本文主要是介绍深度学习小目标检测问题——(转载)谈一谈深度学习之semantic Segmentation,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
https://www.cnblogs.com/daihengchen/p/6345041.html
上一次发博客已经是9月份的事了…这段时间公司的事实在是多,有写博客的时间都拿去看paper了…正好春节回来写点东西,也正好对这段时间做一个总结。
首先当然还是好好说点这段时间的主要工作:语义分割。semantic segmentation 应该是DL这几年快速发展的最重要的领域之一了,但可惜的事,在这方面大家走的并不是很远,还是有很多值得改进的地方,这当然是个很好的事情,特别是我这种想发paper弱渣…
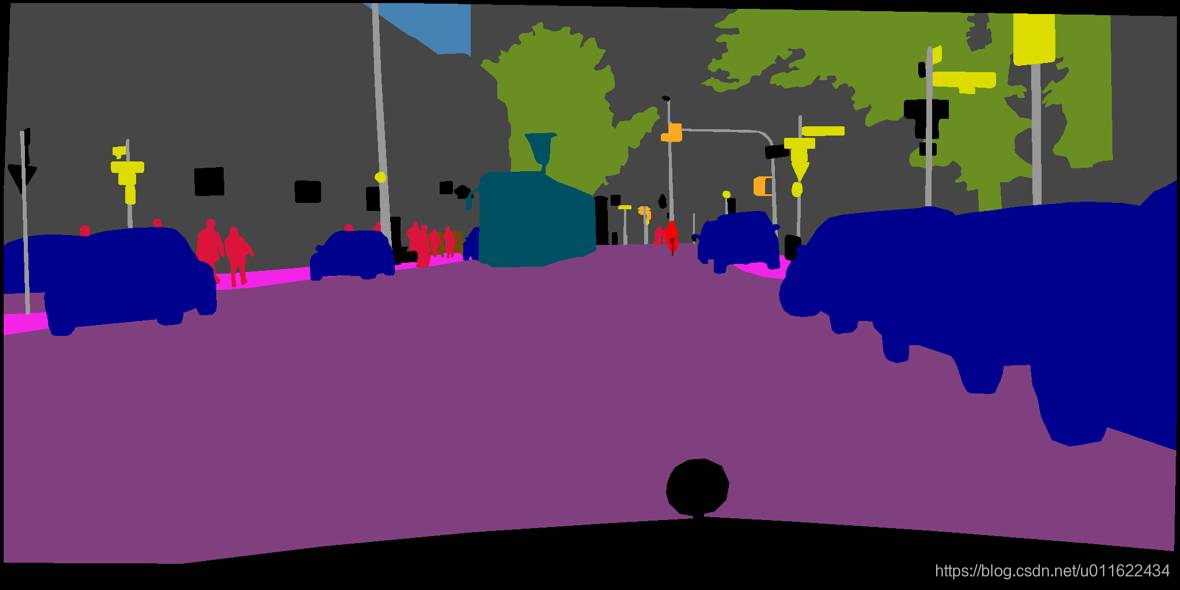
语义分割做的是什么事呢? 就是给你一张图,你要对其中的每个pixel做分类,例如把所有的人都涂成红色,车都涂成蓝色。这是在机器人领域和自动驾驶中都非常重要的一步,因为我们开始让电脑真正的开始认识这个世界了。如下图所示:

semantic segmentation的转折点是从long的那那篇FCN开始的,之前的方法大多是用PGM建模的方法来做,原理都很清楚,但效果就是不好,因为难以解决的问题太多了。等DL大火之后,果然还是DL大法好,FCN这篇文章我之前是写过笔记的,那时候还比较年轻,现在再好好说一下。
这篇文章提出来的全卷积的概念并不新鲜, 也无怪乎lecun再FCN获得CVPR的best paper后吐槽了一发,但个人觉得现在DL领域,关键的不是谁提出了什么,而是谁做出了什么,谁做的更好,毕竟效果好才是王道。回到FCN,他的思路很简单,VGG最后的全联接层使得我们的输入只能是固定的,这个很不好,所以就用全卷积层来代替它,这样就可以任意输入了,全卷积层这里有个很多人都有的概念的疑惑,那就是为什么会有人说11的卷积就等价于全连接层呢?(而且还是lecun说的…)这事我也纠结过,我们很简单的理解,和全连接层等价的肯定是kernel和feature map一样大的卷积层,但lecun这么说是有语境的…因为在做全连接层之前,我们要把图像拉成一列,如114096这种,这样对他做11的卷积就等价于全连接层了…也算是我一个无聊的发现…
说说FCN的创新点和问题,最大的创新点就是skip connection了,这个trick到现在都是很不错的想法,不同level的feature map所提供的信息是不同的,所以在最后分类的时候都可以用到他们,semantic segmentation一直有一个trade-off,就是物体的边缘和物体整体的分类的正确性,high-level的feature能提供更细节的表现,low-level的feature侧重于于很大一块区域的准确性,传统解决这个问题的方法一般是两种:1.multi-scale的input。2.skip connection。 这方面最近有个叫refinenet的paper做的挺不错的,它用restnet的思想将网络分为两条路,一个负责location,一个负责refine,有兴趣可以去看看。 回到FCN的问题,也是我最想吐槽的一点…VGG的model时downsample 32倍的,所以FCN使用了原来classification一样的模型,所以在经过最后77点卷积之后,feature map就只有11点大小了…也就是说我们要从1*1点feature map上恢复到原图,虽然说它到channel很多,但毫无疑问,它提供的信息时严重不足的,这也无怪乎他得用skip connection了…这里要谈一谈downsample的问题,downsample太多的话会丢失原图的很多信息,毕竟我们是做pixel级别的分类,所以根据我的经验,一般是8倍或者16倍左右…
现在做semantatic segmentation 主要还是用的deeplab那一套,接下来我准备好好讲一下deeplab这一套方法…
deeplab那篇paper很推荐大家去看一下,他应该基本代表了现在semantic segmentation的state of art的流程了,我分几点说一下吧:
一、encoder层:
encoder层我的理解是把原图downsample的步骤,一般来说这一步使用的网络是和分类使用的一致的,分类的网络性能越强,最后大效果也就越好,所以现在普遍使用的是resnet(152),这里需要注意的问题就是,传统的classification下采样的倍数太大了,不利于分割,但是我们又不能不用pretrain-model,因为用了imagenet或者COCO的pretrain model,结果一定会涨。。而且收敛会快很多。这里通用的解决方法是用hole算法,其实说白了,就是使用dilated convlution,在卷积的时候,不是对一块连续的区域卷积,而是跳跃式的,如下图所示:

这样做的话有两个好处:
1.pretrain model可以用了,在需要downsample的地方,把所有的卷积变为一个dilation 2的卷积。
2.可以任意的提高感受野了,只要增加dilation即可,当然,有机会可以说一下,理论上的感受野不代表实际的感受野,因为会有很多的重合,所以理论感受野的中间会对最后的结果影响很大,而边缘地方影响很小,最近有篇paper也提到了这点,有时间放上链接吧。。。PS:因此在未来recepitive filed的研究上,我觉得好好解决这个问题是一个不错的思路。
二、decoder层:
和encoder层对应的自然就是decoder层,这个也很好理解,我们要对pixel做分类,自然就要把图像upsample到原图的大小(或者一半,然后再做biliner upsample),upsample的方法有几类,根据我的经验…都差不了多少,卷积+biliear或者卷积+反卷积或者卷积+unpooling,最后一个在deconvlution那篇paper出现的方法一度让我以为是通用的方法,直到发现大家开始抛弃pooling的downsample方法以后…不用pooling下采样很好理解,毕竟我们是做pixel级别的分类,所以还是用可学习的下采样,上采样的比较好。
另外,decoder层需要注意的事,实际上它并不需要和encoder层一样大,deconvlution那篇paper提出的对称结构确实优雅而且看起来就有理有据,但实际上并不是需要这么做的,enet的那篇paper对此做过说明,简单的理解就是:decoder实际上就是对feature map做一个upsample的refine,这个时候网络已经学习到了需要的东西了,毕竟我们并不是要去做一个autoencoder。。。
三、post-processing 后处理
后处理这个东西,其实有点小尴尬,作为刷榜的不二神器,他有两个问题:1.不符合现在很多人对end-to-end的迷之追求。2.太慢了,正常使用的dense crf会比神经网络慢很多,最后的实用场景基本不可能使用。
dense crf的调参也是我不能承受之痛…直到用了同事grid search的暴力调参大法,才结束我那段黑暗的日子…
不扯了,简单的说一下常见的后处理方法-CRF吧,crf作为经典的一个图模型,本来是semantic segmentation的主要方法,直到DL出现…最终沦为了后处理…DL+CRF有着天然的方便,为什么这么说了,CRF的优化是要有一个初始化的state的,也就是每个pixel的unary energy,如果只有label的方法等话,一般也就是用概率和置信度来暴力指定了,但其实神经网络的最后一层一般是softmax,所以我们完全可以用softmax的输出作为CRF中unary enargy的初始化,至于pair energy,还是常规的RGB像素值和XY location值了。
实际上,对于CRF大家是又爱又恨的,所以后面也出现了不少的改进方法,如CRF as RNN,CNN+LSTM这些,实际效果我没试过,但估计是呵呵了,比较期待的是北大的segmodel,看他们在cityscapes上的表现,感觉CVPR2017会有一个惊喜…
总结:
日常总结,segmentation是一个很不错的领域,但个人感觉大家主要还是在拼trick和调参技巧,这真是最没意思的行为了。但也很好,给了我们不少想象的空间,我最近的工作就是receptive filed 、side information上做点文章…希望可以出点东西吧。加油~
这篇关于深度学习小目标检测问题——(转载)谈一谈深度学习之semantic Segmentation的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





