角位移专题

3D数学基础--3D中的方位与角位移(2)
前言:3D中讨论的四元数都是单位四元数 四元数记法 上一章节讲了用三个数表达3D方位一定会有万向锁这样的问题,它涉及到一些非常高级的数学概念,如“簇”。而四元数通过使用四个数来表达方位,从而可以避免这些问题,下面先来看看它的记法: 注:w:类似复数实部,v:虚数。 四元数的数学渊源 四元数其实是由数学里的复数引申而来的,首先来简单说下什么是复数?复数=实数+虚数,它扩展了如对一个负数
3D数学基础--3D中的方位与角位移(1)
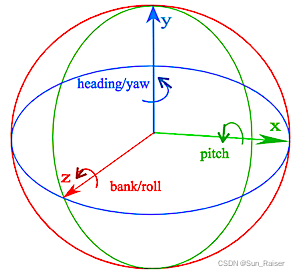
方位基本概念介绍 1,什么是方位?直观地说,方位主要描述的是物体的朝向。比如:我们知道的向量,它就只有方向但没有方位,因为它只有大小,而没有厚度和宽度,所以让向量自转其属性是不会发生任何变化的。然而,如果是一个物体,让它和向量一样自转,你会发现物体的朝向改变了,即方位发生了变化。示意图如下: 2,方位和角位移关系:我们知道不能用绝对坐标来描述物体的位置,要描述物体位置,必须把物体放在特定的

【单片机】使用AD7606+AD698芯片读取RVDT角位移
接上文,经过第一阶段的AD2S1210测量旋转变压器的角位移之后,现在用AD698来进一步的加强验证,目前网上有关于这方面的研究资料还是挺少的。 AD698是美国ADI公司生产的单片式线性位移差分变压器信号调节系统。将AD698与RVDT/LVDT配合,能够高精确性、可重复性的将RVDT/LVDT的旋转/机械位移转换成单极性或双极性的直流电压,消除原边驱动的幅度漂移所导致的比例系数误差,
3D 中的方位与角位移(旋转矩阵、欧拉角、四元数)
文章目录 一、3D 中的方位与角位移1. 欧拉角 (Euler angles)2. 四元数的相关知识2.1 复数2.2 欧拉旋转定理2.3 三维空间旋转的拆分 3. 四元数 (Quaternion)3.1 四元数的运算3.2 四元数默认在极坐标下3.3 四元数的常用插值方法3.4 贝塞尔曲线和 Squad 插值 4 欧拉角、旋转矩阵、四元数的互相转换4.1 欧拉角和旋转矩阵4.2 四元数和旋