锥桶专题

基于UE5和ROS2的激光雷达+深度RGBD相机小车的仿真指南(五):Blender锥桶建模
前言 本系列教程旨在使用UE5配置一个具备激光雷达+深度摄像机的仿真小车,并使用通过跨平台的方式进行ROS2和UE5仿真的通讯,达到小车自主导航的目的。本教程默认有ROS2导航及其gazebo仿真相关方面基础,Nav2相关的学习教程可以参考本人的其他博客Nav2代价地图实现和原理–Nav2源码解读之CostMap2D(上)-CSDN博客往期教程: 第一期:基于UE5和ROS2的激光雷达+深度RG

利用YOLOv5模型进行锥桶识别
目录 1. YOLOv5模型简介 2. 准备数据集 3. 训练模型 4. 模型评估 5. 模型部署与应用 6. 注意事项 在计算机视觉领域,目标检测是一项重要的任务,它可以帮助我们识别图像或视频中的特定物体并进行定位。而YOLOv5是一种高效的目标检测模型,具有快速、准确的特点,能够广泛应用于各种物体识别任务。本文将介绍如何使用YOLOv5模型进行锥桶的识别,以及相关的
(七) yolov5s自己数据集训练 锥桶检测
0、配置环境 配置yolov5s所需的环境: 框架:pytorch 环境管理:anaconda(推荐) IDE:pycharm(推荐) 前边系列有讲过,这里先跳过了 数据集准备 数据集,就是针对于自己任务的图片和标签,以自己的应用场景为例需要检测锥桶,数据打标签的方法在上一篇这里https://blog.csdn.net/qq_53086461/article/details/1292103
(八)锥桶赛道路径规划
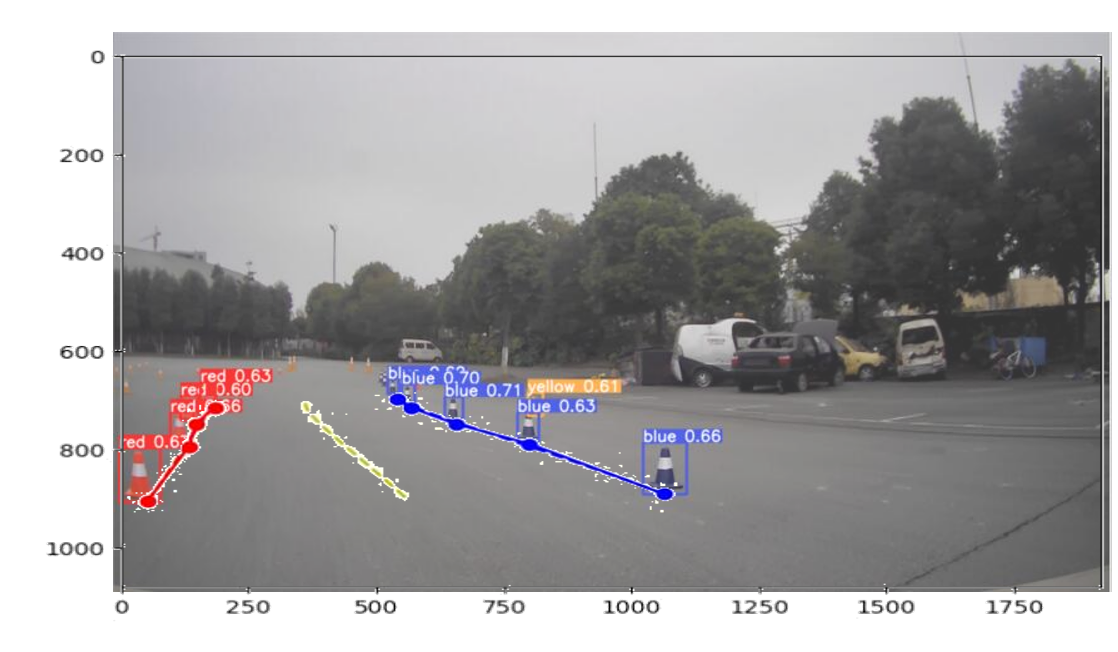
1、参考资料 三角剖分:https://blogs.mathworks.com/student-lounge/2022/10/03/path-planning-for-formula-student-driverless-cars-using-delaunay-triangulation/ 贝塞尔曲线https://muzing.top/posts/6610880/ 2、任务需求 在赛道进行路径