本文主要是介绍【ROS2总结】点激光扫描仪数据发布(驱动编写),希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
> 说明:
> 本文首发于 Playfish Blog,转载请保留链接。
前言
在上一篇博客中,介绍了如何 在ROS1下编写激光测距传感器节点,在此基础上我们下面讲述如何在ROS2下编程来创建激光测距传感器节点。
在接下来的博客中将根据本身经验来编写一些ROS相关内容,权当是作为记忆来分享。
ROS2驱动——点激光扫描仪
下面将讲述使用ROS官方未有的传感器来作为样例,我使用的是莱旭光电的CHT-10点激光传感器作为 介绍,首先这款传感器通信协议部分比较简单,基本上打开串口就可以读出数据,在将数据进行转换就可以得到想要的距离,比较方便,免去复杂的部分,对教程也有帮助,毕竟教程主要讲述的是ROS2驱动部分。
为了不妨碍与上一篇的衔接问题,这里我们重新开始从头介绍,大家就可以不用看上一篇博客。
相关ROS2驱动代码可以在github上找到进行下载:https://github.com/Playfish/cht10_node/tree/ros2
CHT-10是点激光,扫描范围是0.05-10m,真实的应该是0.15-10m,10m未测试,不过0.15盲区还是有的。
下图是CHT-10的通信协议部分介绍:
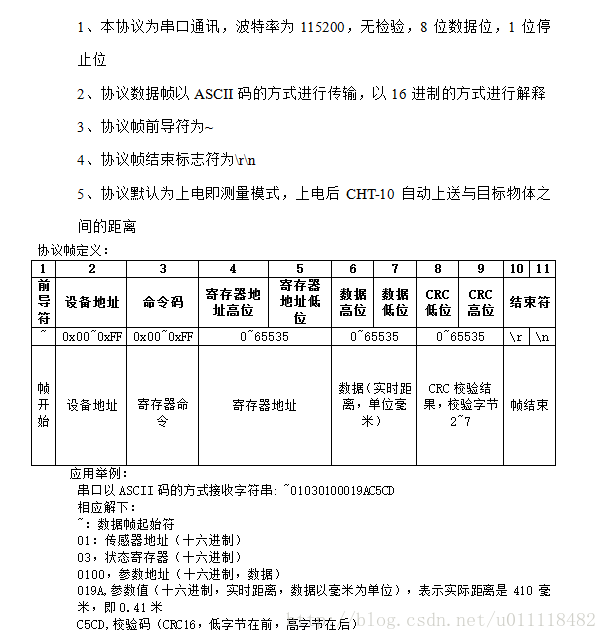
可以看到想要的数据在9~12位(四字节),得到的数据需要除以1000才能得到真实的距离(米),ROS消息中基本单位是米。
### 消息选定
关于选择什么消息作为该传感器的ROS2消息,这个相对来说不是很重要,不过作为通用项来说,尽量向通用靠近(即使用ROS官方消息定义,而不是自己定义消息)。目前激光消息的话,有两个选择,第一个是sensor_msgs/LaserScan消息类型,不过该消息类型适合有角度的传感器,即180°或360°的2D雷达或激光,而目前使用的激光是单点类型,和激光笔差不多,只有一个点,那么可以选择sensor_msgs/Range消息类型,该消息类型适用于超声波传感器、红外传感器单点类型,CHT-10就用这个类型。
注意:在ROS2中,头文件将采用<消息包>/<通信机制>/消息名称.hpp形式,拿本教程为例,
| ROS1 | ROS2 |
| sensor_msgs/Range.h | sensor_msgs/msg/range.hpp |
关于该ROS2消息,官方暂未提供API文档,大家可以查看该文件来查看API,基本语法与ROS1一致。
准备工作
传感器选型选定、通信消息选定,那么接下来还需要做:
- Frame_id:Frame在ROS1中作用至关重要,消息将和TF绑定才可以读取数据,在这里作为通用可配置,暂定内容为:laser,用户可自定义设置(通过ROS2 Parameters设置)。
- 串口:避免和其他传感器串口冲突,因此在这里预留出一个串口设置参数,用户可以自定义设置(通过ROS2 Parameters设置)。
- 话题:消息内容需要通过话题发布,并且话题需要唯一,不然容易崩溃,在这里选择话题为“range”
当然以上部分可以不考虑,这个是作为通用型需要考虑的,暂时可以先忘记以上部分,下面开启代码部分
测试代码编写
在这部分,主要先编写测试代码,如果测试代码无问题,就可以写到node中,测试代码和ROS无关系,只是通过串口读取数据,并且在终端显示出来,整体思路如下:
传感器选择 -> 测试程序测试(类似串口助手) -> ROS2 node绑定(将测试程序读取部分加入到ROS2中)
下面是测试程序部分,也可以在cht10_node/test中找到,名为 test_cht10.cpp:
#include <string>
#include <cht10_node/serial_func.hpp>
#include <cstdlib>#include <iostream>
#include <stdint.h>
#define BUFSIZE 17int main(int argc, char** argv){cht10_serial_func::Cht10Driver cht10driver_;std::string serialNumber_;serialNumber_ = "/dev/ttyUSB0";int baudRate_ = 115200;std::stringstream ostream;int fd, len, rcv_cnt;bool success_flag;char buf[40], temp_buf[BUFSIZE],result_buf[BUFSIZE];unsigned int laser_data=0;char data_buf[4];rcv_cnt = 0;success_flag = false;memset(buf, 0xba, sizeof(buf));memset(temp_buf, 0xba, sizeof(temp_buf));memset(result_buf, 0xba, sizeof(result_buf));fd = open(serialNumber_.c_str(), O_RDWR | O_NOCTTY | O_NDELAY );if(fd < 0){std::cout<<"Open Serial: "<<serialNumber_.c_str()<<" Error!";exit(0);}cht10driver_.UART0_Init(fd,baudRate_,0,8,1,'N');while(1){len = cht10driver_.UART0_Recv(fd, buf,40);if(len>0){for(int i = 0; i < len; i++){if(rcv_cnt<=BUFSIZE){ result_buf[rcv_cnt++] = buf[i];if(rcv_cnt == BUFSIZE){success_flag = true;}}//end ifelse{/***** checkout received data*/success_flag = false;for(int count = 0; count < 4; count++){data_buf[count] = result_buf[9+count];}sscanf(data_buf, "%x", &laser_data);std::cout<<"sensor data:"<<laser_data<<", Distance: "<<(double)laser_data/1000<<std::endl;/***** data writing end*/if('~' == buf[i]){rcv_cnt = 0;result_buf[rcv_cnt++] = buf[i];}}//end else}//end for }}
}
我将串口部分封装成一个类名为Cht10Driver,该类包含串口读/写部分、初始化。
通过使用 ament build可以得到一个名为 test_cht10的可执行文件,使用 ./test_cht10可以运行,将CHT-10插入到电脑上,并且电脑只有一个ttyUSB0,就可以读取数据,数据将显示为sensor data: 传感器毫米数据, Distance: 传感器米数据。
ROS2驱动编写
上部分讲述了测试程序编写,主要作用是通过串口读取传感器数据,那么得到传感器数据之后,就可以将传感器数据填充到ROS消息中,然后通过话题形式发布出去,如下是将传感器数据填充到ROS消息并生成节点的主要部分:
完整代码可以查看: cht10_node.cpp
/*** @file /cht10_node/src/cht10/cht10_node.cpp** @brief Implementation for dirver with read data from Cht10 nodelet** @author Carl***//******************************************************************************* Includes*****************************************************************************/
#include <chrono>
#include <cstdio>
#include <memory>
#include <string>#include <rclcpp/rclcpp.hpp>
#include <rcutils/logging_macros.h>#include <functional>#include <std_msgs/msg/string.hpp>
#include <sensor_msgs/msg/range.hpp>#include <cht10_node/cht10_node.h>#define ROS_ERROR RCUTILS_LOG_ERROR
#define ROS_INFO RCUTILS_LOG_INFO
#define ROS_ERROR_THROTTLE(sec, ...) RCUTILS_LOG_ERROR_THROTTLE(RCUTILS_STEADY_TIME, sec, __VA_ARGS__)using namespace cht10_serial_func;Cht10Func::Cht10Func(rclcpp::Node::SharedPtr & node):node_(node),
serialNumber_("/dev/USB0"),
frame_id("laser"){msg_ = std::make_shared<sensor_msgs::msg::Range>();scan_pub_ = node_->create_publisher<sensor_msgs::msg::Range>("range");parameter_service_ = std::make_shared<rclcpp::ParameterService>(node_);node_->get_parameter("serialNumber", serialNumber_);node_->get_parameter("baudRate", baudRate_);node_->get_parameter("frame_id", frame_id);rcv_cnt = 0;success_flag = 0;fd = open(serialNumber_.c_str(), O_RDWR | O_NOCTTY | O_NDELAY );if(fd < 0){ROS_ERROR("Open Serial: %s Error!",serialNumber_.c_str());exit(0);}memset(buf, 0, sizeof(buf));memset(temp_buf, 0, sizeof(temp_buf));memset(result_buf, 0, sizeof(result_buf));Cht10driver_.UART0_Init(fd,baudRate_,0,8,1,'N');ROS_INFO("Open serial: [ %s ], successfully, with idex: %d.", serialNumber_.c_str() ,fd);update();}Cht10Func::~Cht10Func(){}double Cht10Func::data_to_meters(unsigned int &data, int scale){return (double)data/scale;}void Cht10Func::publish_scan(double nodes, builtin_interfaces::msg::Time start,std::string frame_id){float final_range;std::shared_ptr<sensor_msgs::msg::Range> range_msg;range_msg->field_of_view = 0.05235988;range_msg->max_range = 10.0;range_msg->min_range = 0.05;range_msg->header.frame_id = frame_id;range_msg->radiation_type = sensor_msgs::msg::Range::INFRARED;if(nodes > range_msg->max_range){final_range = std::numeric_limits<float>::infinity();}else if(nodes < range_msg->min_range){final_range = -std::numeric_limits<float>::infinity();}else{final_range = nodes;}range_msg->header.stamp = start;range_msg->range = final_range;scan_pub_->publish(range_msg);}bool Cht10Func::get_scan_data(){len = Cht10driver_.UART0_Recv(fd, buf,40);if(len>0){for(int i = 0; i < len; i++){if(rcv_cnt<=BUFSIZE){ result_buf[rcv_cnt++] = buf[i];if(rcv_cnt == BUFSIZE){success_flag = true;}}//end ifelse{/***** checkout received data*/success_flag = false;for(int count = 0; count < 4; count++){data_buf[count] = result_buf[9+count];}sscanf(data_buf, "%x", &laser_data);//std::cout<<"sensor data:"<<laser_data<<std::endl;/***** data writing end*/if('~' == buf[i]){rcv_cnt = 0;result_buf[rcv_cnt++] = buf[i];}}//end else}//end for }return success_flag;}void Cht10Func::update(){rcv_cnt = 0;success_flag = 0;laser_data = 0;memset(buf, 0, sizeof(buf));memset(temp_buf, 0, sizeof(temp_buf));memset(result_buf, 0, sizeof(result_buf));ROS_INFO("Begin receive data from %s, with idex: %d.",serialNumber_.c_str(),fd);fd = open(serialNumber_.c_str(), O_RDWR | O_NOCTTY | O_NDELAY );Cht10driver_.UART0_Init(fd,baudRate_,0,8,1,'N');// Create a function for when messages are to be sent.auto publish_message =[this]() -> void{
// start_scan_time =rclcpp::Time(start_scan_time);success_flag = get_scan_data();//Send datapublish_scan(data_to_meters(laser_data,SCALE),start_scan_time, frame_id);countSeq++;};ROS_INFO("Shotdown and close serial: %s.", serialNumber_.c_str());Cht10driver_.UART0_Close(fd);// Use a timer to schedule periodic message publishing.timer_ = node_->create_wall_timer(300ms, publish_message);}
其中get_scan_data()函数,就是测试代码内容,得到数据后将数据发送到publish_scan()函数中,就可以发布传感器数据了。
编写可执行程序节点,创建名为cht10_node_ros.cpp,内容为:
#include <cht10_node/cht10_node.h>int main(int argc, char * argv[])
{// Initialize any global resources needed by the middleware and the client library.// You must call this before using any other part of the ROS system.// This should be called once per process.rclcpp::init(argc, argv);// Create a node.rclcpp::Node::SharedPtr node = rclcpp::Node::make_shared("cht10_node");cht10_serial_func::Cht10Func cht(node);// spin will block until work comes in, execute work as it becomes available, and keep blocking.// It will only be interrupted by Ctrl-C.rclcpp::spin(node);rclcpp::shutdown();return 0;
}测试
代码完成后,按照格式进行编写CMakeList、package文件,运行catkin_make就可以得到名为cht10_node.so动态库,运行驱动节点,命令如下:
ros2 run cht10_node cht10_node_ros 使用ros2 topic echo /range就可以得到传感器的ROS2消息内容,包括传感器距离。
目前ROS2功能还未完全开发完毕,一些图形化还需借助ROS1来完成。
这篇关于【ROS2总结】点激光扫描仪数据发布(驱动编写)的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!






