本文主要是介绍YOLOv5改进(六)--引入YOLOv8中C2F模块,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
文章目录
- 1、前言
- 2、C3模块和C2F模块
- 2.1、C3模块
- 2.2、BottleNeck模块
- 2.3、C2F模块
- 3、C2F代码实现
- 3.1、common.py
- 3.2、yolo.py
- 3.3、yolov5s_C2F.yaml
- 4、目标检测系列文章
1、前言
本文主要使用YOLOv8的C2F模块替换YOLOv5中的C3模块,经过实验测试,发现YOLOv5更加适合嵌入式设备,所以并不是越新的框架性能就会越好。通常大部分的目标检测模型都是在coco数据集上进行训练,然后再与旧的模型进行比较,如果只看在coco数据集上的表现确实v7、v8是要优于v5的,但是在自己数据集上面训练可能就是另外一种结果,所以可以尝试将不同模型的不同模块进行融合,试一试训练效果。
2、C3模块和C2F模块
2.1、C3模块
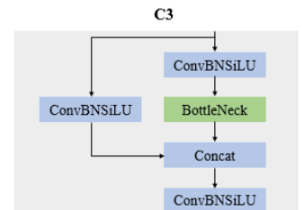
YOLOV5 采用C3模块,类似于残差结构的思想,C3模块由三个CBS模块,也就是三个卷积层,再加上若干个BottleNeck模块构成,输入进来的特征,分为两个部分,一部分特征是只经过CBS模块处理,一部分经过CBS+BottleNeck处理,最后通过concat将两部分特征进行拼接,再经过一个CBS层将特征维度进行恢复。
class C3(nn.Module):# CSP Bottleneck with 3 convolutionsdef __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansionsuper().__init__()c_ = int(c2 * e) # hidden channelsself.cv1 = Conv(c1, c_, 1, 1)self.cv2 = Conv(c1, c_, 1, 1)self.cv3 = Conv(2 * c_, c2, 1) # optional act=FReLU(c2)self.m = nn.Sequential(*(Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)))def forward(self, x):return self.cv3(torch.cat((self.m(self.cv1(x)), self.cv2(x)), 1))
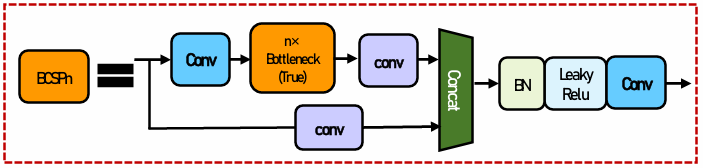
YOLOv5-v6.0版本中使用了C3模块,替代了早期的BottleneckCSP模块。这两者结构作用基本相同,均为CSP架构,只是在修正单元的选择上有所不同,C3模块包含了3个标准卷积层以及多个Bottleneck模块,与BottleneckCSP模块所不同的是,C3经过Bottleneck模块输出后的Conv模块被去掉了。旧版本的yolov5的CSP模块如下:
2.2、BottleNeck模块
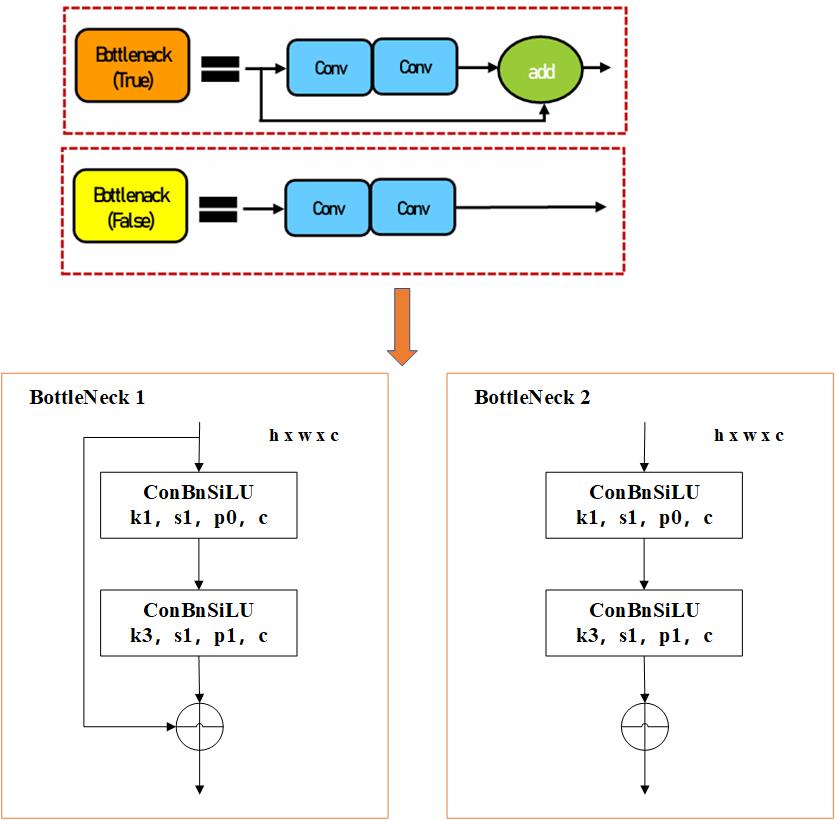
BottleNeck模块是类似与resnet残差结构,该模块其实存在两种形式,也就是BottleNeck1和BottleNeck2,BottleNeck1是以resnet残差结构连接的,该残差结构是由两条路构成,其中一路先进行1×1卷积将特征图的通道数减小一半,从而减少计算量,再通过3×3卷积提取特征,并且将通道数加倍,其输入与输出的通道数是不发生改变的,而另外一路通过shortcut进行残差连接,与第一路的输出特征图相加,从而实现特征融合;BottleNeck2只是经过一次1x1卷积的CBS和一次3x3卷积的CBS。
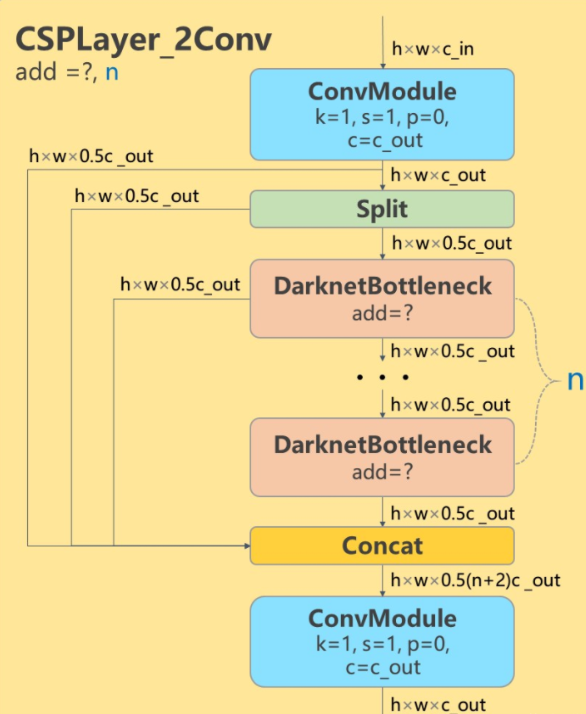
2.3、C2F模块
CBS处理之后的特征首先进行Split分割成两部分特征,一部分特征保留不做任何处理,一部分经过若干个BottleNeck进行处理;其中每个BottleNeck又会分出两条通道,一条是将处理过的特征传递给下一个BottleNeck,一条则是保留下来用作后面的concat连接。最后经过n个BottleNeck之后将所有的特征进行融合。
n个BottleNeck的特征融合方式很像FPN特征金字塔自顶向下融合,将深层特征与浅层特征进行融合 。
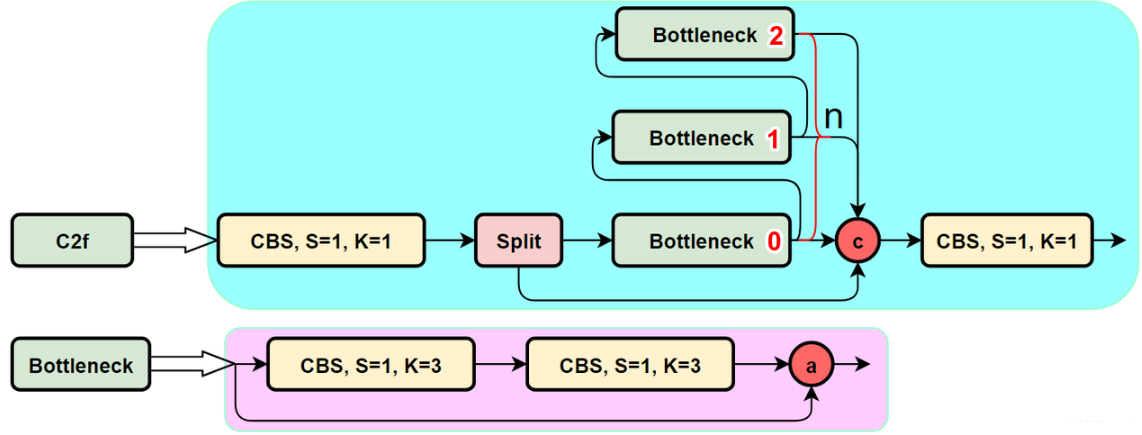
C2f 使用了3个卷积模块(ConV+BN+SILU),以及n个BottleNeck构成输入的特征经过Split之后通道数变为原来的一半(h ∗ w ∗ 0.5cout),一半的特征图不做处理,另外一半则是传入到BottleNeck模块中做特征融合操作,其结构图如下:
3、C2F代码实现
添加C2f和C2F_Bottleneck模块代码,因为YOLOv5和YOLOv8的Bottleneck模块不一致,这里直接拷贝YOLOv8源码的C2f和C2F_Bottleneck模块。
3.1、common.py
在models/common.py的加入C2f和C2F_Bottleneck类
class C2f(nn.Module):"""Faster Implementation of CSP Bottleneck with 2 convolutions."""def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5):"""Initialize CSP bottleneck layer with two convolutions with arguments ch_in, ch_out, number, shortcut, groups,expansion."""super().__init__()self.c = int(c2 * e) # hidden channelsself.cv1 = Conv(c1, 2 * self.c, 1, 1)self.cv2 = Conv((2 + n) * self.c, c2, 1) # optional act=FReLU(c2)self.m = nn.ModuleList(C2F_Bottleneck(self.c, self.c, shortcut, g, k=((3, 3), (3, 3)), e=1.0) for _ in range(n))def forward(self, x):"""Forward pass through C2f layer."""y = list(self.cv1(x).chunk(2, 1))y.extend(m(y[-1]) for m in self.m)return self.cv2(torch.cat(y, 1))def forward_split(self, x):"""Forward pass using split() instead of chunk()."""y = list(self.cv1(x).split((self.c, self.c), 1))y.extend(m(y[-1]) for m in self.m)return self.cv2(torch.cat(y, 1))class C2F_Bottleneck(nn.Module):"""Standard bottleneck."""def __init__(self, c1, c2, shortcut=True, g=1, k=(3, 3), e=0.5):"""Initializes a bottleneck module with given input/output channels, shortcut option, group, kernels, andexpansion."""super().__init__()c_ = int(c2 * e) # hidden channelsself.cv1 = Conv(c1, c_, k[0], 1)self.cv2 = Conv(c_, c2, k[1], 1, g=g)self.add = shortcut and c1 == c2def forward(self, x):"""'forward()' applies the YOLO FPN to input data."""return x + self.cv2(self.cv1(x)) if self.add else self.cv2(self.cv1(x))3.2、yolo.py
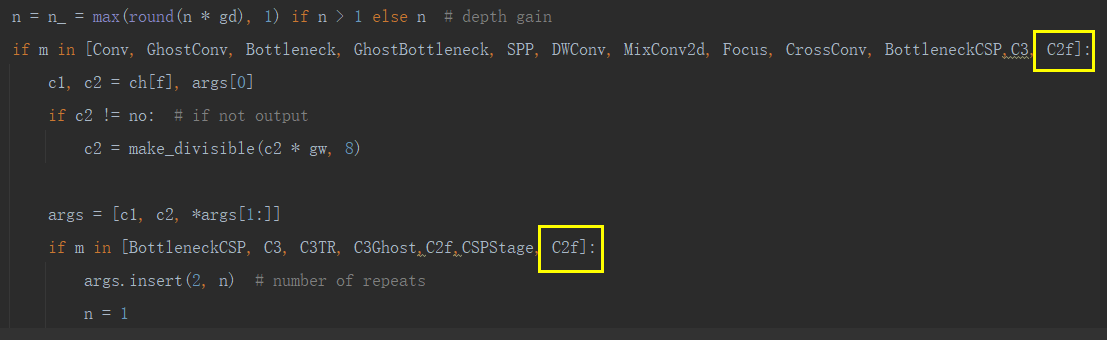
在models/yolo.py的parse_model函数,添加C2f 模块
if m in [Conv, GhostConv, Bottleneck, GhostBottleneck, SPP, DWConv, MixConv2d, Focus, CrossConv, BottleneckCSP,C3, C2f]:
3.3、yolov5s_C2F.yaml
在models文件夹新建一个yolov5s_C2F.yaml文件,将yolov5s所有的C3模块都换成了C2f模块。
# YOLOv5 🚀 by Ultralytics, GPL-3.0 license# Parameters
nc: 6 # number of classes
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.50 # layer channel multiple
anchors:- [ 10,13, 16,30, 33,23 ] # P3/8- [ 30,61, 62,45, 59,119 ] # P4/16- [ 116,90, 156,198, 373,326 ] # P5/32# YOLOv5 v6.0 backbone
backbone:# [from, number, module, args] 输出640*640[ [ -1, 1, Conv, [ 64, 6, 2, 2 ] ], # 0-P1/2 320*320 64表示输出的channel,但是需要乘以width_multiple,6表示卷积核的大小,2表示padding大小,2表示stride大小[ -1, 1, Conv, [ 128, 3, 2 ] ], # 1-P2/4 160*160*128 2表示stride大小[ -1, 3, C2f, [ 128 ] ],[ -1, 1, Conv, [ 256, 3, 2 ] ], # 3-P3/8 80*80*256[ -1, 6, C2f, [ 256 ] ],[ -1, 1, Conv, [ 512, 3, 2 ] ], # 5-P4/16 40*40*512[ -1, 9, C2f, [ 512 ] ],[ -1, 1, Conv, [ 1024, 3, 2 ] ], # 7-P5/32 20*20[ -1, 3, C2f, [ 1024 ] ],[ -1, 1, SPPF, [ 1024, 5 ] ], # 9]# YOLOv5 v6.0 head
head:# ================ 自下向上融合FPN =====================[ [ -1, 1, Conv, [ 512, 1, 1 ] ], # 降维 20*20*1024->20*20*512[ -1, 1, nn.Upsample, [ None, 2, 'nearest' ] ], #上采样 20*20*512->40*40*512[ [ -1, 6 ], 1, Concat, [ 1 ] ], # cat backbone P4 40*40*(512+512)[ -1, 3, C2f, [ 512, False ] ], # 13 40*40*1024->40*40*512[ -1, 1, Conv, [ 256, 1, 1 ] ], #40*40*512->40*40*256[ -1, 1, nn.Upsample, [ None, 2, 'nearest' ] ], # 40*40*256->80*80*256[ [ -1, 4 ], 1, Concat, [ 1 ] ], # cat backbone P3 80*80*(256+256)[ -1, 3, C2f, [ 256, False ] ], # 17 (P3/8-small) 80*80*512->80*80*256# ================ 自上向下融合PAN ==================[ -1, 1, Conv, [ 256, 3, 2 ] ], # 80*80*256->40*40*256[ [ -1, 14 ], 1, Concat, [ 1 ] ], # cat head P4 40*40*(256+256)[ -1, 3, C2f, [ 512, False ] ], # 20 (P4/16-medium)[ -1, 1, Conv, [ 512, 3, 2 ] ], #40*40*(256+256)-> 20*20*512[ [ -1, 10 ], 1, Concat, [ 1 ] ], # cat head P5 20*20*(512+512)[ -1, 3, C2f, [ 1024, False ] ], # 23 (P5/32-large)[ [ 17, 20, 23 ], 1, Detect, [ nc, anchors ] ], # Detect(P3, P4, P5)]
4、目标检测系列文章
- YOLOv5s网络模型讲解(一看就会)
- 生活垃圾数据集(YOLO版)
- YOLOv5如何训练自己的数据集
- 双向控制舵机(树莓派版)
- 树莓派部署YOLOv5目标检测(详细篇)
- YOLO_Tracking 实践 (环境搭建 & 案例测试)
- 目标检测:数据集划分 & XML数据集转YOLO标签
- DeepSort行人车辆识别系统(实现目标检测+跟踪+统计)
- YOLOv5参数大全(parse_opt篇)
- YOLOv5改进(一)-- 轻量化YOLOv5s模型
- YOLOv5改进(二)-- 目标检测优化点(添加小目标头检测)
- YOLOv5改进(三)-- 引进Focaler-IoU损失函数
- YOLOv5改进(四)–轻量化模型ShuffleNetv2
- YOLOv5改进(五)-- 轻量化模型MobileNetv3
这篇关于YOLOv5改进(六)--引入YOLOv8中C2F模块的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!




