本文主要是介绍Marin说PCB之如何在主板上补偿链路中的走线的等长误差?,希望对大家解决编程问题提供一定的参考价值,需要的开发者们随着小编来一起学习吧!
一场雨把我困在这里,你冷漠地看我没有穿雨衣淋成落汤鸡。今天刚刚出门时候看天气预报没有雨,于是我就没有带雨衣骑电动车去公司了,谁知道回来的路上被淋成狗了。天气预报就像是女人的脾气那样,不能完全相信的。

好了,我们言归正传了,这期文章是给大家分享一下我之前设计的一个单板上如何在主板上补偿MIPI走线的等长误差值,各位帖子们打起精神来了,下面就是本期的内容解析了。
小编我之前做的一个单板是主板,扣板是一个相机模组给我司的印度分部的阿三同事做了。主板上的SOC手册上MIPI线长的要求是建议小于10英寸,这个10英寸的数值其实是指示整个MIPI走线是包含了相机的部分加上主板上的MIPI走线的长度的。
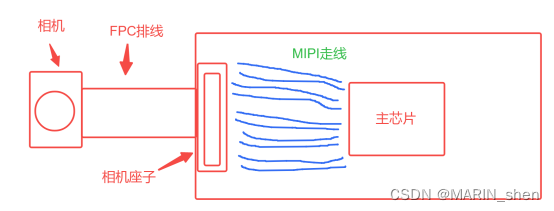
由于相机那边的单板设计的是软硬结合板子,如下图所示:

由于单板的设计交期比较紧张,而且阿三他们那边在设计的时候说单板上是没有空间单独给MIPI线绕等长了。我们从芯片手册的要求可以得知:
- The length difference between the true signal and the complementary signal of the differential pair are within ±1 ps ,The delay difference of DATA from CLK are within +/-10 ps 。
这个上面的+/-10PS,我们可以按照以往的设计经验就是:1PS=6MIL去计算的,若要使详细的知道其中原因可以看下面的解释:
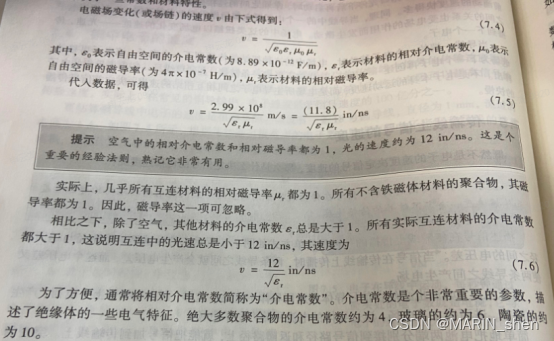
若是我们把介电常数按照4来算,其公式就是:
V=12/√4=6in/ns,换算一下单位后就是6MIL/PS。
上面这个不是我们本期内容的重点啊,我们本期主要讲解的是如何在我们主板上面把对接板子上面的走线的等长误差补上,我i这边给大家分享一下我之前的设计经验。
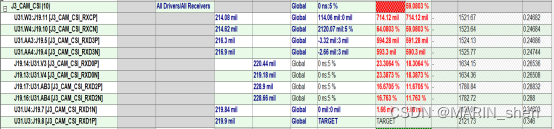
1,首先拿到对插器件上的MIPI走线的长度,数据如下图所示:
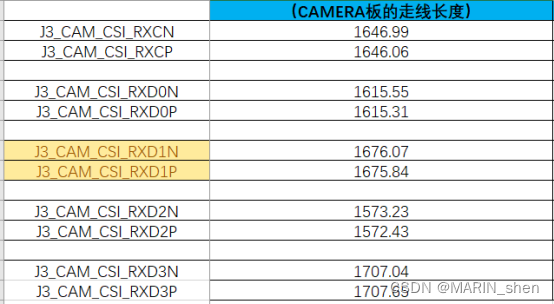
从上面的表格中我们可以得知这组BUS线中国RX_D1这对走线是最长的了,不过好在所有MIPI项的N和P的等长都已经做好了。
2,把我们的单板上的MIPI走线的长度也提去出来到表格中,最好也是先把所有MIPI走线上的N和P的等长都已提前做好。(总的链路上差分线上N和P的误差是+-1PS的,分支上做严格一些,尽量主板上按照+-0.5PS,软硬结合板子(相机模组)上的也是+-0.5PS,当然你要是能够做的更加严格就更好了)。
3,把相机模组上的MIPI走线的长度和主板上的连接器和主芯片上的MIPI走线的长度都换算成走线的延时。
其中相机模组上的MIPI走线的长度我是按照6MIL/PS来计算的,主要原因是MIPI走线主要都是用微带线布线的,介电常数我就按照Er值为4来算了。

但是我们主板上的MIPI走线主要是在ART08层,层叠信息如下所示:

由于ART08层走线的参考平面是GND07和GND09这两个层,通过板厂那边提供的层叠,我们找到了其对应的ER值,我们去找到这两个参考面的平均ER值就好,然后把这个ER平均值带入上面的公式中:v=12/√ER平均,最后得出的值为5.5MIL/PS来计算的。

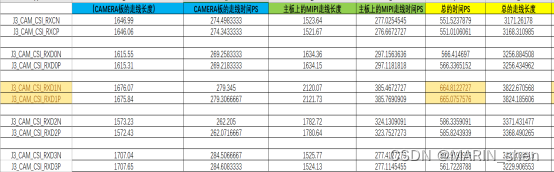
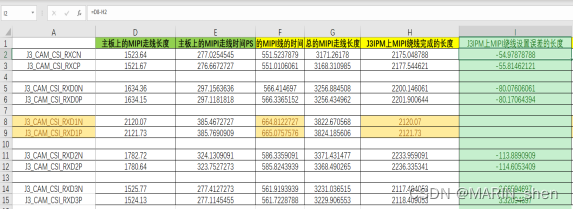
最后我们可以得出一个总的MIPI线的延时和走线长度的表格:

通过这个表格我们可以得知目前整理系统链路上MIPI线走线最长的就是J3_CAM_CSI_RXD1这组MIPI线了。通常的MIPI—BUS我们都是把MIPI-CLK作为基准线,通过把最长线先去缩短再去绕这组BUS的等长的,我们可以先把表格中的MIPI-CLK(J3_CAM_CSI_RXC)这组线和MIPI-DATA1(J3_CAM_CSI_RXD1)总的走线差值算出来,其他的数据线以是以此类推,表格数据如下所示:
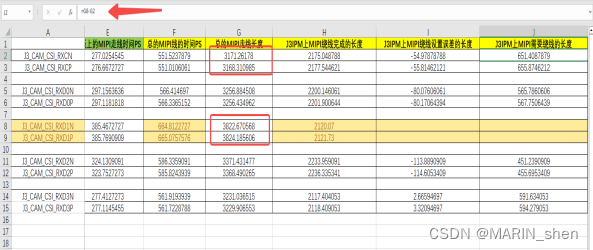
那我们主板上的MIPI线绕线完成的长度应该是多少呢,其实就是之前的绕完差分对N和P的的误差后的MIPI线长度加上上图中需要绕线的长度,总的就是我们主板上实际绕线完成后的长度了。
好了既然我们已经知道了我们主板上的MIPI需要绕线完成后的总的长度是多少了,那我们的主板上MIPI线等长规则改如何设置呢?

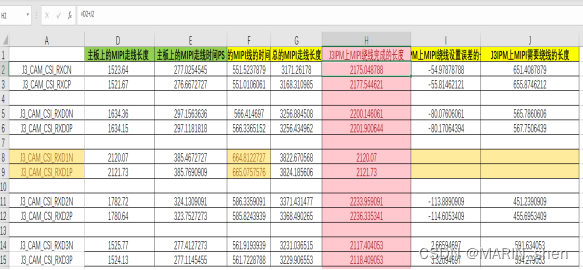
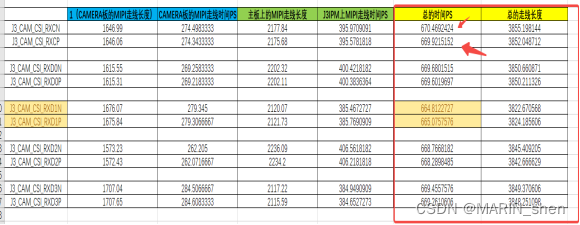
从上面的表格中我们可以得知J3_CAM_CSI_RXD1这组MIPI线是最长的,我们就可以拿这个线作为基准,来算出我们J3IPM上MIPI绕线设置误差的长度了。
最后我们把主板上绕线完成的走线长度整理到表格中,通过表格可以看出来目前的MIPI走线的设计是满足手册上的要求的。
我之前有一个想法就是能不能给把之前主板上的MIPI线需要绕线的长度通过PIN_DELAY表格导入进来再去绕线呢?,这个道理其实和上面的做法是差不多的,主要的区别就是一个把误差值在规则中直接加上了,另外一个是把误差是体现在pin_delay中了。
以上就是本期的所有内容了,我们下期节目不见不散了,最后看完记得帮忙点赞收藏加关注哦,谢谢。

这篇关于Marin说PCB之如何在主板上补偿链路中的走线的等长误差?的文章就介绍到这儿,希望我们推荐的文章对编程师们有所帮助!







