鸟瞰图专题
经典文献阅读之--U-BEV(基于高度感知的鸟瞰图分割和神经地图的重定位)
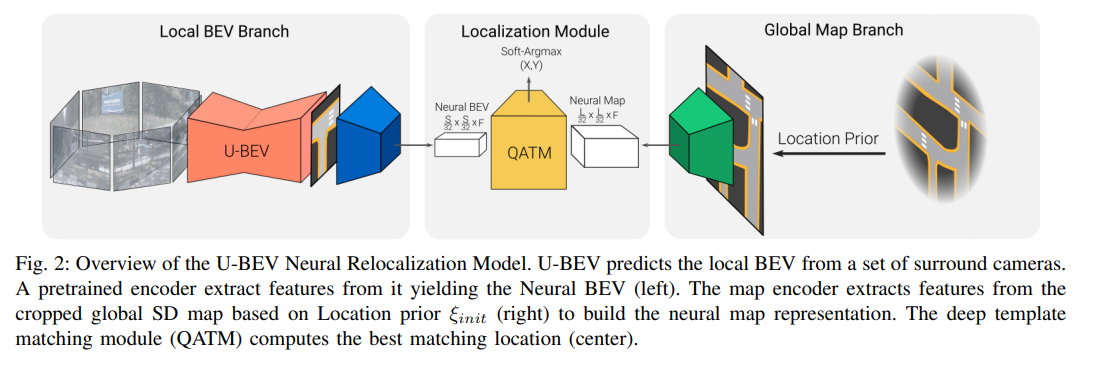
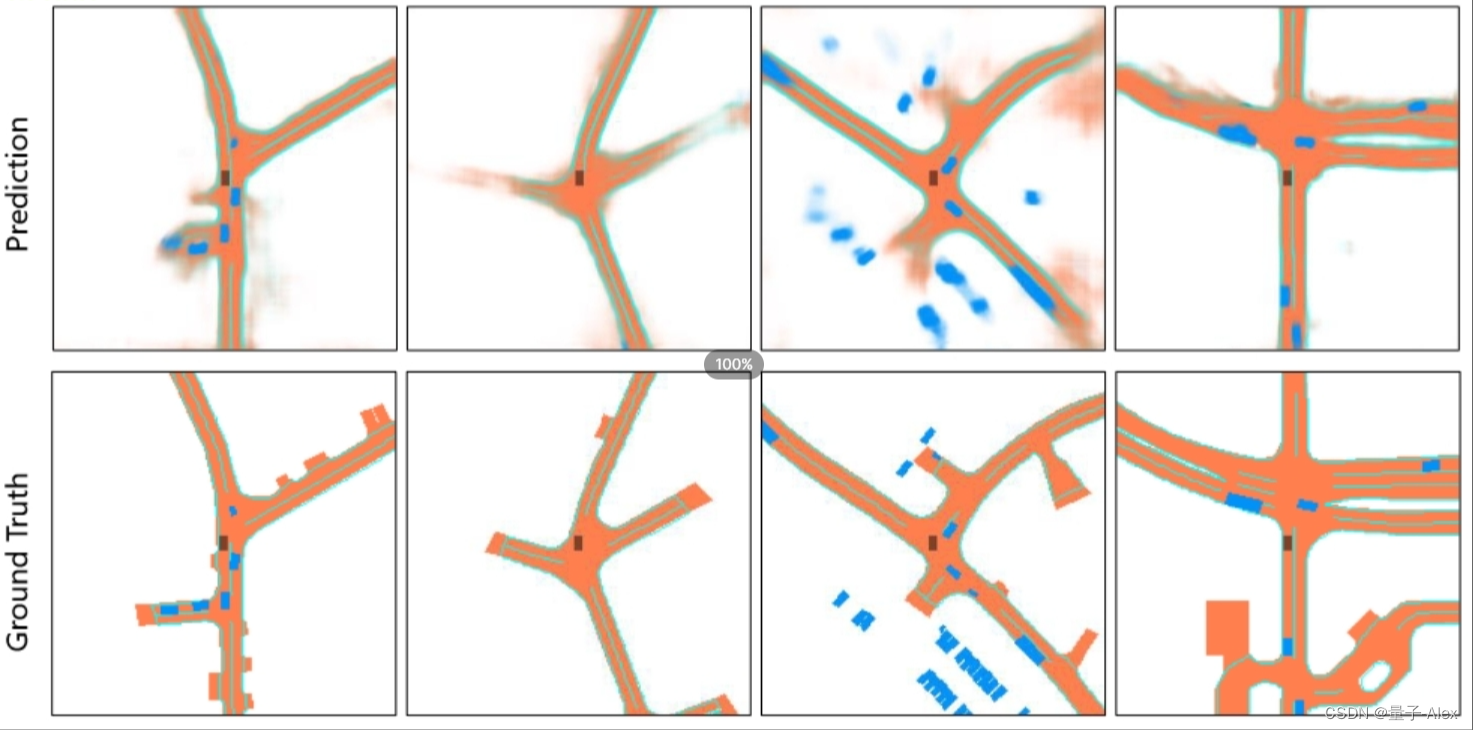
0. 简介 高效的重定位对于GPS信号不佳或基于传感器的定位失败的智能车辆至关重要。最近,Bird’s-Eye-View (BEV) 分割的进展使得能够准确地估计局部场景的外观,从而有利于车辆的重定位。然而,BEV方法的一个缺点是利用几何约束需要大量的计算。本文《U-BEV: Height-aware Bird’s-Eye-View Segmentation and Neural Map-bas
【CV论文精读】【BEV感知】BEVFormer:通过时空Transformer学习多摄像机图像的鸟瞰图表示
【CV论文精读】BEVFormer Learning Bird’s-Eye-View Representation from Multi-Camera Images via Spatiotemporal Transformers BEVFormer:通过时空Transformer学习多摄像机图像的鸟瞰图表示 图1:我们提出了BEVFormer,这是一种自动驾驶的范式,它应用Transforme

机房建设效果图制作|机房鸟瞰图设计|教程文章
因为时间关系,这里只做简易分析,如图所示案例,首先客户得提供资料,例如CAD布置图或是手绘图纸等。这是第一步。 接下来,就需要根据资料和客户沟通,什么地方是什么东西东西,有什么需要特别注意的地方吗,地面,墙面等是什么材质。 剩下的基本就是建模和渲染了。建模的时候要注意,一定要注意房间的高度,因为将来还有吊顶等。一般而言,内部房间的地面材质都是防静电地板,而墙面基本就是刷白或是吸音板铝塑板之类。

Bevformer:通过时空变换从多摄像机图像学习鸟瞰图表示
论文地址:BEVFormer: Learning Bird’s-Eye-View Representation from Multi-Camera Images via Spatiotemporal Transformers 代码地址:https://github.com/zhiqi-li/BEVFormer 论文背景 三维视觉感知任务,包括基于多摄像机图像的三维检测和地图分割,是自动驾驶系
3D目标检测数据集 KITTI(标签格式解析、3D框可视化、点云转图像、BEV鸟瞰图)
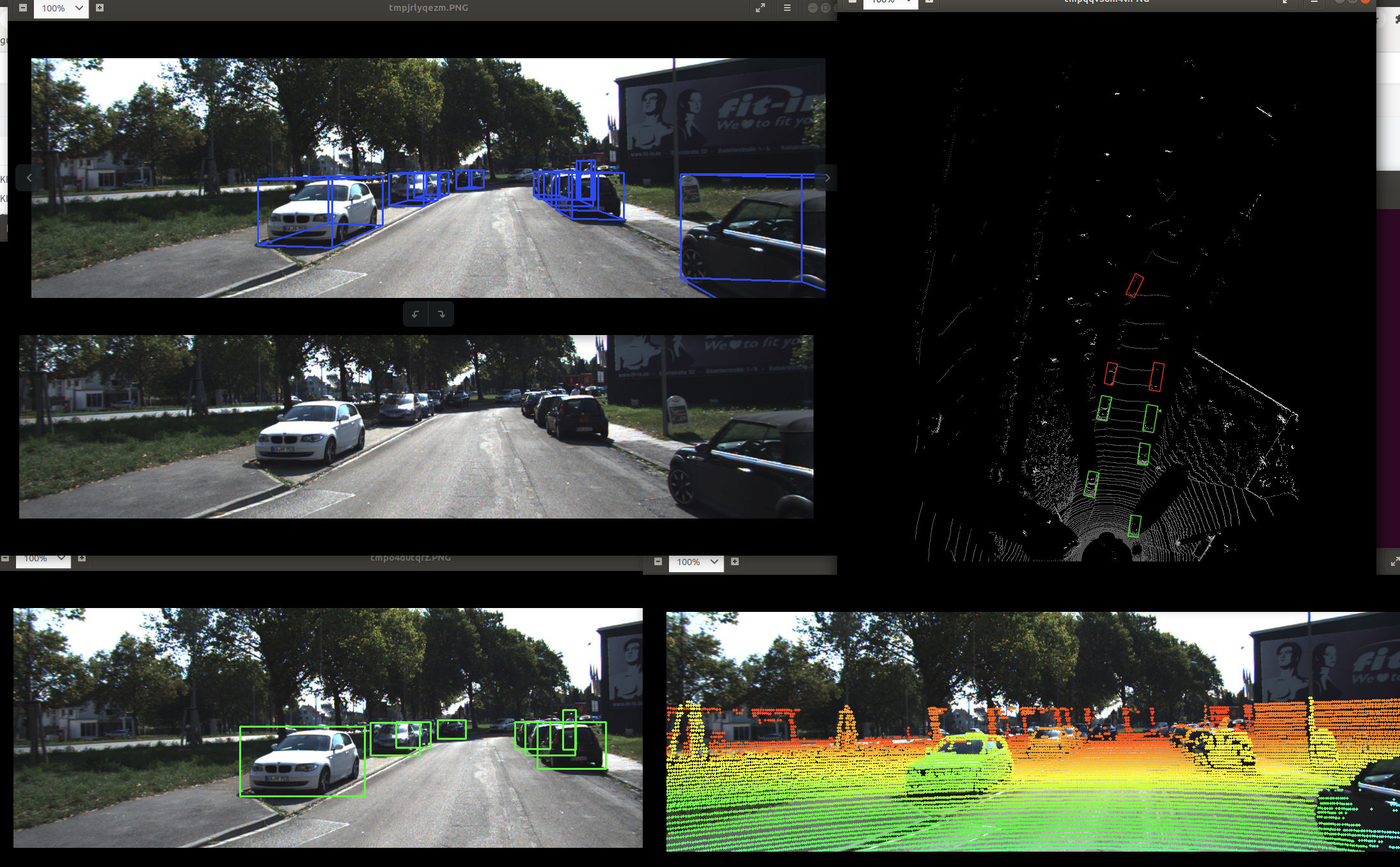
本文介绍在3D目标检测中,理解和使用KITTI 数据集,包括KITTI 的基本情况、下载数据集、标签格式解析、3D框可视化、点云转图像、画BEV鸟瞰图等,并配有实现代码。 目录 1、KITTI数据集3D框可视化 2、KITTI 3D数据集 3、下载数据集 4、标签格式 5、标定参数解析 6、点云数据-->投影到图像 7、图像数据-->投影到点云 8、可视化图像2D结果、3D结果