675专题

【图像加密】基于matlab行列像素置乱+DWT图像加密【含Matlab源码 675期】
⛄一、获取代码方式 获取代码方式1: 完整代码已上传我的资源:【图像加密】基于matlab行列像素置乱+DWT图像加密【含Matlab源码 675期】 点击上面蓝色字体,直接付费下载,即可。 获取代码方式2: 付费专栏Matlab图像处理(初级版) 备注: 点击上面蓝色字体付费专栏Matlab图像处理(初级版),扫描上面二维码,付费29.9元订阅海神之光博客付费专栏Matlab图像处理(初级
【刷题】675. 为高尔夫比赛砍树
文章目录 题目思路解题python实现golang实现 复杂度总结 题目 leetCode链接:https://leetcode.cn/problems/cut-off-trees-for-golf-event/ 为高尔夫比赛砍树 你被请来给一个要举办高尔夫比赛的树林砍树。树林由一个 m x n 的矩阵表示, 在这个矩阵中: 0 表示障碍,无法触碰1 表示地面,可以行走
LeetCode每日一题(2022/5/23)675. 为高尔夫比赛砍树(困难)
675. 为高尔夫比赛砍树https://leetcode.cn/problems/cut-off-trees-for-golf-event/ 你被请来给一个要举办高尔夫比赛的树林砍树。树林由一个 m x n 的矩阵表示, 在这个矩阵中: 0 表示障碍,无法触碰 1 表示地面,可以行走 比 1 大的数 表示有树的单元格,可以行走,数值表示树的高度 每一步,你都可以向上、下、左、右四个方向之一移
leetcode-675:为高尔夫比赛砍树 (最短路径算法bfs,dijkstra,A*)
leetcode-675:为高尔夫比赛砍树 (最短路径算法bfs,dijkstra,A*) 题目解题方法一:bfs方法二:Dijkstra 算法方法三:A* 启发式搜索算法 题目 题目连接 你被请来给一个要举办高尔夫比赛的树林砍树。树林由一个 m x n 的矩阵表示, 在这个矩阵中: 0 表示障碍,无法触碰 1 表示地面,可以行走 比 1 大的数 表示有树的单元格,可以行走
LeetCode——675 为高尔夫比赛砍树(JAVA)
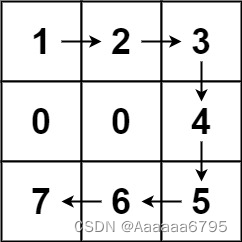
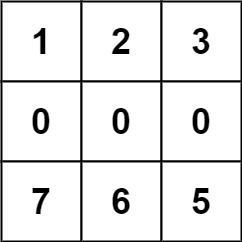
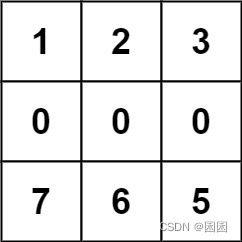
你被请来给一个要举办高尔夫比赛的树林砍树。树林由一个 m x n的矩阵表示, 在这个矩阵中: 0表示障碍,无法触碰1表示地面,可以行走比 1 大的数表示有树的单元格,可以行走,数值表示树的高度 每一步,你都可以向上、下、左、右四个方向之一移动一个单位,如果你站的地方有一棵树,那么你可以决定是否要砍倒它。 你需要按照树的高度从低向高砍掉所有的树,每砍过一颗树,该单元格的值变为 1(即变为地面)
![[LeetCode解题报告] 675. 为高尔夫比赛砍树](https://assets.leetcode.com/uploads/2020/11/26/trees2.jpg)
[LeetCode解题报告] 675. 为高尔夫比赛砍树
[LeetCode解题报告] 675. 为高尔夫比赛砍树 一、 题目1. 题目描述 二、 解题报告1. 思路分析2. 复杂度分析3. 代码实现 三、 本题小结 一、 题目 1. 题目描述 你被请来给一个要举办高尔夫比赛的树林砍树。树林由一个 m x n 的矩阵表示, 在这个矩阵中: 0 表示障碍,无法触碰1 表示地面,可以行走比 1 大的数 表示有树的单元格,可以行走,数
Codeforces Round #675 (Div. 2)A-D题解
Codeforces Round #675 (Div. 2)A-D题解 比赛链接:https://codeforces.com/contest/1422 A题 题意为给定四边形的三条边,让你输出一个整数,与其能够构成一个四边形。 类似三角形的定理,需要满足最小长度的三条边的和需要大于最大的那一条。 这里我选择的构造方式就是用最大的那条边减去另外两条边(和0要取个max)再加1。 #incl
谱分析和机器学习开源项目GraphLab获675万美元资金
开源项目GraphLab的公司化,标志着图谱数据库和图谱处理应用的商业化进程已经启动。 GraphLab是一个流行的图谱分析和机器学习的开源项目,最近该项目剥离出一个独立运作的商业公司GraphLab Inc,其创始人,华盛顿大学机器学习专业教授Carlos Guestrin将负责公司的运作,目前GraphLab已经从Madrona Venture Group和NEA募集了675万美元资金。
谱分析和机器学习开源项目GraphLab获675万美元资金
开源项目GraphLab的公司化,标志着图谱数据库和图谱处理应用的商业化进程已经启动。 GraphLab是一个流行的图谱分析和机器学习的开源项目,最近该项目剥离出一个独立运作的商业公司GraphLab Inc,其创始人,华盛顿大学机器学习专业教授Carlos Guestrin将负责公司的运作,目前GraphLab已经从Madrona Venture Group和NEA募集了675万美元资金。