本文主要是介绍MOOC 数据结构 | 7. 图(中),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
最短路径问题
最短路径问题的抽象
- 在网络中,求两个不同顶点之间的所有路径中,边的权值之和最小的那一条路径
- 这条路径就是两点之间的最短路径(Shortest Path)
- 第一个顶点为源点(Source)
- 最后一个顶点为终点(Destination)
问题分类
- 单源最短路径问题:从某固定源点触发,求其到所有其他顶点的最短路径、
□ (有向) 无权图
□ (有向) 有权图
- 多源最短路径问题
无权图的单源最短路算法
- 按照递增(非递减)的顺序找出各个顶点的最短路
 BFS!
BFS!
该过程是从v3开始,先访问的是v3的邻接点,之后每次都是访问上一个顶点的邻接点。这个过程和BFS类似,但又不完全相同。
| void BFS(Vertex S) { Enqueue(S, Q); while(!IsEmpty(Q)) { V = Dequeue(Q); for ( V的每个邻接点W) if ( Enqueue(W, S); } } } | void Unweighted(Vertex S) { Enqueue(S,Q); while(!IsEmpty(Q)) { V = Dequeue(Q); //distp[V]已经获取了 for(V的每个邻接点W) if(dist[W] == -1) { //W没有被访问过 dist[W] = dist[V] + 1; //dist[W]的距离就是上一个顶点V + 1 path[W] = V; //S到W的必经点,就是W的前一个顶点V Enqueue(W,Q); } } } |
在计算最短距离时,不需要visited[ ],但是需要记录距离,dist数组初始化为一个负数或无意义的其他数,则当dist中的数等于该数时,则表示该顶点没有被访问过:(定义如下两个个数组)
| dist[W] = S到W的距离 dist[S] = 0 path[W] = S到W的路径上经过的某顶点 |
Unweighted函数中记录path数组的作用:如要打印S到W的路径,先看path[W]为多少,它一定是前一个顶点,再看path[V],就是V前一个顶点;于是可以顺着path数组一个一个向前推,推到源点,得到W到S的路径,将反向推的路径压入堆栈(堆栈起反序的作用),再从S开始一个一个出栈,就得到了S到W的路径。
时间复杂度:(假设用的邻接表 ) ,因为在算法执行过程中,每个顶点Enqueue一次,Dequeue一次,所以涉及到2V,for是将每条边(E)访问一次。
那么究竟整个算法是怎么工作的呢?
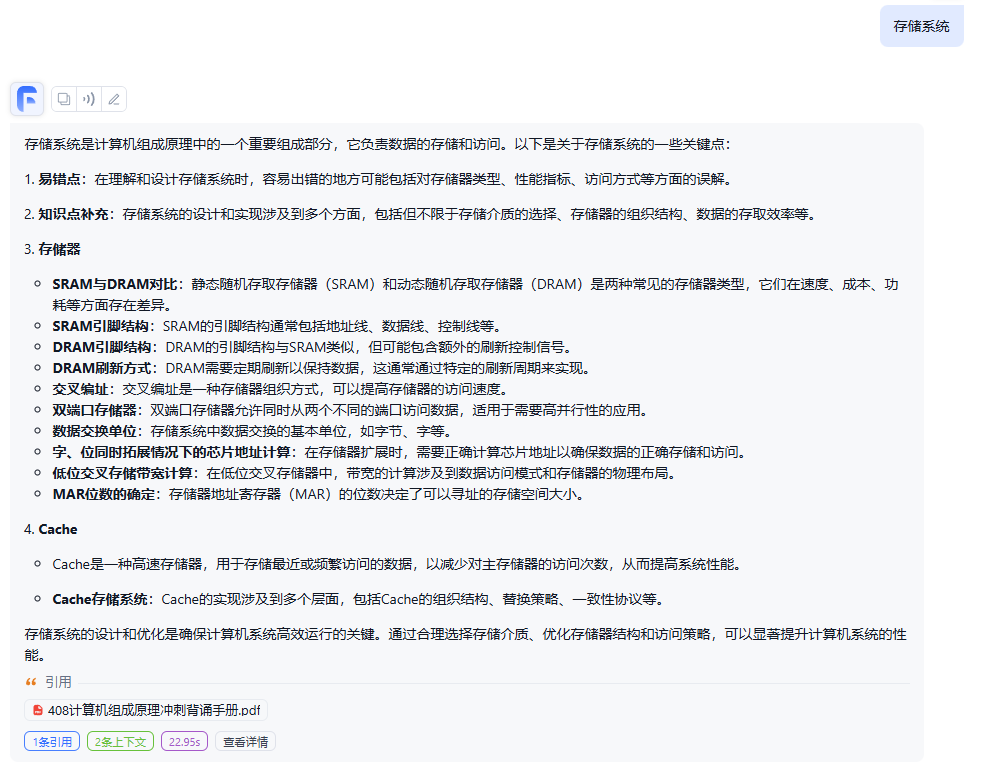
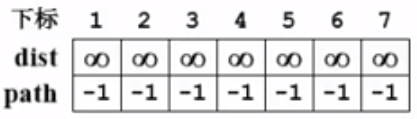
首先对数组dist和path进行初始化,都初始化为-1:
取图中的v3为源点,那么dist[3] = 0:

以上完成了初始化。接下来开始调用Unweighted函数:
1、因为源点为v3,所以调用Unweighted(3):
根据Unweighted函数的执行过程,v3先入队:
然后执行while循环,判断队列是否为空,不为空,就将队列中的元素v3出队:
然后检查v3的邻接点(v1和v6),先看v1即dist[1] == -1?发现是的,于是dist[1] = dist[3] + 1 = 1, path[1] = 3,并将v1入队:

接着考虑下一个邻接点v6,v6也没有被访问过,所以更新dist[6]和path[6],并将v6入队:

到此,对v3完成了操作。for循环结束,回到while循环继续执行。
2、此时队列不为空,要出队v1,
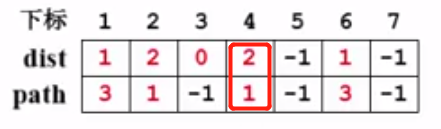
考察v1的邻接点(v2,v4),先看v2没有被访问过,于是更新dist[2] = dist[1] + 1 = 2和path[2] = 1,并将v2入队:
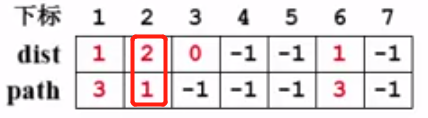 (其中的dist[2] = 2的意思是v2到v3的最短距离是2,v2到v3的最短距离是经过v1完成的。)
(其中的dist[2] = 2的意思是v2到v3的最短距离是2,v2到v3的最短距离是经过v1完成的。)
接下来考虑v4,类似地过程-更新dist[4] = dist[1] + 1 = 2,path[4] = 1,v4入队:
3、又回到while循环,此时队列不为空,于是标记一下v6,v6出队,而v6没有邻接点,所以for循环不会执行,直接又回到while循环。
 ,
,
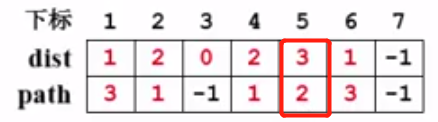
4、队列不为空,v2出队,
v2的邻接点有两个v4和v5,而v4的dist[4] = 2,所以v4已经得到了它的最短距离,就不需要改变了;继续看一下v5,dist[5] = -1,所以更新dist[5] = dist[2] + 1,path[5] = 2, v5进队:
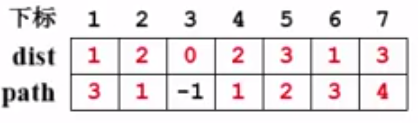
5、队列不为空,出队v4,v4有四个邻接点:v3,v5,v6,v7。其中v3,v5,v6都已经被访问过。只有v7没有被访问过,根据v4的距离向外扩展一步,更新dist[7]和path[7],并将v7入队:
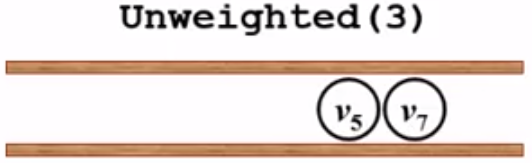
6、 标记一下v5,出队v5,v5只有一个邻接点v7,而v7已经被被访问过,所以什么都不做,回去到while循环
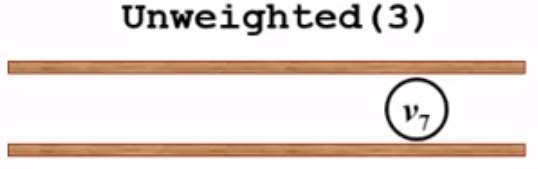
7、出队v7,而其他顶点都被访问过,再回到while循环
8、此时队列为空,所以程序结束。
dist数组中存储的是每一个顶点到v3的最短距离。
如果要求输出v3到v7的最短路径,做法是:
(1)从path[7]开始,发现path[7] = 4, 意思是最短路径是从v4到达的v7;
(2)再追踪path[4],而path[4] = 1,意思是最短路径是从v1到到达的v4;
(3)跟踪path[1],path[1]= 3,意思是最短路径是从v3到到达的v1;
(4)跟踪path[3],发现path[3] = -1, 小于0,意味着v3就是源点。
(5)所以v3到v7的最短路径就是v3->v1->v4->v7
源码
/* 邻接表存储 - 无权图的单源最短路算法 *//* dist[]和path[]全部初始化为-1 */
void Unweighted ( LGraph Graph, int dist[], int path[], Vertex S )
{Queue Q;Vertex V;PtrToAdjVNode W;Q = CreateQueue( Graph->Nv ); /* 创建空队列, MaxSize为外部定义的常数 */dist[S] = 0; /* 初始化源点 */AddQ (Q, S);while( !IsEmpty(Q) ){V = DeleteQ(Q);for ( W=Graph->G[V].FirstEdge; W; W=W->Next ) /* 对V的每个邻接点W->AdjV */if ( dist[W->AdjV]==-1 ) { /* 若W->AdjV未被访问过 */dist[W->AdjV] = dist[V]+1; /* W->AdjV到S的距离更新 */path[W->AdjV] = V; /* 将V记录在S到W->AdjV的路径上 */AddQ(Q, W->AdjV);}} /* while结束*/
}有权图的单源最短路算法
1、
 (v1选做源点,v6选做终点)
(v1选做源点,v6选做终点)
 (最短路径是v1->v4->v7->v6)
(最短路径是v1->v4->v7->v6)
可以发现有权图的最短路径不一定是经过的顶点数最少的路径。
2、
 (v5为源点,v4为终点,而权重表示路上的花费,那么-10表示不但不花费,还会得到钱)
(v5为源点,v4为终点,而权重表示路上的花费,那么-10表示不但不花费,还会得到钱)
要求v5到v4花销最小 ,那么沿着v5->v4->v2->v5这个路径不断绕圈,就能得到无穷大的钱(每一次都会有2 +3 -10 = -5,即5元的收入)。

如果图里有负值圈,那么算法就会挂掉。后续的讲解不考虑这种情况。
有权图最短路算法也是:按照递增的顺序找出各个顶点的最短路
解决有权图最短路算法有一个名称:

Dijkstra算法
- 令S = {源点s + 已经确定了最短路径的顶点
}
- 对任一未收录的顶点v,定义dist[v] 为s到v的最短路径长度,但该路径仅经过S中的顶点。即路径{
}的最小长度
- 若路径是按照递增(非递减)的顺序生成的,则
- 真正的最短路必须只经过S中的顶点
- 每次从未收录的顶点中选一个dist最小的收录(贪心)
- 增加一个v进入S,可能影响另一个w的dist值! ---(如果v加入到S后,w的dist值变小,那么v一定在路径上,v到w一定有一条直接的边,即w一定是v的邻接点,v加入后能影响的就是它的邻接点。)
- dist[w] = min{ dist[w] , dist[v] + <v,w>的权重}
算法框架
void Dijkstra(Vertex s)
{while(1) {V = 未收录顶点中dist最小者;if(这样的V不存在) //全部被收录break;collected[V] = true;for(V的每个邻接点W) if(collected[W] == false) {if(dist[V] + E<v,w> < dist[W]) {dist[W] = dist[V] + E<v,w>;path[W] = V;}}}
}
/*不能解决有负边的情况*/这个算法的初始化:
1、dist[s] = 0
2、与s直接相连的初始化为权重
3、与s没有直接相连的初始化为+∞ (因为dist[V] + E<v,w> < dist[W] 才能进行更新)
时间复杂度
Dijstra算法的时间复杂度取决于是如何解决“dist[V] + E<v,w> < dist[W]”,同时也会确定“dist[W] = dist[V] + E<v,w>;”的更新方法。
- 方法1:直接扫描所有未收录顶点 -- O(|V|)
- T = O(|V|² + |E|) ----------- 对于稠密图(E = V²)效果好
- 方法2:将dist存在最小堆中 -- O(log|V|)
- 更新dist[w] 的值 -- O(log|V|)
- T = O(|V| log|V| + |E| log|V|) = O(|E| log|V|) ----对于稀疏图(E和V是相同数量级)效果好
算法流程
void Dijkstra(Vertex s)
{while(1) {V = 未收录顶点中dist最小者;if(这样的V不存在) //全部被收录break;collected[V] = true;for(V的每个邻接点W) if(collected[W] == false) {if(dist[V] + E<v,w> < dist[W]) {dist[W] = dist[V] + E<v,w>;path[W] = V;}}}
}1、调用Dijstra算法之前,要进行初始化:
这个例子中选择v1作为源点,于是相应的,dist[1] = 0,同时v1的邻接点(v1和v4)到源点的最短距离就是边的权重,于是v2到源点的距离更新为2,path[2] = 1;邻接点v4,dist[4] = 1,path[4] = 1。

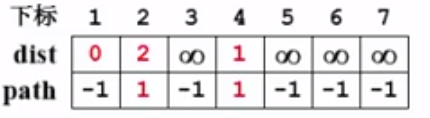
至此,初始化完成。
2、开始执行Dijstra算法:
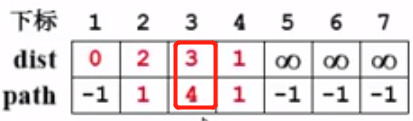
传入v1,接着要从未收录的顶点中选择dist最小的,无论使用扫描还是最小堆,v1因为是源点,不算;发现v4最小,所以V = v4,collcted[4] = true,表示访问过。
v4的邻接点:v3,v5,v6,v7。
先看v3,v3还没被收录,判断dist[3] = +∞,而dist[V] + E<v,w> = dist[4] + E<4,3> = 1 + 2 =3,是小于+∞的,所以这条路径是当前从v1到v3的最短路。更新dist[3] = 3, path[3] = 4。
再来看v5,同v3的过程:
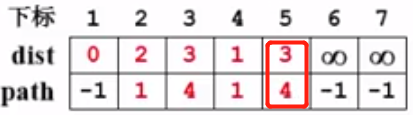
同样处理v6和v7:
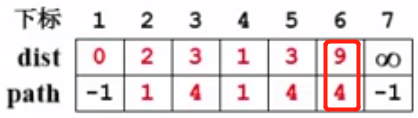

至此,v4的邻接点就处理完毕了。接下来进入下一次循环。
3、未收录顶点中dist最小者,现在是v2,所以标记v2,V = 2,collected[2] = true,对v2的邻接点v4和v5进行处理。
v4:已经被访问过,所以不做处理;
v5:dist[V] + E<v,w> = dist[2] + E<2,5> = 2 + 10 =12 大于dist[W] =dist[5] = 3。所以保持v5的值,不做处理。
至此,v2的邻接点就处理完毕了。进入下一次循环
4、未收录的顶点中dist最小者,这次有两个候选:v3和v5,随便挑一个,选择v3,collected[3] = true。
v3的邻接点:v1和v6。
先看v1:已经访问过。
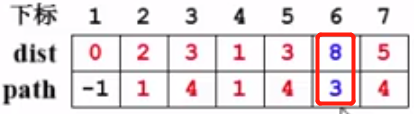
再看v6:当前dist[6] = 9,是从v1->v4->v6; 那么从v3走会怎样呢?从v1到v3(v1->v4->v3)是3,v3->v6是5,所以整个路径的长度为8,比现在的9要小一点。即不等式dist[V] + E<v,w> = dist[3] + E<3,6> = 3+ 5 =8 < dist[6] = 9,所以更新dist[6]和path[6]:
至此,结束了对v3的处理。
5、继续来找未收录顶点中dist最小的,现在是v5,collected[5] = true。
v5的邻接点只有v7。
当前dist[7] = 5;而dist[5] + E<5,7> = 3 + 6 = 9大于5,所以不等式不成立,不做处理。
6、在未收录的结点中还有v6和v7,现在v7的dist较小,所以collected[7] = true。
而v7唯一的邻接点就是v6。
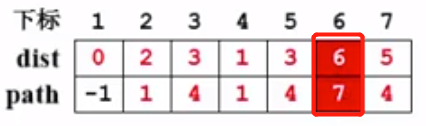
现在dist[6] = 8,而dist[7] + E<7,6> = 5 + 1 = 6小于8,所以不等式成立,更新dist[6]和path[6]:
7、还剩v6没有被收录,collected[6] = true。因为v6没有邻接点,所以不做处理。
8、再找没有被收录的顶点,发现不存在,所以break结束程序。
如果要问v1到v6的最短路径是哪条,处理过程同无向图的处理过程:
(1)从v6开始,发现v7是它的上一个顶点,即最短路径是v7->v6;
(2)跟踪path[7] = 4,即最短路径是从v4->v7;
(3)跟踪path[4] = 1,即是从v1->v4;
(4)跟踪path[1] = -1,即v1是源点。
(5)所以最短路径就是v1->v4->v7->v6。
源码
* 邻接矩阵存储 - 有权图的单源最短路算法 */Vertex FindMinDist( MGraph Graph, int dist[], int collected[] )
{ /* 返回未被收录顶点中dist最小者 */Vertex MinV, V;int MinDist = INFINITY;for (V=0; V<Graph->Nv; V++) {if ( collected[V]==false && dist[V]<MinDist) {/* 若V未被收录,且dist[V]更小 */MinDist = dist[V]; /* 更新最小距离 */MinV = V; /* 更新对应顶点 */}}if (MinDist < INFINITY) /* 若找到最小dist */return MinV; /* 返回对应的顶点下标 */else return ERROR; /* 若这样的顶点不存在,返回错误标记 */
}bool Dijkstra( MGraph Graph, int dist[], int path[], Vertex S )
{int collected[MaxVertexNum];Vertex V, W;/* 初始化:此处默认邻接矩阵中不存在的边用INFINITY表示 */for ( V=0; V<Graph->Nv; V++ ) {dist[V] = Graph->G[S][V];if ( dist[V]<INFINITY )path[V] = S;elsepath[V] = -1;collected[V] = false;}/* 先将起点收入集合 */dist[S] = 0;collected[S] = true;while (1) {/* V = 未被收录顶点中dist最小者 */V = FindMinDist( Graph, dist, collected );if ( V==ERROR ) /* 若这样的V不存在 */break; /* 算法结束 */collected[V] = true; /* 收录V */for( W=0; W<Graph->Nv; W++ ) /* 对图中的每个顶点W *//* 若W是V的邻接点并且未被收录 */if ( collected[W]==false && Graph->G[V][W]<INFINITY ) {if ( Graph->G[V][W]<0 ) /* 若有负边 */return false; /* 不能正确解决,返回错误标记 *//* 若收录V使得dist[W]变小 */if ( dist[V]+Graph->G[V][W] < dist[W] ) {dist[W] = dist[V]+Graph->G[V][W]; /* 更新dist[W] */path[W] = V; /* 更新S到W的路径 */}}} /* while结束*/return true; /* 算法执行完毕,返回正确标记 */
}多源最短路算法
- 方法1:直接将单源最短路算法调用|V|遍
- T = O(|V|³ + |E| x |V|) ------对于稀疏图效果好
- 方法2:

- T = O(|V|³)------对于稠密图效果好
Floyd算法
路径
的最小长度
即给出了 i 到 j 的真正最短距离
- 最初的
是什么?(即初始矩阵)
- 答:定义为邻接矩阵,对角线全是0;i和j之间如果有边,D[i][j]就定义为这条边的权重;没有直接的边相连的时候,D[i][j]初始化为+∞
- 当
已经完成,递推到
时:
- 或者k∉最短路径
- 或者k∈最短路径
- 或者k∉最短路径
算法程序
void Floyd()
{for(i = 0; i < N; i++)for(j = 0; j < N; j++) {D[i][j] = G[i][j];path[i][j] = -1;}for(k = 0;k < N;k++) for(i = 0; i < N; i++)for(j = 0; j < N; j++)if(D[i][k] + D[k][j] < D[i][j]) {D[i][j] = D[i][k] + D[k][j];path[i][j] = k;}}如果要打印i到j的最短路径,那么这个最短路径一定是由"i到k的最短路径 + k + k到j的最短路径"。所以可以递归地打印i到k的路径,把path[i][j]的值打印出来,再递归地打印k到j的路径。
时间复杂度
三重循环,T = O(N³)
源码
/* 邻接矩阵存储 - 多源最短路算法 */bool Floyd( MGraph Graph, WeightType D[][MaxVertexNum], Vertex path[][MaxVertexNum] )
{Vertex i, j, k;/* 初始化 */for ( i=0; i<Graph->Nv; i++ )for( j=0; j<Graph->Nv; j++ ) {D[i][j] = Graph->G[i][j];path[i][j] = -1;}for( k=0; k<Graph->Nv; k++ )for( i=0; i<Graph->Nv; i++ )for( j=0; j<Graph->Nv; j++ )if( D[i][k] + D[k][j] < D[i][j] ) {D[i][j] = D[i][k] + D[k][j];if ( i==j && D[i][j]<0 ) /* 若发现负值圈 */return false; /* 不能正确解决,返回错误标记 */path[i][j] = k;}return true; /* 算法执行完毕,返回正确标记 */
}
这篇关于MOOC 数据结构 | 7. 图(中)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!