趋近专题

AWPortrait1.4更新,人物的生成更加趋近真实感,将SD1.5人像的真实感提升到了一个新的高度
AWPortrait1.4更新,人物的生成更加趋近真实感,将SD1.5人像的真实感提升到了一个新的高度 经过5个月,AWPortrait终于迎来了1.4。 本次更新基于1.3训练,使得人物的生成更加趋近真实感,将SD1.5人像的真实感提升到了一个新的高度。AWPortrait1.4的人物生成效果很真实。 增加了旗袍、汉服等东方元素,更好的棚拍效果及户外效果; 优化了close up下的
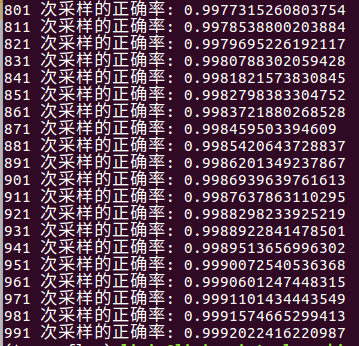
python模拟多次采样通过低概率事件多次重复实验趋近必然事件
只接代码演示好了: import operator import numpy as np import matplotlib.pyplot as plt from functools import reduce def cal(n, k): # 返回排列组合的:从总体中选取若干的个体排列组合总数 return reduce(operator.mul, range(n
![[学习分享]滑模控制、终端滑模控制、非奇异快速,趋近律、饱和函数、Matlab仿真、干扰、非线性控制[半天入门]](https://img-blog.csdnimg.cn/7de0fb3b5f42491cba2c4b71f0446749.png)
[学习分享]滑模控制、终端滑模控制、非奇异快速,趋近律、饱和函数、Matlab仿真、干扰、非线性控制[半天入门]
鉴于本人学习经历,滑模控制临时使用,尤其是改进型终端滑模控制,过程中复现了两篇论文入门,均基于Matlab/Simulink仿真,考虑时间关系,未严谨编辑,现进行简单分享,建议对照原文献阅读,版本MATLAB R2021b,文献及仿真资源已上传。 本文要点:滑模控制、终端滑模控制、Matlab仿真、趋近律、饱和函数 参考文献: [1]赵海滨,陆志国,刘冲,于清文,颜世玉.非奇异终端滑模控制仿
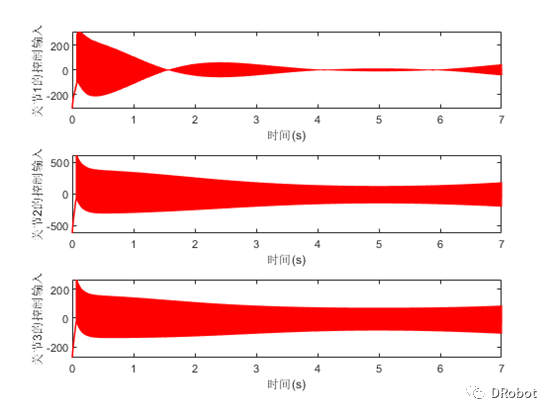
基于指数趋近律的机器人滑模轨迹跟踪控制算法及MATLAB仿真
机械手是工业制造领域中应用最广泛的自动化机械设备,广泛应用于工业制造、医疗、军工、半导体制造、太空探索等领域。它们虽然形式不同,但都有一个共同的特点,即能够接受指令,并能准确定位到三维(或二维)空间的某一点进行工作。由于其在3D打印、喷漆机器人、汽车制造等领域的广泛应用,机器人的控制显得尤为重要。而滑模变结构控制SMC由于其快速的瞬态响应和对不确定性和扰动的鲁棒性,在机器人控制领域受到了广泛