nmpc专题
非线性模型预测控制NMPC例子
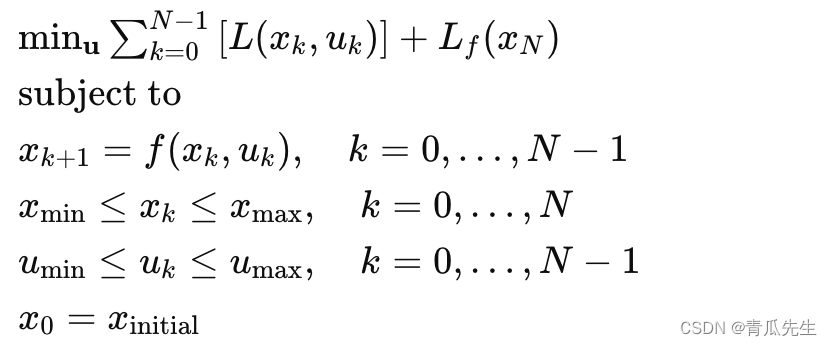
NMPC概述 非线性模型预测控制(Nonlinear Model Predictive Control, NMPC)是一种用于控制非线性系统的高级控制策略。与线性MPC不同,NMPC需要处理系统的非线性特性,这使得优化问题更加复杂。NMPC通常使用迭代优化算法来求解非线性优化问题 NMPC基本原理 NMPC的目标是最小化未来若干个时间步上的目标函数,同时满足系统的动态约束和操作约束。一般的N

Matlab仿真——基于NMPC实现飞行机器人运动规划
本文参考Matlab官方例程实现。 【问题描述】 假设有一台飞行机器人,如下,其位置用表示,速度为,一共有四个推力矢量输入,分别用表示 【数学模型表示】 建立上述机器人的状态空间模型[1],状态表示为 由模型可得: 【MPC控制】 建立完状态空间表达式,接下来是MPC控制器的实现,相关原理可参考其他博客,在这里使用Matlab工具箱实现。 代价函数:最小化输入量 终端