本文主要是介绍东芝机械人电池低报警解除与机器人多旋转数据清零,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
今天启动一台设备,触摸屏一直显示机器人报警(翻译过后为电池电量低),更换电池后关机重启后也不能消除,所以打开示教器,下面就来说说怎么解决此项问题(可以参考官方发的手册,已手册为主)。
一,设备
下面来看看机械手的照片与示教器的照片
四轴机械手(六轴机器人有可以)

示教器图片

ENC Batierw low
报警内容显示
二,操作方法
一,编码器复位
操作步骤图说明

示教器操作示范(将控制器打到手动)
一,先将示教器打到手动(点击UTILITY功能键,进入下图界面)

二,点击键盘NEXT(进入功能选项下一个界面)

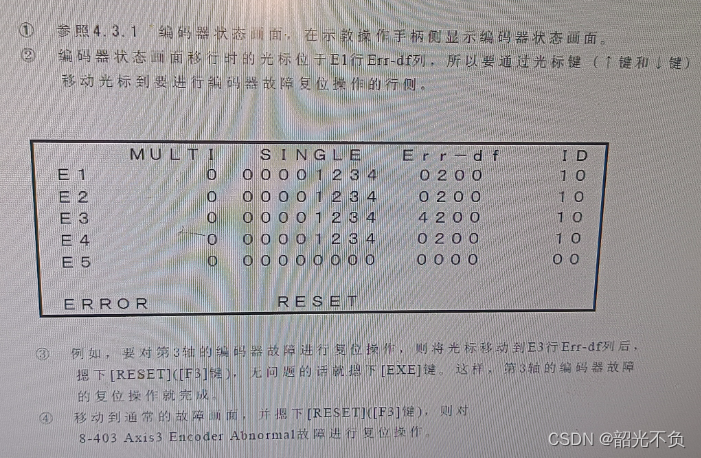
三,进入该界面后,选择ENC(相应键盘选择F5键)

四,进入下面界面后,查看那一个轴不是0000,

五,上下左右键,选择到对应的位置上,点击RESET复位键,进行复位。

六,对应的选择EXE进行确定复位。

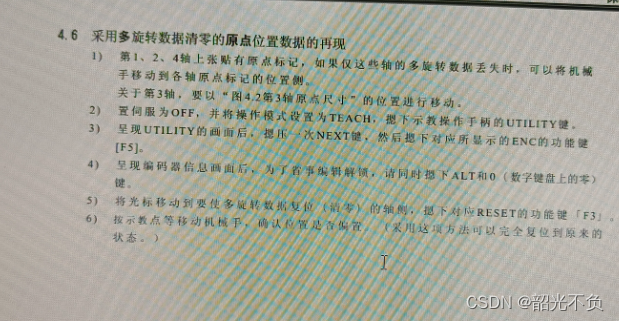
七,手动走一下机器人点位(应该是有差距,需要机器人多旋转数据清零,当清零后,点位还是存在偏差,但是小了许多,还是需要慢慢修改)
机器人多旋转数据清零(复位完后,必须清零,重新调点位)
示教器的手动控制
将控制器·选择手动后,按住ERROR报警界面,选择F3RESET复位键,后报警消失,按住示教器后面的使能键,就可以对机械手进行手动控制。
这篇关于东芝机械人电池低报警解除与机器人多旋转数据清零的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







