正确的应该保持不变。
如果发现最终效果你发现还不对
但是PolygonGroups通过AppendMeshDescription发现数据都是正确的。
我们断点看一下UStaticMesh最终渲染数据的Section的索引是否是正确的,
StaticMesh->GetRenderData()->LODResources[LODIndex].Sections)
我遇到的情况是Sections虽然是数组没错,但是索引都是0,那么效果肯定就不对了
原因是因为BuildFromMeshDescription下面代码里面的MaterialIndex 指定的位置都赋值了0,那么为什么是0呢,因为MaterialIndex的赋值是通过GetStaticMaterials().IndexOfByPredicate,里面看函数体是用的材质槽的名称,由于我的材质槽名称都是一样的,所以找到的下标都是0。
到这就知道怎么做了:在build之前,将staticmesh的材质槽首先要分配好,并且名称要具有唯一性,不能重复。和NewObject<UEKRMM_RuntimeMesh>传入的名称一样,必须具有唯一性。
源码下面这个方法里面
void UStaticMesh::BuildFromMeshDescription(const FMeshDescription& MeshDescription, FStaticMeshLODResources& LODResources)
{//省略好多代码Section.NumTriangles = TriangleCount;Section.MinVertexIndex = MinVertexIndex;Section.MaxVertexIndex = MaxVertexIndex;const int32 MaterialIndex = GetStaticMaterials().IndexOfByPredicate([&MaterialSlotName = MaterialSlotNames[PolygonGroupID]](const FStaticMaterial& StaticMaterial) { return StaticMaterial.MaterialSlotName == MaterialSlotName; });Section.MaterialIndex = MaterialIndex; 注意这里的MaterialIndex,是通过IndexOfByPredicate这个方法来算出来的,这个是啥意思?就是在我这个TArray里面,遍历它每一个元素,找到条件第一个符合函数体的内容,返回出去。Section.bEnableCollision = true;Section.bCastShadow = true;if (MaxVertexIndex > TNumericLimits<uint16>::Max()){IndexBufferStride = EIndexBufferStride::Force32Bit;}SectionIndex++;//省略好多代码
}
插件封装,现有功能介绍以及后续计划
目前支持的功能:
1>所有相同材质的mesh合并到一起:传入一个AActor对象作为RootActor,能够将RootActor下的所有材质相同的UStaticmeshComponent合并成单个UStaticMesh;
2>材质正确
3>保证有复杂碰撞
4>坐标正确
5>待添加:合并之前的大小计算,分块:主要目的是满足序列化以及兼顾合并效率
6>待添加:减面插件,合并时候可以动态减面,我准备同样弄一个插件出来,运行时的减面算法
7>待添加:USkeletalMesh的Merge
8>:序列化
参考文章
Datasmith Runtime 官方的Blog
Unreal Engine 4.27 Datasmith Runtime Import
UE – StaticMesh 分析
这篇关于UE4/UE5 Runtime下的Mesh合并的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







