鲁棒控制专题

鲁棒控制理论学习:静态状态反馈H∞控制器
鲁棒性,即系统的健壮性,是指在异常和危险情况下系统能够维持其功能和性能的能力。在控制系统中,鲁棒性表现为系统在参数摄动下维持某些性能的特性。例如,当控制系统面临输入错误、磁盘故障、网络过载或有意攻击等挑战时,其能否保持稳定并继续有效运行,就体现了其鲁棒性。 状态反馈和前馈是提升系统鲁棒性的两种重要手段。状态反馈是将系统的状态信息作为反馈信号,通过反馈回路来调整系统的控制输入,以达到期望的控制目标

Delta机器人鲁棒控制仿真
由于在构建Delta机构动力学模型的时候采取了一些假设(主动臂从动臂都认为是均质杆1)本次仿真采用关节空间鲁棒计算力矩控制的方法控制机器人。 1.1 计算力矩控制 常规的计算力矩控制策略如图 1所示,使用估计的机器人动力学模型控制实际的机器人,在理想的情况下,即估计所用的模型与实际模型完全一致: M ^ = M , n ^ = n \widehat{M} = M,\ \widehat{n} =
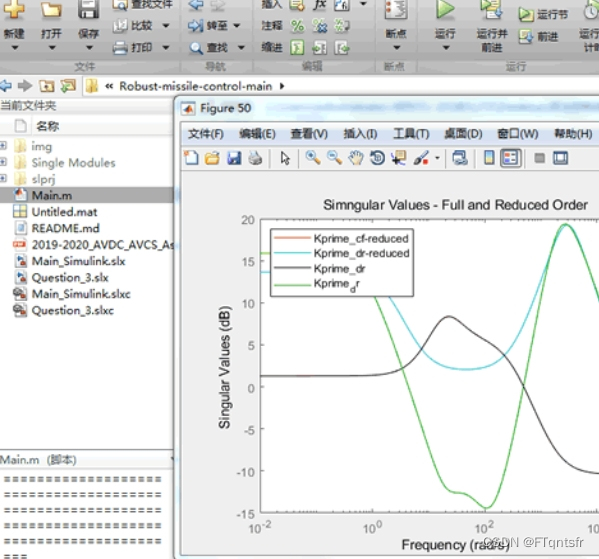
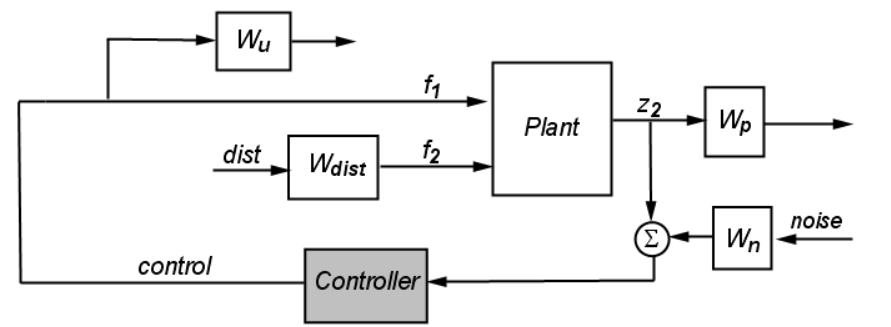
自主控制系统分配:包含一个MATLAB Simulink仿真,用于超音速导弹系统的飞行动态仿真和鲁棒控制
自主控制系统分配:包含一个MATLAB Simulink仿真,用于超音速导弹系统的飞行动态仿真和鲁棒控制 自主控制系统分配在导弹系统中扮演着至关重要的角色,可以有效地提高导弹系统的精度和可靠性。其中,MATLAB Simulink仿真是自主控制系统分配中的关键工具,可用于超音速导弹系统的飞行动态仿真和鲁棒控制。在本文中,我们将详细探讨自主控制系统分配的原理和实现,以及MATLAB Simulin