本文主要是介绍MGRS坐标,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一 概述
MGRS坐标系统,即军事格网参考系统,是北约(NATO)军事组织使用的标准坐标系统。它基于UTM(通用横向墨卡托)系统,并将每个UTM区域进一步划分为100km×100km的小方块。这些方块通过两个相连的字母标识,其中第一个字母代表经度区的东西位置,第二个字母代表南北位置。例如,UTM点35 V 414668 6812844等价于MGRS点35VMJ1466812844。MGRS坐标的精度可以达到米级,使用15个字符表示,其中最后10个字符表示指定网格中的以东和以北的值。此外,MGRS坐标也可以表示为13、11、9或7个字符,分别对应1米、10米、100米、1,000米或10,000米的精度。
MGRS坐标系统的应用不仅限于军事领域,它还被佛罗里达等州消防队长协会(FFCA)确立为通用坐标系,与USGS(美国国家格网系统)地图一起使用,这些地图同样采用显示UTM坐标的数字和字母系统。
MGRS坐标由一个字母数字字符串组成,包括零到两位数字、三个字母以及最多十位数字。有关MGRS坐标的更多详细信息,可以参阅相关附录。
二 例子
例子:10SGJ0683244683,或隔开写成10S GJ 06832 44683,以方便人类阅读。
简单来说,就是以通用横轴墨卡托投影(UTM)为基础,将地球表面划分为若干区域(两极高纬度地区用UPS投影)。
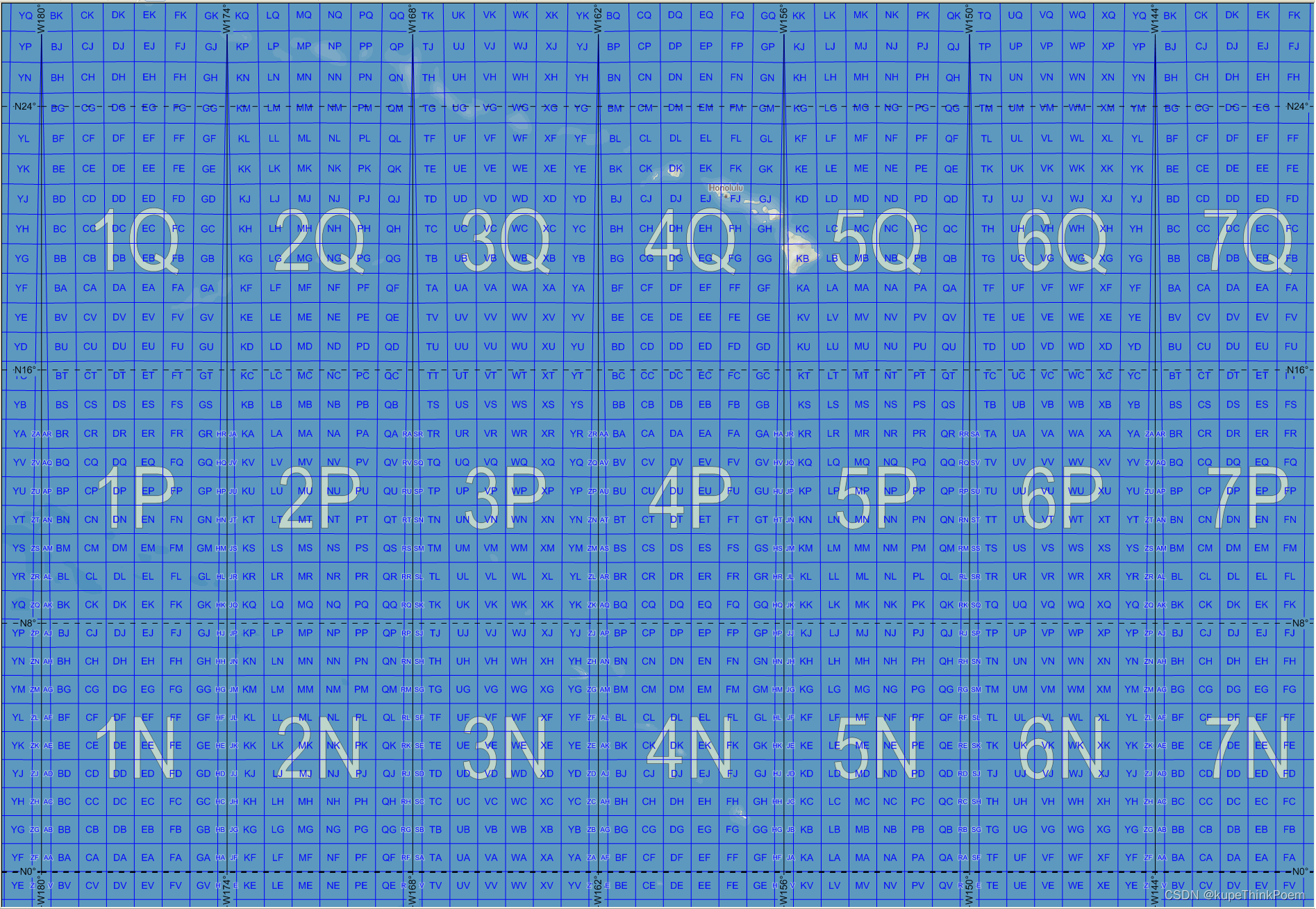
10S GJ是10S区域内一个边长为十万米(100km)的方格,这个有图表可以查询。
以西南角为起点,向东06832米,向北44683米,就是具体坐标位置。
这个坐标位置实际上不是一个点,而是1m × 1m的方格范围。通过调整坐标位数,也可以获得更粗略的位置范围。
10S GJ 06832 44683是边长为1m的方格
10S GJ 0683 4468是边长为10m的方格
10S GJ 068 446是边长为100m的方格
10S GJ 06 44是边长为1000m的方格
10S GJ 0 4是边长为10000m的方格
10S GJ是边长为100000m的方格
注意:需要更低的精度时,要截断数字,而不是四舍五入,因为获得的坐标是包含精确位置的更大方格。
34U GA 09870 25696 利沃夫
36U UA 12942 94840 基辅
34U GA 07133 95592 Przewodow
这篇关于MGRS坐标的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!