本文主要是介绍非线性模型预测控制NMPC例子,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
NMPC概述
非线性模型预测控制(Nonlinear Model Predictive Control, NMPC)是一种用于控制非线性系统的高级控制策略。与线性MPC不同,NMPC需要处理系统的非线性特性,这使得优化问题更加复杂。NMPC通常使用迭代优化算法来求解非线性优化问题
NMPC基本原理
NMPC的目标是最小化未来若干个时间步上的目标函数,同时满足系统的动态约束和操作约束。一般的NMPC优化问题可以表示为:
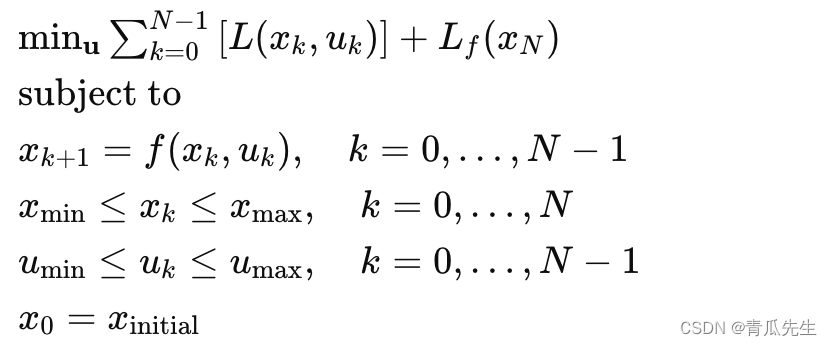
其中:
- x𝑘 是时间步 k 的系统状态。
- u𝑘 是时间步 k 的控制输入。
- f(x𝑘,u𝑘) 是系统的非线性动态方程。
- L(x𝑘 ,u𝑘) 是阶段成本函数。
- L f(x𝑁) 是终端成本函数。
- N 是预测时域的长度。
求解NMPC问题
求解NMPC问题通常使用迭代优化算法,如序列二次规划(Sequential Quadratic Programming, SQP)、内点法(Interior Point Method)或其他非线性编程(Nonlinear Programming, NLP)技术。
示例:使用CasADi求解NMPC问题
下面是一个使用Python和CasADi库实现NMPC的示例。CasA
这篇关于非线性模型预测控制NMPC例子的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!





