驱控专题
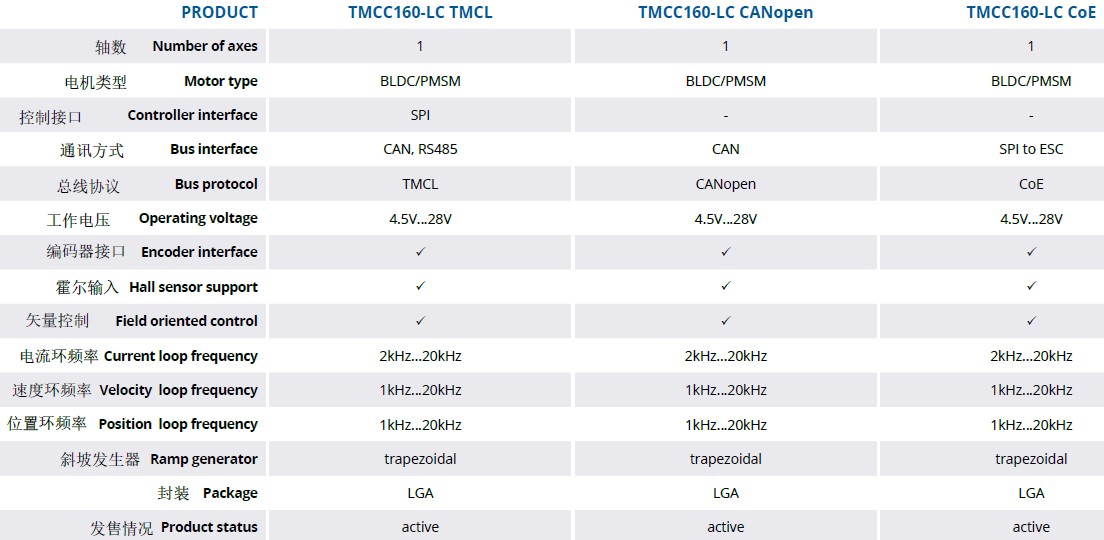
业界首款片载操作系统的直流伺服电机驱控芯片TMCC160
TRINAMIC直流伺服驱控芯片TMCC160助力快速、高效开发伺服电机控制系统 全球首款片载系统直流伺服电机驱控芯片TMCC160. TRINAMIC的TMCC160在一个12mm*17mm的芯片内部集成了电机的预预驱动,微控制和操纵系统。高度集成的芯片只需要增加外部功率桥就可以实现一个完整的伺服电机控制系统。TMCC160可以帮助研发人员很容易地快速开发出伺服电机控制系统,将缩
驱控一体理论知识汇总
驱控一体理论知识汇总 机电理论知识 安培环路定律 ∮ L H d l = ∑ i \oint_{L}Hdl = \sum{i} ∮LHdl=∑i L:闭合曲线,H:磁场强度,i:穿过闭合曲线的电流。电流正方向与L的环形方向符合右手螺旋关系时,i取正号,否则取负号。 磁路电动势 类似电路中的电动势, f A = ∑ i A = N A i A f_A = \sum{i_A}
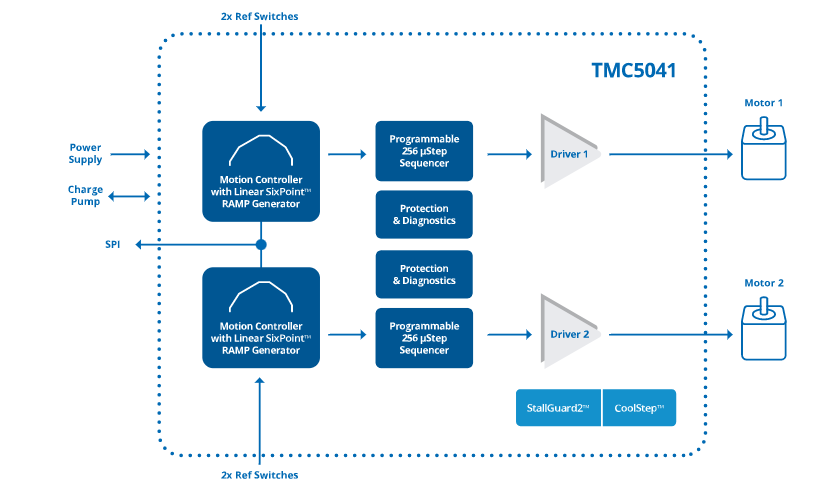
TMC5041-LA 步进双轴驱控一体芯片-一颗芯片控制两个轴
最近的一个项目是有用在光纤拉锥机, 光纤熔融拉锥机简单原理:熔融拉锥的基本方法就是将两根光纤或以上)去除涂覆层的光纤以一定的方式靠拢,在高温加热下熔融,同时向两侧拉伸,最终在加热区形成双锥体结构的特殊波导器件。当两根光纤融合时,输入光信号从一根光纤进入两根光纤.假定两根光纤规格相同,输入光功率为P0,那么拉锥过程中两根光纤的光功率分配分别为Pocosz 和 inz ,其中入是由光纤芯径、输入光
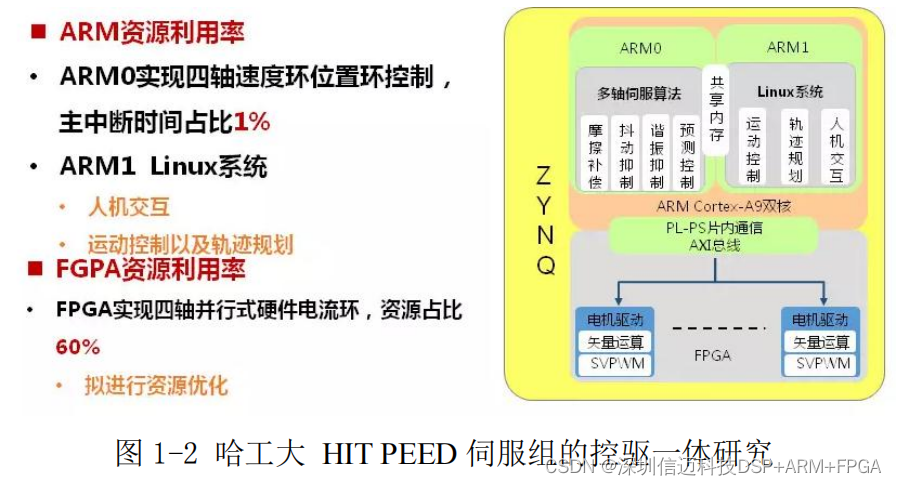
基于ARM+FPGA的驱控一体机器人控制器设计
目前市场上工业机器人,数控机床等多轴运动控制系统普遍采用运动控制器加 伺服驱动器的分布式控制方式。在这种控制方式中,控制器一方面完成人机交互,另 一方面进行 NC 代码的解释执行,插补运算,继而将计算出来的位置指令通过轴组模 块下发给各个伺服驱动器。下发过程通常是由现场总线完成,总线周期为 4 ms 或者 更小。伺服驱动器接收位置指令,位置细分后通过