agx专题

Jetson AGX Xavier避坑指南(三)——环境搭建1.(python3、pip、virtualenv、ros)_转载
原文网址如下:https://blog.csdn.net/zxxxiazai/article/details/103419986
在NVIDIA Jetson AGX Orin中使用jetson-ffmpeg调用硬件编解码加速处理
目录 1 build and install library 1.1 报错 Cannot found LIB_NVBUF 2 patch ffmpeg and build 参考文献: 1 build and install library git clone https://github.com/Keylost/jetson-ffmpeg.gitcd jetson-ffmpe

NVIDIA Jetson AGX Orin源码编译安装CV-CUDA
目录 1 下载源码并配置 2 编译安装CV-CUDA 2.1 安装相应依赖包 2.2 升级gcc到gcc-11 2.3 build 2.4 升级cmake 2.5 再次build 2.5.1 报错 /usr/include/c++/11/bits/std_function.h:435:145: error: parameter packs not expanded with ‘.

nvidia系列教程-AGX-Orin RS422开发记录
目录 前言 一、背景介绍 二、原理图连接 三、设备树配置 四、串口422调试 总结 前言 NVIDIA AGX Orin是一款强大的嵌入式计算平台,专为自动驾驶、机器人和高性能边缘计算设计。它不仅具备强大的计算能力,还支持多种通信接口,如I2C、SPI、UART等。在本次开发中,我们将重点讨论如何在AGX Orin上实现RS422通信,
Jetson AGX Orin基于BlueZl蓝牙协议栈AOJ红外蓝牙体温计开发(低功耗蓝牙ble)
一、准备工作 安装blueZ以及相关的蓝牙测试工具: sudo apt updatesudo apt install bluezsudo apt install bluez-hcidump 然后看下蓝牙设备是否识别到,已经是否处于开启状态: root@test-desktop:~# hciconfig -ahci0: Type: Primary Bus: USBBD Addr

【AGX】Ubuntu20.04 + ROS_ noetic+ 大疆Mid360激光 雷达评测
大家好,我是虎哥,最近组装机器人,使用到了大疆孵化的圳市览沃科技有限公司(简称Livox览沃科技)推出的觅道系列全新混合固态激光雷达Mid-360,顺便试试效果,也记录一下使用入门过程。 "觅道Mid-360激光"是大疆公司推出的一款激光雷达传感器。该传感器主要用于飞行器或其他机器人的导航和避障。Mid-360激光雷达采用激光束扫描技术,能够快速而精确地探测周

8.Jetson AGX Orin Ubuntu20.04 gRPC编译安装
Jetson AGX Orin Ubuntu20.04 gRPC编译安装 一、CMake版本检查 grpc编译cmake要求最低版本为3.15。首先,cmake -version 查看当前cmake版本,如果低于3.15,按照以下步骤进行安装。 1.1 卸载已经安装的旧版的CMake sudo apt-get autoremove cmake 1.2 下载最新版本CMake CMak
Jetson AGX ORIN 配置 FGVC-PIM 神经网络(包含 arm64 下面 torch 和 torchvision 配置内容)
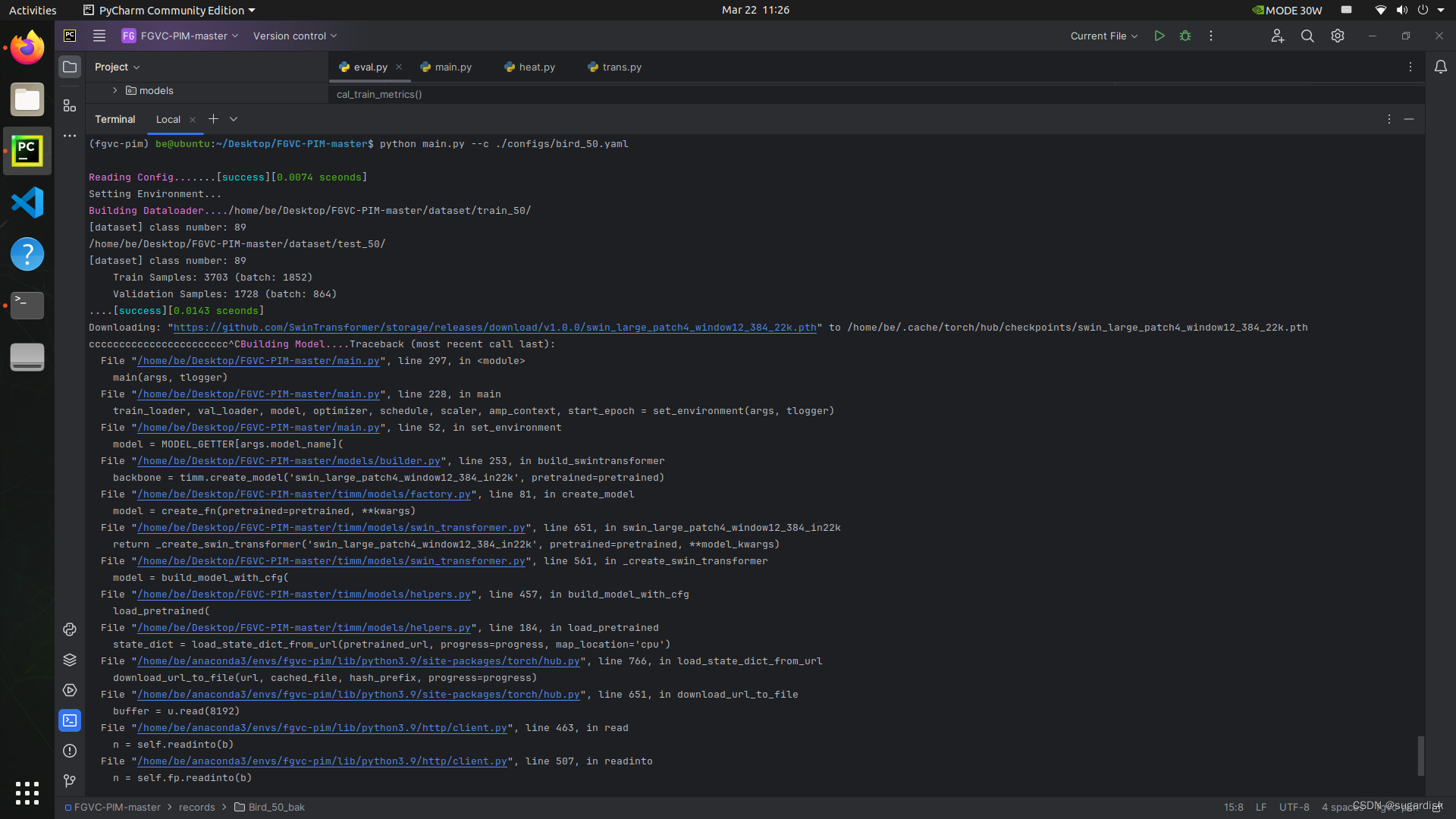
Jetson AGX ORIN 配置 FGVC-PIM 神经网络 文章目录 Jetson AGX ORIN 配置 FGVC-PIM 神经网络配置 ORIN 环境创建 FGVC-PIM 虚拟环境安装 PyTorch安装 torchvision安装其他依赖包 配置 ORIN 环境 首先先配置 ORIN 的环境,可以参考这个链接: Jetson AGX ORIN 初始化&配置C
Jetson AGX ORIN 配置 FGVC-PIM 神经网络
Jetson AGX ORIN 配置 FGVC-PIM 神经网络 文章目录 Jetson AGX ORIN 配置 FGVC-PIM 神经网络配置 ORIN 环境创建 FGVC-PIM 虚拟环境安装 PyTorch安装 torchvision安装其他依赖包 配置 ORIN 环境 首先先配置 ORIN 的环境,可以参考这个链接: Jetson AGX ORIN 初始化&配置C
Jetson AGX Orin安装Anaconda,Cuda,Cudnn,pytorch,Tensorrt,ROS
Anaconda:https://repo.anaconda.com/archive/ Cuda:https://forums.developer.nvidia.com/t/pytorch-for-jetson/72048 1:安装Anaconda3 下载:Anaconda3-2021.11-Linux-aarch64.sh chmod +x Anaconda3-2021.11-Linux-
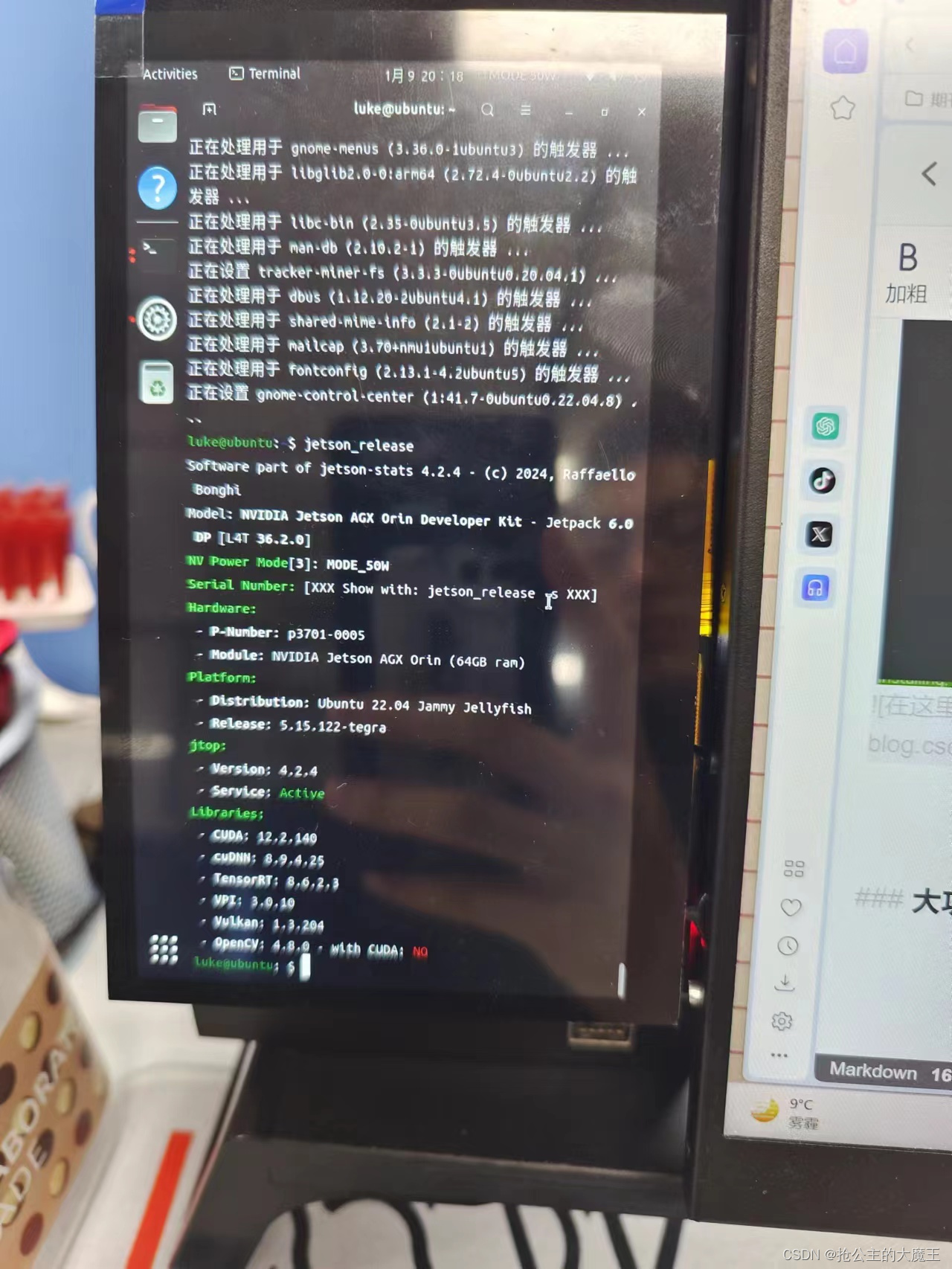
Jetson Orin AGX 64GB更新 Jetpack6.0
Jetson Orin AGX 64GB更新 Jetpack6.0 注意: 1,如果你要向我一样为AGX更新Jetpack6.0的话,它还要求你的ubuntu版本必须是20.04 或22.04 2,安装完SDKmanager后,然后选择对应的设备,根据个人选择勾选是否安装DeepStream 3,可以使用虚拟机也可以使用实体机,使用虚拟机需要在step1中不勾选Host Machine 3,st
Nvidia Jetson AGX Orin使用CAN与底盘通信(ROS C++ 驱动)
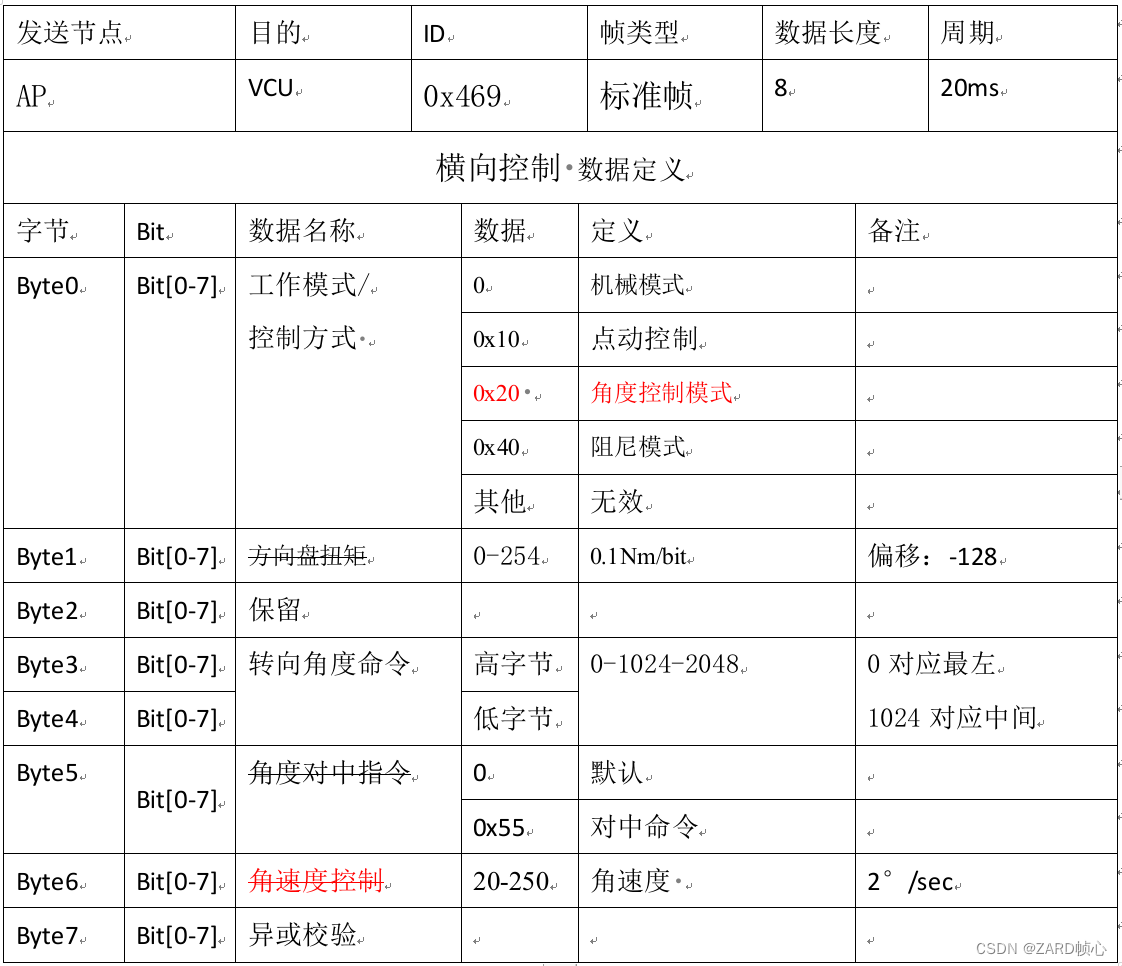
文章目录 一、Nvidia Jetson AGX Orin使用CAN通信1.1 CAN使能配置修改GPIO口功能1.2 can收发测试 二、通过CAN协议编写CAN的SocketCan ROS1驱动程序2.1 通讯协议2.2 接收数据节点2.3 发送数据节点2.4 功能包配置 三、ROS2驱动程序 一、Nvidia Jetson AGX Orin使用CAN通信 参考:http
Jetson AGX Xavier 正确上手教程
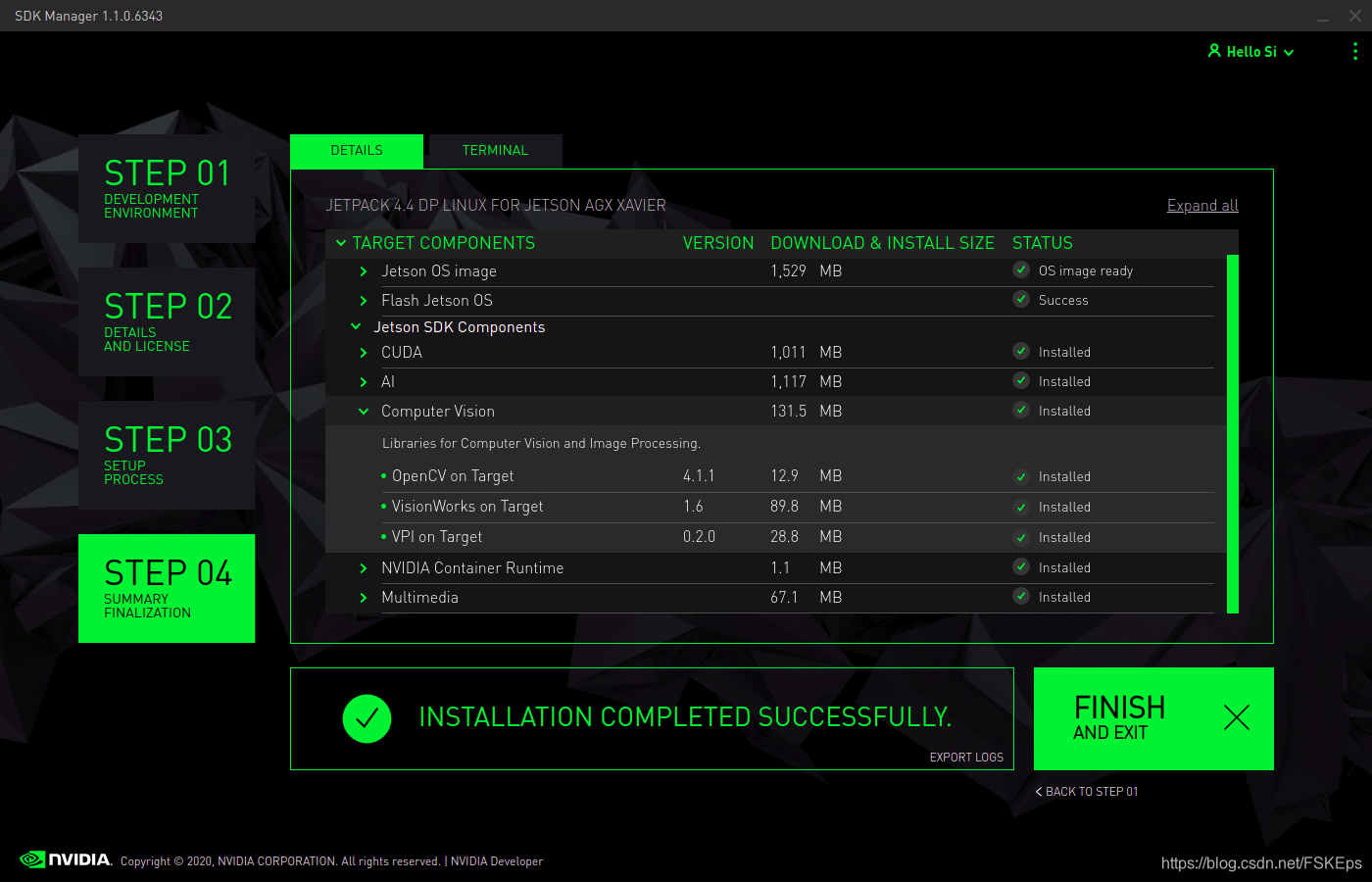
概览 1. 开机1.1 配件1.2 需要准备的器材1.3 连接设备 2. 刷机2.1 更换主机的 apt-get 源2.2 在主机上安装 SDK ManagerStep 1Step 2Step 3烧录 OS 镜像安装 SDK 组件 拿到一个新开箱的 Jetson AGX Xavier 后,首先需要做两件事情: (1)开机,满足基本使用 (2)刷机,满足深度学习相

Jetson AGX XAVIER刷机时提示invalid_request - Authorization flow not allowed
我下的版本是sdkmanager_1.9.2-10899_amd64.deb,安装后后直接在terminal输入 sdkmanager,出来后提示登录有问题,跳到浏览器链接 http://localhost:8080/?error_description=Authorization+flow+not+allowed&state=http://localhost:41369&error=inva
NVIDIA Jetson AGX Xavier 硬盘挂载,扩展 /home 主目录
刷机之后的 Xavier 磁盘空间会被占用一半以上,如果不进行空间扩展,会影响我们后续使用。因此,Xavier 刷机后,首先要进行的重要操作便是硬盘挂载,空间扩展后进行软件数据安装。 目录 1. 查看挂载信息 2. 查看硬盘分区信息 3. 对硬盘进行分区 4. 格式化分区 5. 挂载临时目录 6. 替换系统原 /home 主目录 7. 设置开机自动挂载 8. 重启,完成挂载
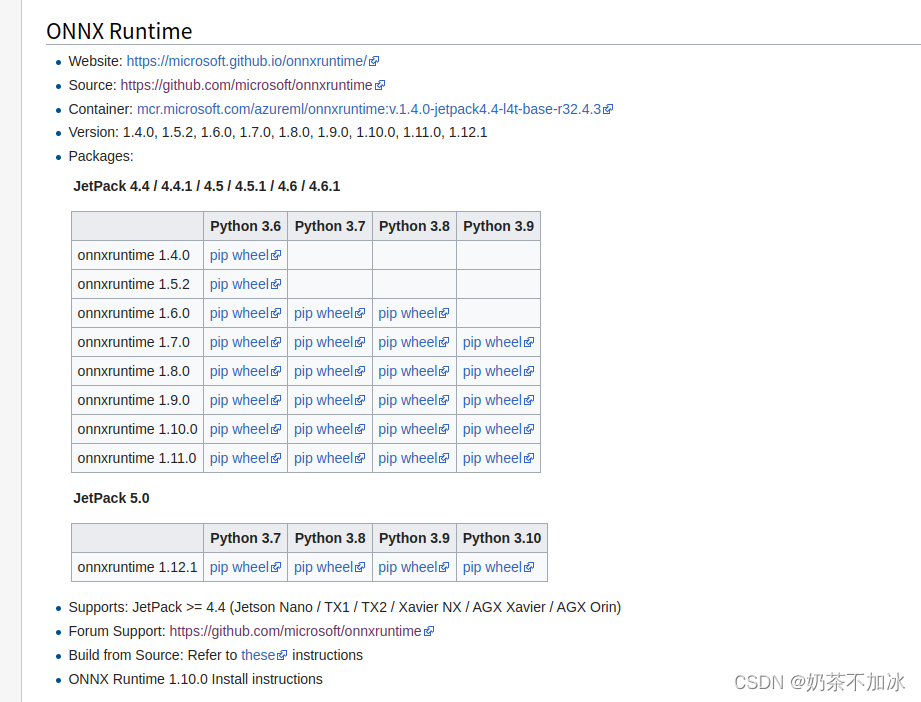
pycocotools,onnxRuntime_gpu 在jetson(Orin,AGX,Xavier NX,nano,TX1,TX2)边缘端硬件通用安装方法
jetson(Orin,AGX,Xavier NX,nano,TX1,TX2)边缘端硬件pycocotools,onnxRuntime_gpu通用安装方法 1. pycocotools 安装 ERROR: Could not build wheels for pycocotools, which is required to install pyproject.toml-based proje

『Nvidia Jetson AGX Xavier笔记』Xavier(arrch64架构)搭建second点云目标检测环境!
Xavier(基于arrch64架构)搭建second点云目标检测环境! 文章目录 一. 事先准备工作1.1. 安装cmake1.2. 创建second虚拟环境1.3. 安装一些依赖包 二. 安装pytorch以及spconv2.1. 安装pytorch以及torchvision2.2. 安装spconv2.3. 安装apex 三. second网络验证性能3.1. 性能测试3.2. 报
海康相机调用 agx
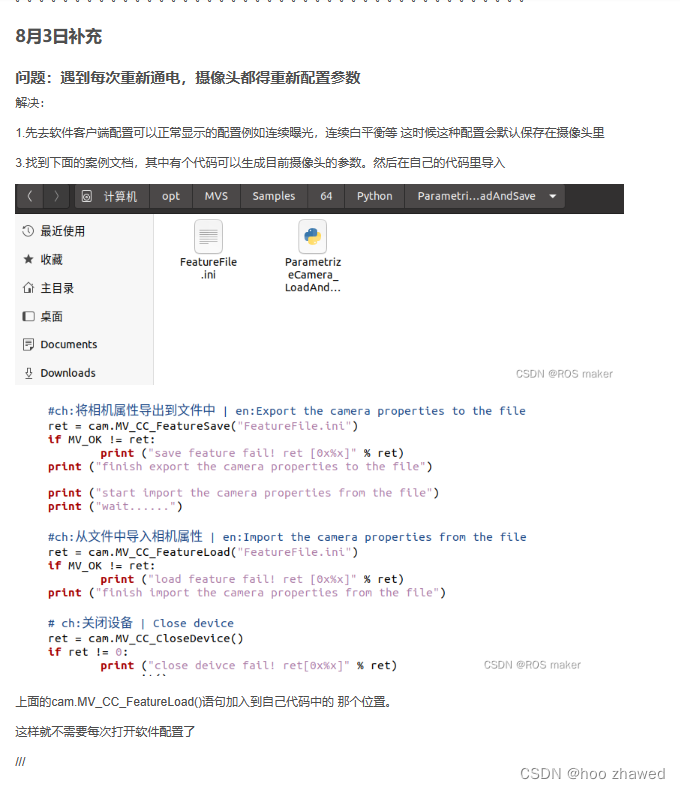
1. 参考链接: 海康工业摄像头调用(linux基于python和opencv)_海康摄像头 linux_ROS maker的博客-CSDN博客海康工业摄像头python linux调用https://blog.csdn.net/qq_41707090/article/details/126124578?spm=1001.2101.3001.6650.2&utm_medium=distribut

Jetson AGX Orin安装Anaconda、Cuda、Cudnn
目录 一、安装Anaconda 二、conda换源 三、Cuda、Cudnn安装 四、jtop 安装 五、查看安装情况 六、cuDNN环境配置 七、pytorch安装 八、安装torchvision 九:Tensorrt安装 拿到一台Jetson AGX Orin,准备搭建AI环境,搭建过程中参考不少文章,也踩了不少坑,特此记录一下。 一、安装Anaconda 清华镜像

【nvidia agx orin 使用保姆级教程】
nvidia agx orin 使用保姆级教程 开发板相关开机与配置显示问题加装固态硬盘安装Jtop安装ros和dockeranaconda和ros的python冲突 fast-lio相关1. 安装rslidar_sdk1.1 准备1.2 安装依赖:1.3 编译安装1.4 在线连接并显示点云 2. 编译安装livox_sdk(代码所需,实际不用)和fast-lio2.1 安装livox的sd
使用Jetson AGX Orin进行口罩识别
在 https://gitee.com/gpus/maskDetection_jetson 代码仓有个口罩识别的案例,我们来看看能不能在Jetson AGX Orin上搞定。 先将该代码仓fork到自己的代码仓(以便魔改) 回到自己的代码仓: 根据README.md来操作吧! 首先需要下载darknet框架并安装,但是众所周知,github不是很友好。 所以还是把
大模型部署手记(4)MOSS+Jetson AGX Orin
1.简介 组织机构:复旦大学 代码仓:GitHub - OpenLMLab/MOSS: An open-source tool-augmented conversational language model from Fudan University 模型:fnlp/moss-moon-003-sft-int4 下载:https://huggingface.co/fnlp/moss-moo